仿生海鷗SmartBird

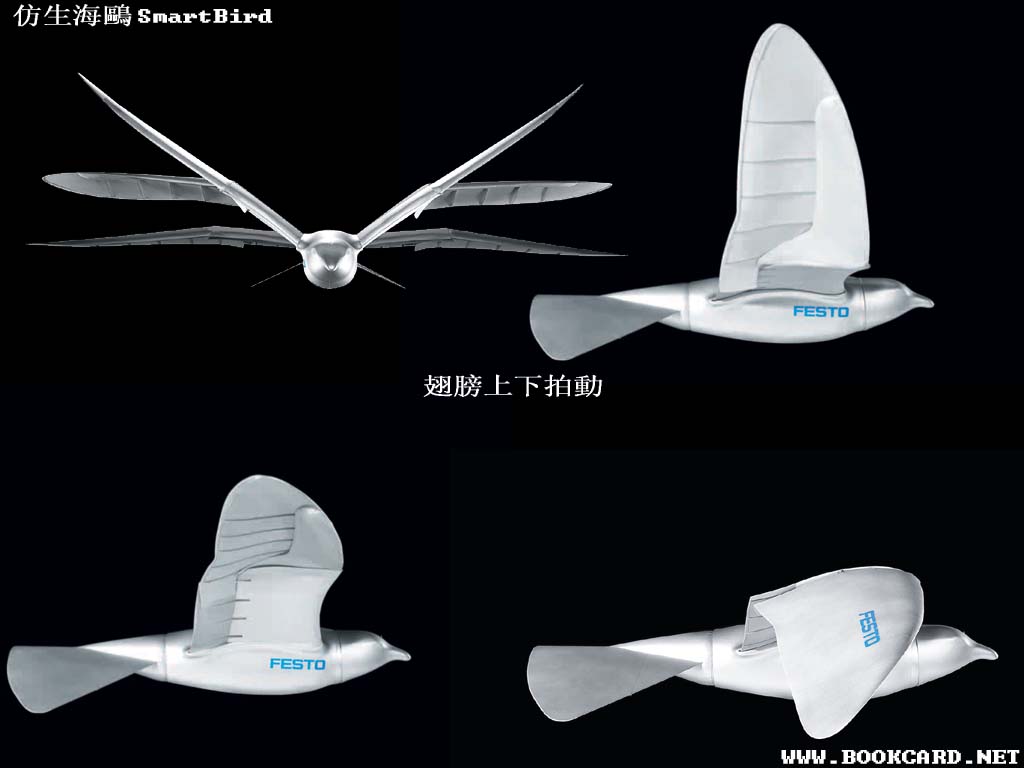

仿生海鷗SmartBird 具有超輕便和強大的飛行模型氣動特性和極強敏捷性,可以自主飛離地面,無需額外的驅動機制,它的翅膀不僅可來回拍打,而且具有一定的扭曲角度.由一個主動關節扭轉驅動器, 在複雜的控制系統的結合下得前所未有飛行效率,使用超輕便材料構造,符合空氣動力學的設計.
仿生海鷗的不尋常的特點是它的翅膀主動扭轉無需使用額外的升降裝置, 仿生海鷗實現高效的整體結構在資源和能源消耗方面,以最小的總重量,結合推進功能集成並在兩翼和飛行控制單元的軀幹和尾部,進一步的要求是良好的空氣動力學,推進和提升的高功率密度,和最大敏捷性飛行工藝.
主動關節扭傳動, 翅膀飛行包括兩個主要的運作.首先, 翅膀上下運動,從而使杠杆機構從軀幹到翼梢的偏轉程度增加,在這過程中, 在向上飛行期間其前緣翅膀扭曲,使翅膀為正角度,如果翅膀旋轉是由於翅膀的彈性導致扭轉,驅動器將主動控制機翼的扭轉.
鳥類的升力和推力有翅膀產生,仿生海鷗的翅膀各有兩臂翼梁軸支承在軀幹上,就好像使用的梯形關節提起兩臂翼翼梁.梯形關節的振幅比為1:3。臂翼產生升力,臂翼的梯形關節產生推力。內翼和外翼的翼梁都是抗扭的, 主動扭轉是通過在外翼端部處的伺服電機實現,其通過翼外側肋骨將翼扭轉到翼梁.
線性運動學用於獲的最優推力,當仿生海鷗抬起翅膀時,伺服電機主動扭轉,扭轉兩臂翅膀的尖端到正向角度,然後將其改變為負度,角度為翅膀節拍週期的分數,扭轉角度在它們之間保持恒定,由於這一系列的運動使氣流沿著翼型可以最優地產生推力.
軀幹在安全的外殼裏,電池,發動機和變速箱,曲軸機構和控制和調節電子器件被容納在仿生海鷗的軀幹中. 通過兩級螺旋傳動,外部轉子電機使翅膀隨著減速而上下振動比例為1:45. 該電機配有三個霍爾感測器,可精確記錄翅膀的位置, 震盪和彎曲力從變速器經由翅膀傳遞到彈性連杆. 曲柄機構沒有死點以最小的峰值負載均勻運行,從而確保平穩飛行.
頭部和軀幹部分在任何空間中的相對運動方向通過兩個電機同步聯動. 軀幹會根據空氣動力學同時彎曲和比重位移; 這使仿生海鷗高度敏捷和靈活.
尾部輔助升力和控制,仿生海鷗的尾巴也產生升力;它既起到調節升力和偏航的作用。 當鳥沿直線上飛行時,其兩個尾翼的V位起到穩定的翅膀作用, 當轉向左或右時尾部傾斜:當它繞者縱向軸旋轉時產生繞垂直軸的偏航力矩.