
仿生魚Airacuda
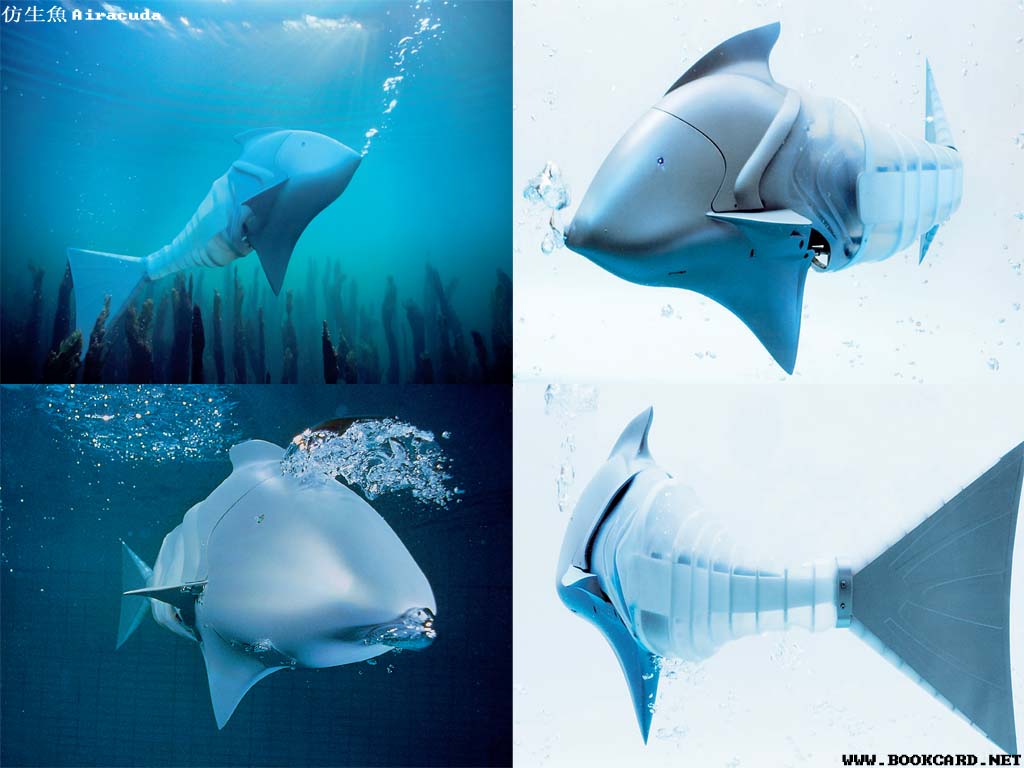
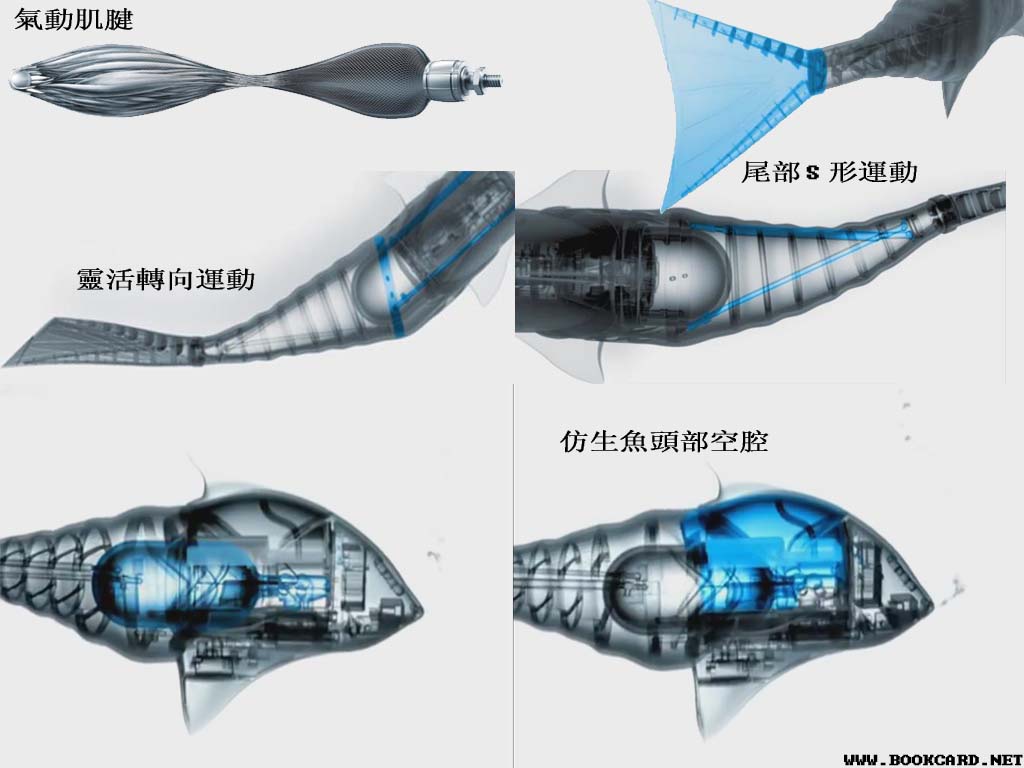
仿生魚Airacuda 它的動力來源於4條氣動肌腱(Fluidic muscle).兩根氣動肌腱控制尾部的S形運動,另外兩根氣動肌腱用於靈活轉向運動.長度1米,寬度28CM,高度45釐米,重4KG..
氣動肌腱(Fluidic muscle).主要人工橡膠軟管構成,內部嵌有尼龍纖維,當氣動肌腱內充滿空氣的時候,其直徑增加,長度縮短,形成一種流暢的彈性運動.氣動肌腱堅固耐用,其作用力比相同尺寸的氣缸大10倍,能在沙塵沙石的極端條件下工作.
它的設計外形和動力遵循魚的生物模型,電子和氣動部件隱藏在它防水的頭部中,魚鰭由交互牽引和壓力邊緣構成,它們通過骨架連接, 當在側方施壓時,這一幾何結構自主朝施壓方向彎曲.
仿生魚頭部內藏有空腔,就好像潛水艇一樣,下潛吸入海水,上浮排出海水吸入空氣,通過壓力感測器回饋的信號來控制氣閥的開閉,以控制空腔內是海水和空氣比例.以控制下潛深度.







你必須登入才能發表留言。