
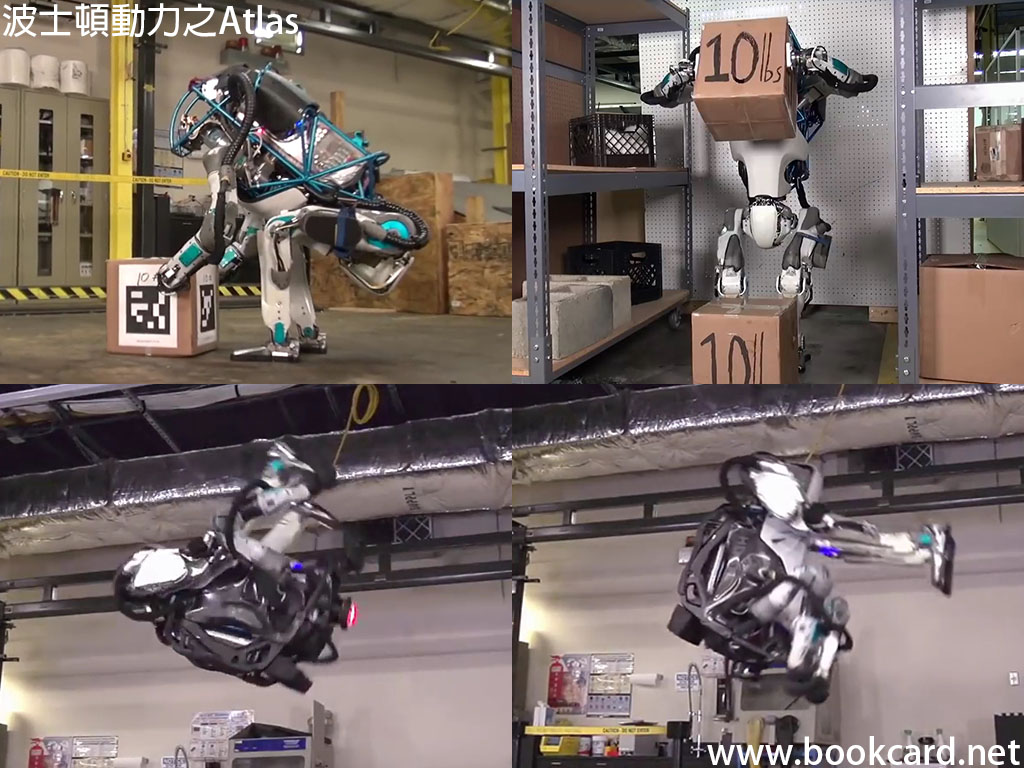
『Atlas』是波士頓動力研發雙足仿真機器人.其控制系統通過協調手臂,軀幹和雙腿,實現『搬箱』(唔可以太重最多搬起一包米)『跳上』『跳落』『空中360度轉體』『後空翻』等動作. (後空翻好多人都做唔到)
『Atlas』通過3D打印技術使其更輕更緊湊,讓液壓系統置於腿部.並重新設計更輕巧的步進馬達.使其具有高強度外殼和低重量比.通過『立體視覺』,『距離感應』和其他傳感器使『Atlas』能在其崎嶇地面上步行.並在『推』『撞』下保持平衡.就算跌低都可以爬起身.
| 參數 | 數值 |
| 高度 | 1.5m |
| 體重 | 75kg |
| 負重 | 11kg |
| 動力 | 電動 |
| 驅動 | 液壓 |
| 感知 | 激光雷達與三維視覺系統 |
| 關節 | 28個 |