袋鼠機器人BionicKangaroo
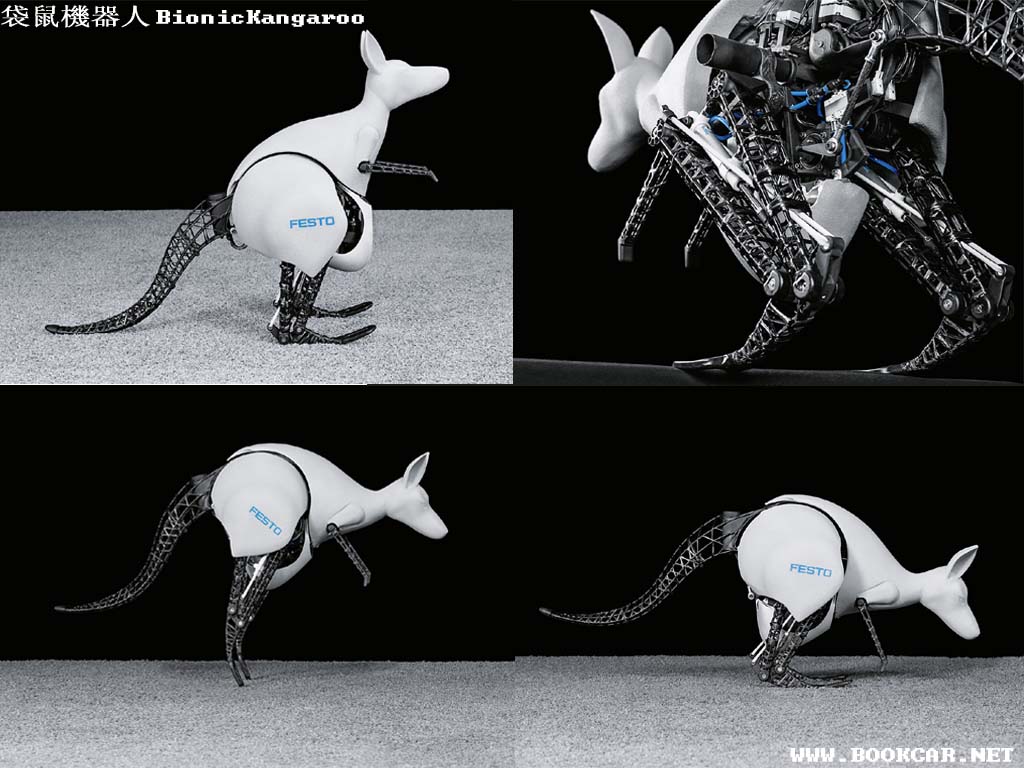
德國Festo公司花費兩年時間成功開發出袋鼠機器人(BionicKangaroo), 在技術上再現袋鼠獨特的跳躍運動. 並讓袋鼠機器人穩定地跳躍及著地,操作者透過手勢控制.如站立、轉向和跳躍等等. 袋鼠機器人高1米,重量僅有 7公斤.它能跳躍0.8米的水準距離和0.4米的垂直高度.不過與12米的澳洲袋相比差距還非常大.
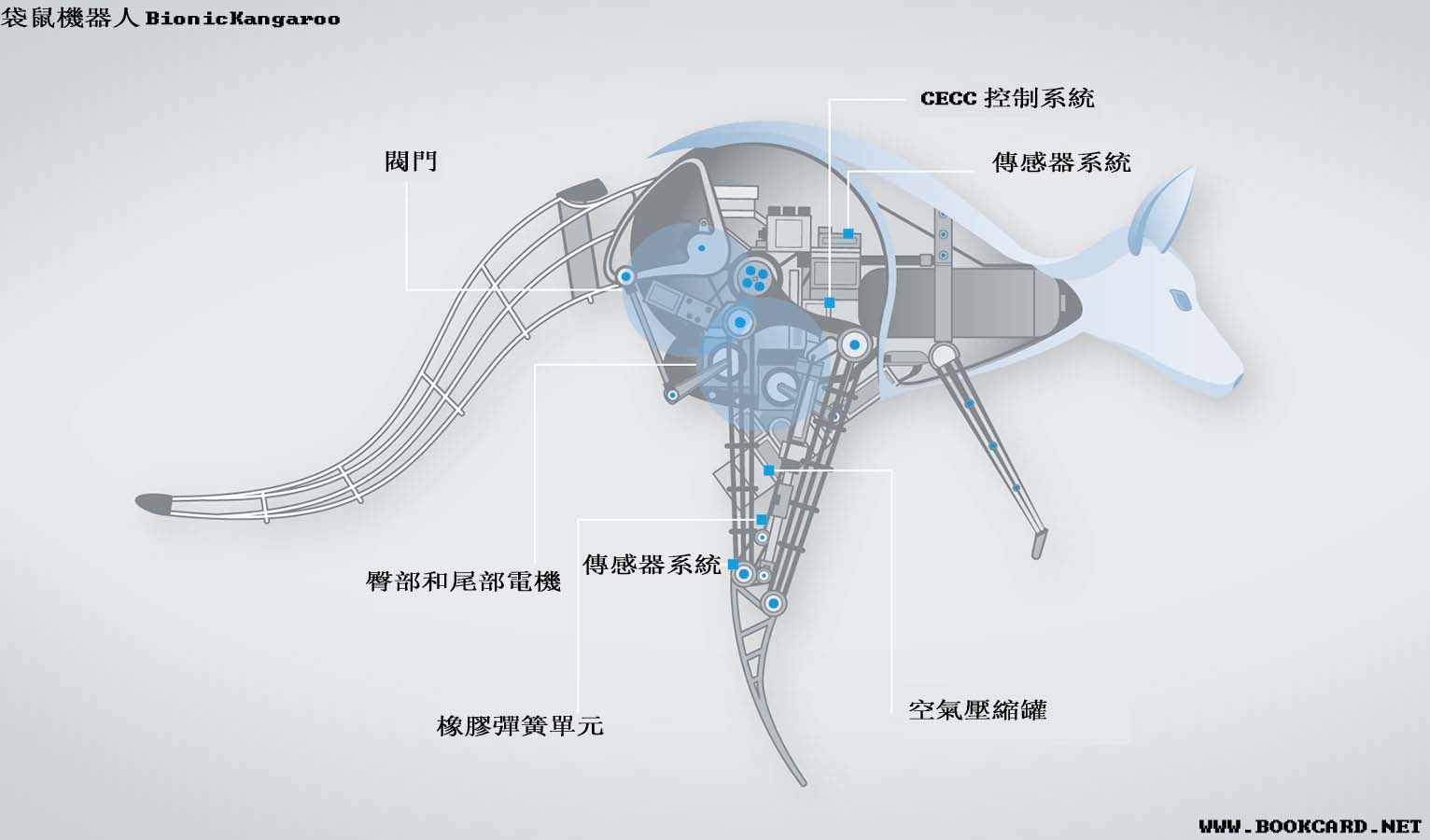
袋鼠機器人採用了氣體動力學和電驅動技術.它的氣動裝置負責為跳躍提供足夠的動力,電動馬達負責維持自身的平衡和精確的控制姿勢,袋鼠機器人會自我根據自身的狀態調整尾巴和臀部的運動從而保持高平行.
袋鼠機器人增加了能量回收系統,能夠從上一次的跳躍中儲存能量為下一次跳躍做準備,袋鼠機器人的跟腱(髖關節)結構是由高密讀橡膠構成的彈性材料,跟腱結構為袋鼠的跳躍提供動力和緩衝,在準備跳躍時跟腱被拉緊加大彈性勢能,同時袋鼠向前傾斜和控制尾巴調節自身重心,當跟腱放開時袋鼠一躍而起.跟腱電機驅動腿部前擺,並擺動尾部以保持平衡,袋鼠機器人落地時,跟腱再次被拉緊儲能,為次一跳躍做準備.
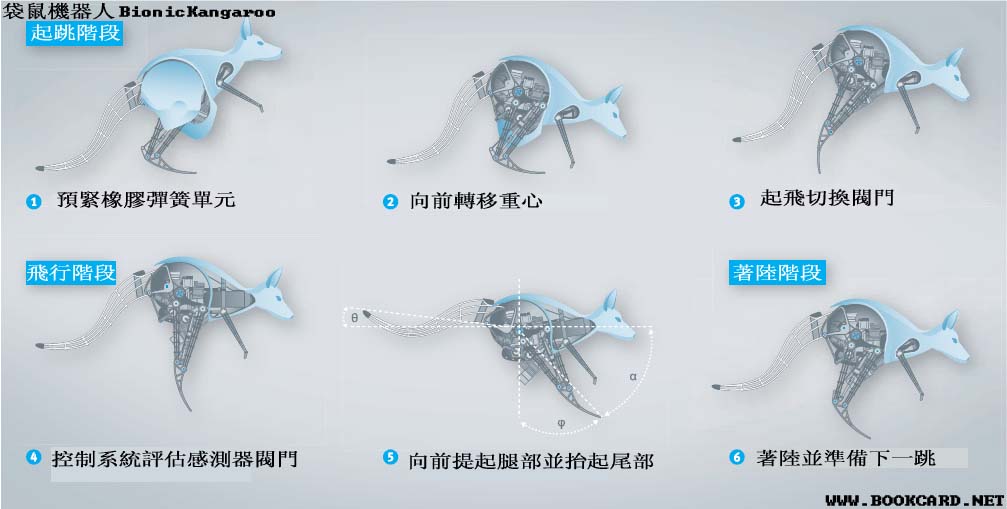
它分为三个階段,起跳階段,飛行階段,著陸階段.
起跳階段:膠彈跟腱預緊并向前轉移重心,起飛切換閥門.
飛行階段:控制系統評估感測器閥門,向前提起腿部並抬起尾部.
著陸階段:著陸跟腱再次被拉緊儲能並準備下一跳.