





雖然員工搭車唔使錢,因返工地點路遠車疏塞車要成個幾鐘.想買電單車代步.原裝進口買唔起,只可買大陸生産.睇中大陸『鳳凰牌』,原包裝整箱運到樓下.整車已經裝好,安裝車頭車尾兩方形反光牌,前後車輪左右兩側圓形反光牌.圓形反光牌缺一.插入鋰電並鎖死,即完成安裝.車身與車輪均爲鋁,依言比非電動單車重.主要馬達和鋰電重,車輪12寸只可自用唔可車人.前LED燈好過無.車身可摺叠但依然不要帶上大巴或地鐵.人太多依然妨礙她人.『LED燈』與『檔位鍵』開關應設獨立鍵.雖然話防水但一旦大雨控制面板入水『檔位鍵』會失靈.
啓東電單車
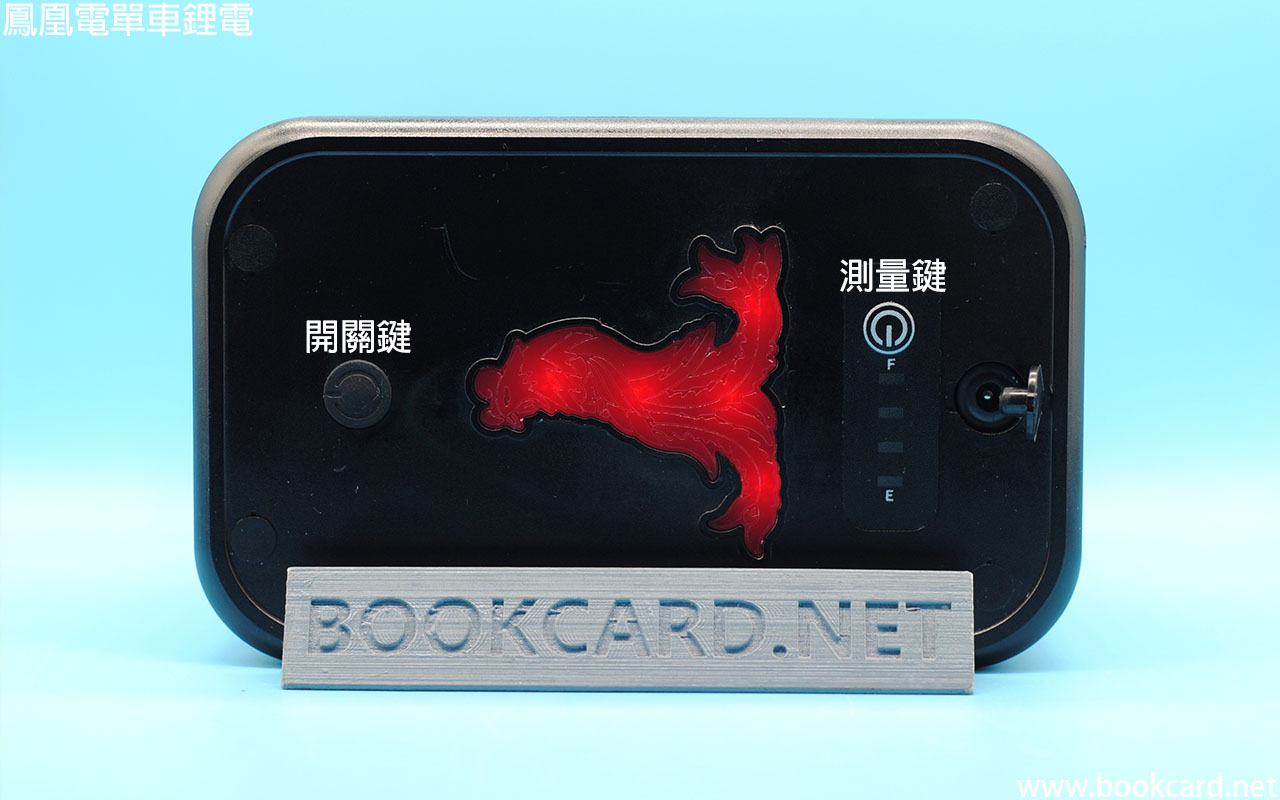
- 先按『鋰電』開關鍵3秒喚醒鳳凰.上側黑色為鋰電『開關鍵』,下側白色為電量『測量鍵』.
- 再按儀表『電源』ON/OFF開關鍵3秒
- 向內『逆時針』轉動調速把手『右側』,但起步無力要脚踩助力起步.
- 三檔動力調速,只作用于助力模式,即脚踩助力.左側燈最細助力,右側燈最強助力.
- 臨時停車要刹死後輪『左手刹』.以免誤馬達啓動造成前輪跳起.
- 落車要關閉儀表『電源』.按住ON/OFF開關鍵3秒
| 鳳凰 | PHOENIX |
| 信號 | TDW002Z |
| 長*寬*高 | 1243mm*550mm*970mm |
| 車重 | 18.60KG |
| 驅動 | 電動+助力 |
| 最高時速 | 24km/h |
| 續航 | 35KM |
| 百公里電耗 | 1.2kW-h/100KM |
| 鋰電 | 18650動力電芯10.4Ah |
| 車架 | 航空鋁 |
| 車輪 | 12寸鎂合金一體輪 |
| 馬達 | 無刷馬達250W |
| 刹車 | 前後雙碟刹 |









你必須登入才能發表留言。