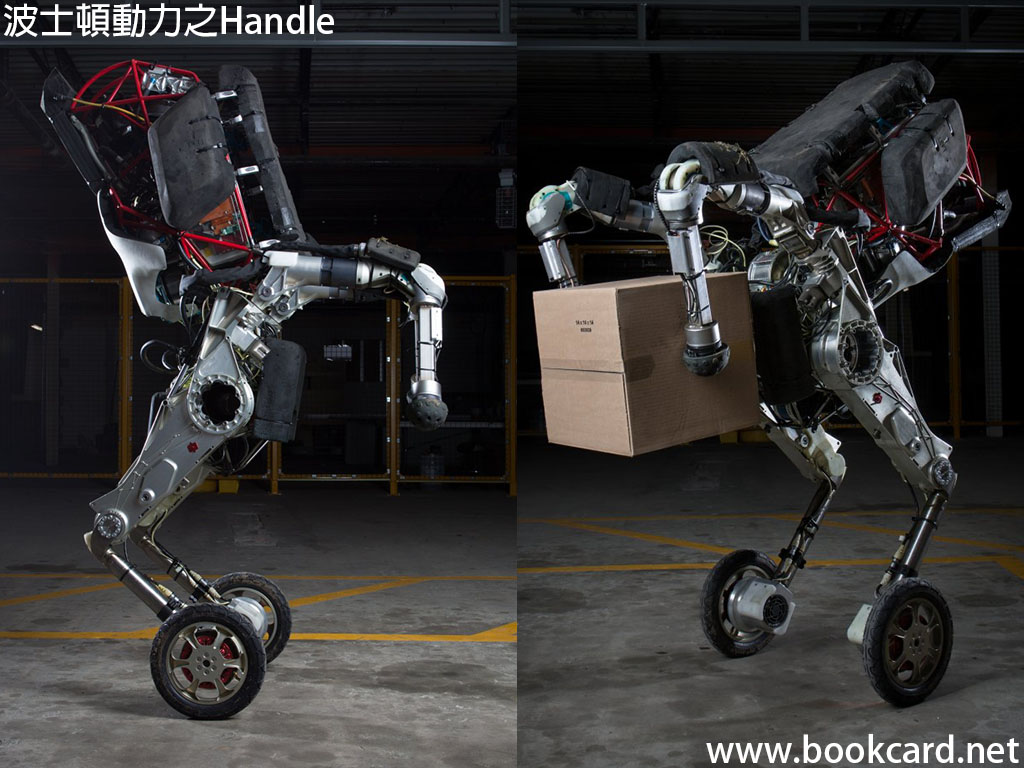

『Handle』是美國波士頓動力種製作的機器人,它將兩個車輪裝在雙腿,結合波士頓動力之前製作的『四足動物』和『兩足機器人』的動力學、平衡和移動操縱原理.它的結構非常簡單只有10個驅動關節.車輪在崎嶇地表都能高速走動『落斜』『落樓梯』『自轉』『單邊橋』『跳欄』.雙腿幾乎可以在任何地方行走.比起通過雙腿或四足走動的機器人更高效.通過雙腿與車輪結合『Handle』具有兩全其美的優點.充滿電後大約可行使24km.
『Handle』通過液壓制動可以拿起超過45KG(100磅)的負重,但雙腿卻很細可以在狹小的空間內移動.所有關節都自動進行了協調,實現高難度動作.如果量產搬運工要失業.
| 參數 | 數值 |
| 高度 | 2m |
| 體重 | 105kg |
| 速度 | 14.5km/h |
| 跳高 | 1.2米 |
| 負重 | 45kg |
| 動力 | 電池 |
| 驅動 | 液壓與電動 |
| 感知 | 深度相機 |
| 關節 | 10個 |