




旺財與貓不同它已經進化為我們的一分子,大量旺財聚在一起睡覺超得意.旺財店的老闆想我幫親不過家裏無定放養最種要的是無時間陪它玩.不過在古代旺財就沒有甘幸福不但負責看屋最後還要當作食材.
www.bookcard.net
旺財與貓不同它已經進化為我們的一分子,大量旺財聚在一起睡覺超得意.旺財店的老闆想我幫親不過家裏無定放養最種要的是無時間陪它玩.不過在古代旺財就沒有甘幸福不但負責看屋最後還要當作食材.
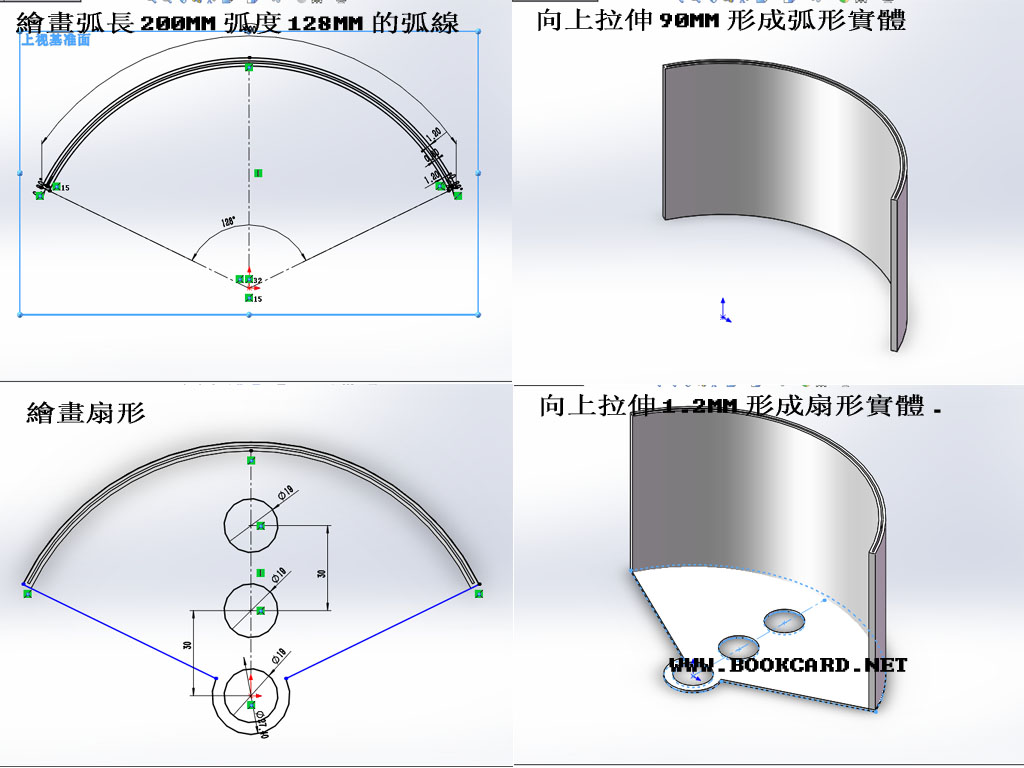
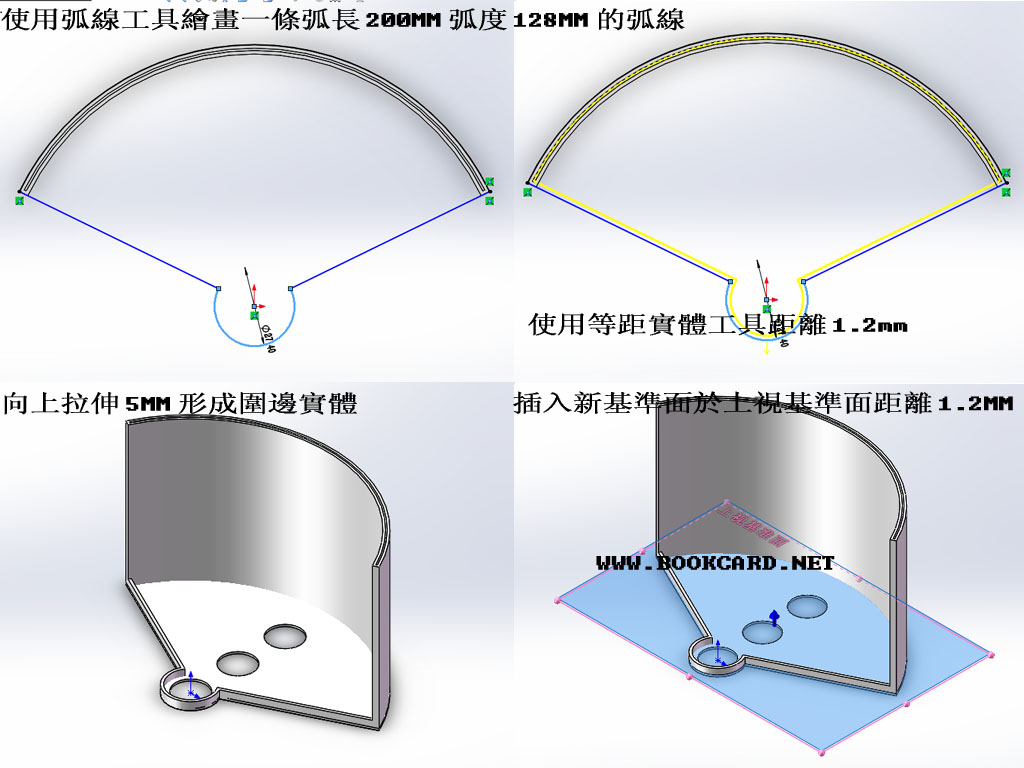
SOLIDWORKS製作WIFI增幅器3D模型,在網路有一種使用易開罐製作WIFI增幅器的文章,單是易開罐的鋁片只有0.1MM容易劃損手而且又不美觀,我這裏使用3D打印機制作固定支架再鑲嵌鋁片.外觀效果不錯,只是夾具部分不能使用PLA做材料它太脆.
WIFI增幅器支架部份
WIFI增幅器天線套部份
1.新建零件模型
2.選擇”前視基準面”做為草繪平面.進入草圖模式
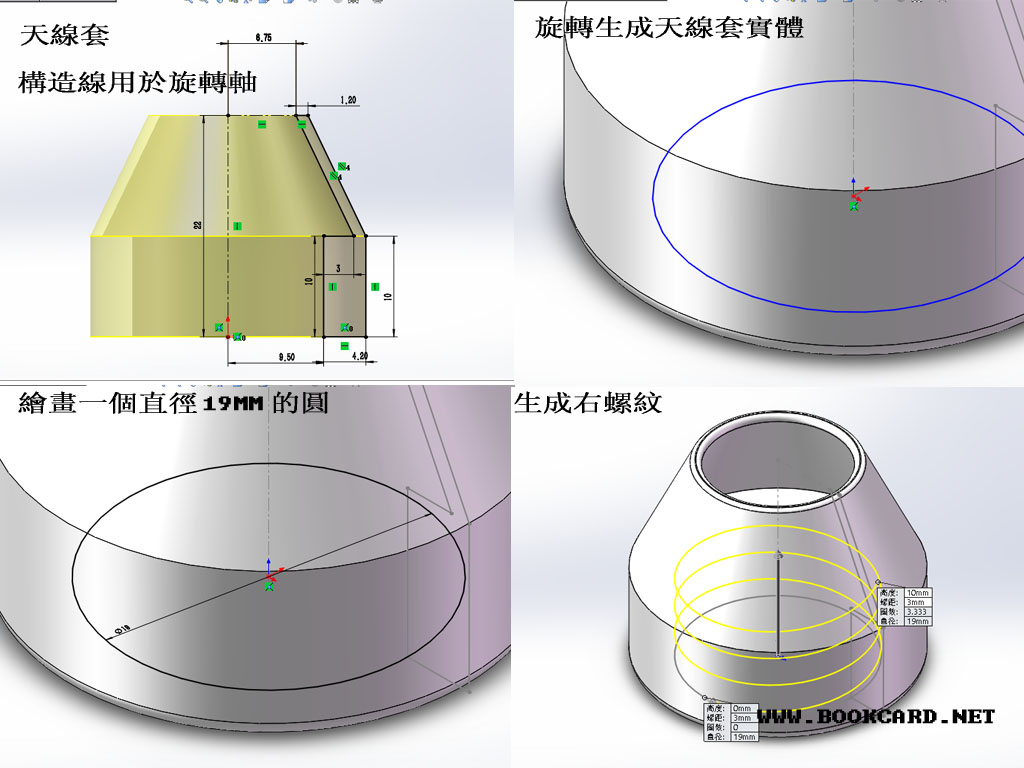
3.繪畫如上圖的草圖用於旋轉,在中心點繪畫一條構造線用於旋轉軸,退出草圖
4.使用旋轉工具生成天線套實體,角度360度.
5.選擇”上視基準面”做為草繪平面.進入草圖模式
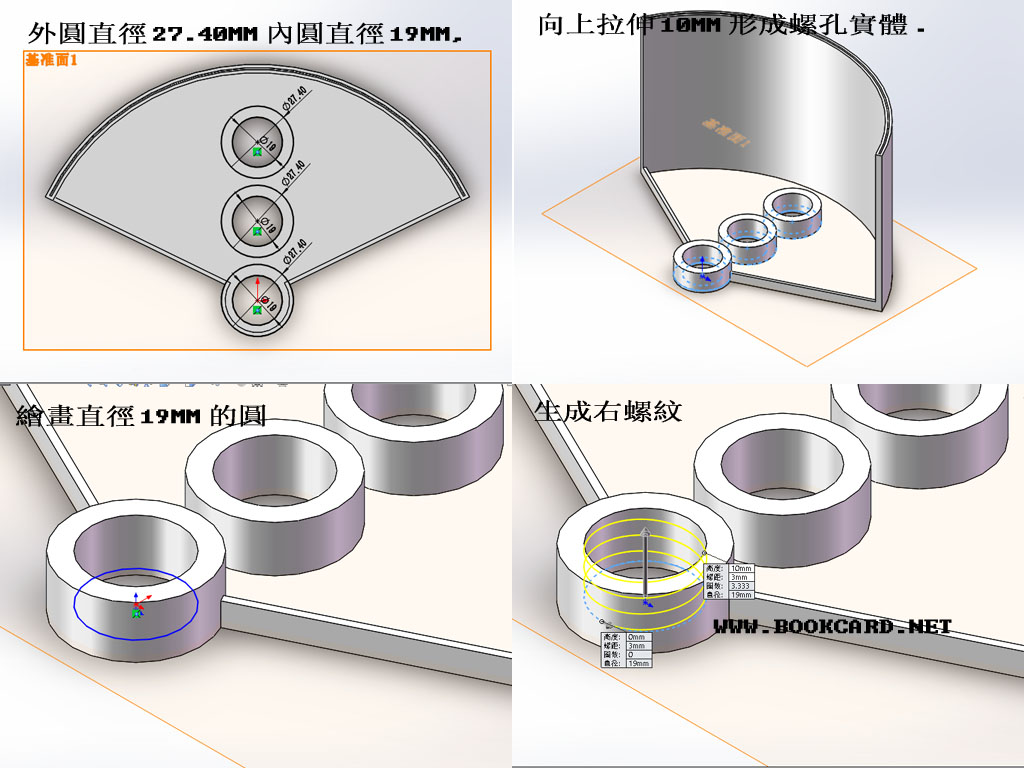
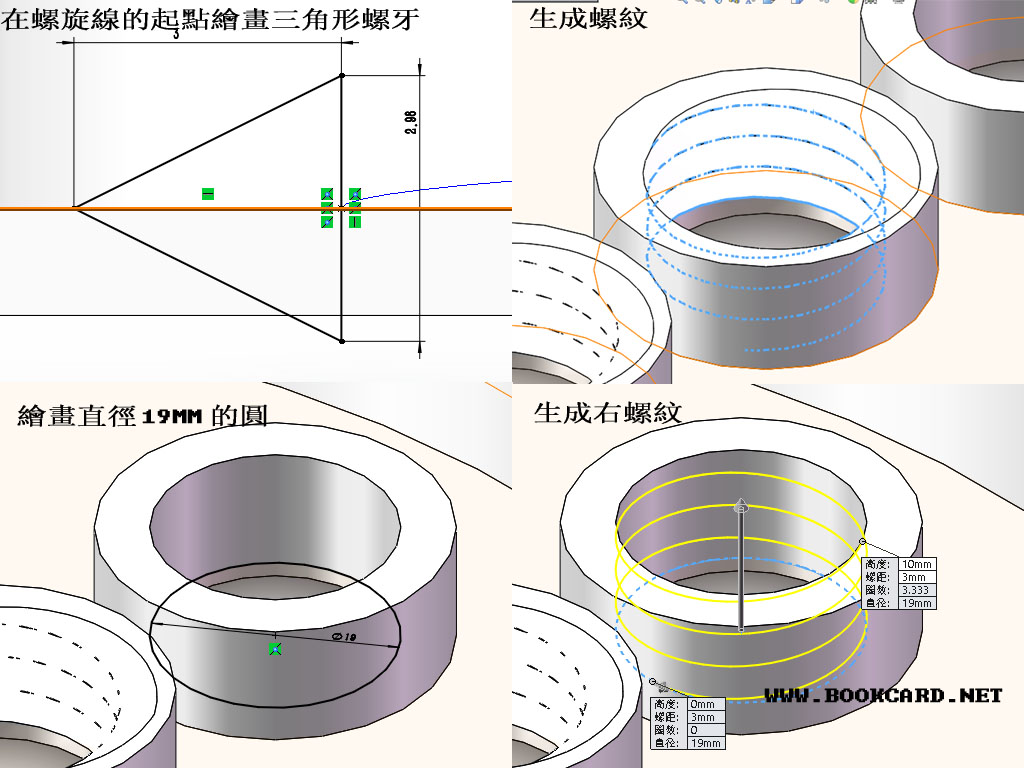
6.繪畫一個直徑19MM的圓.退出草圖.
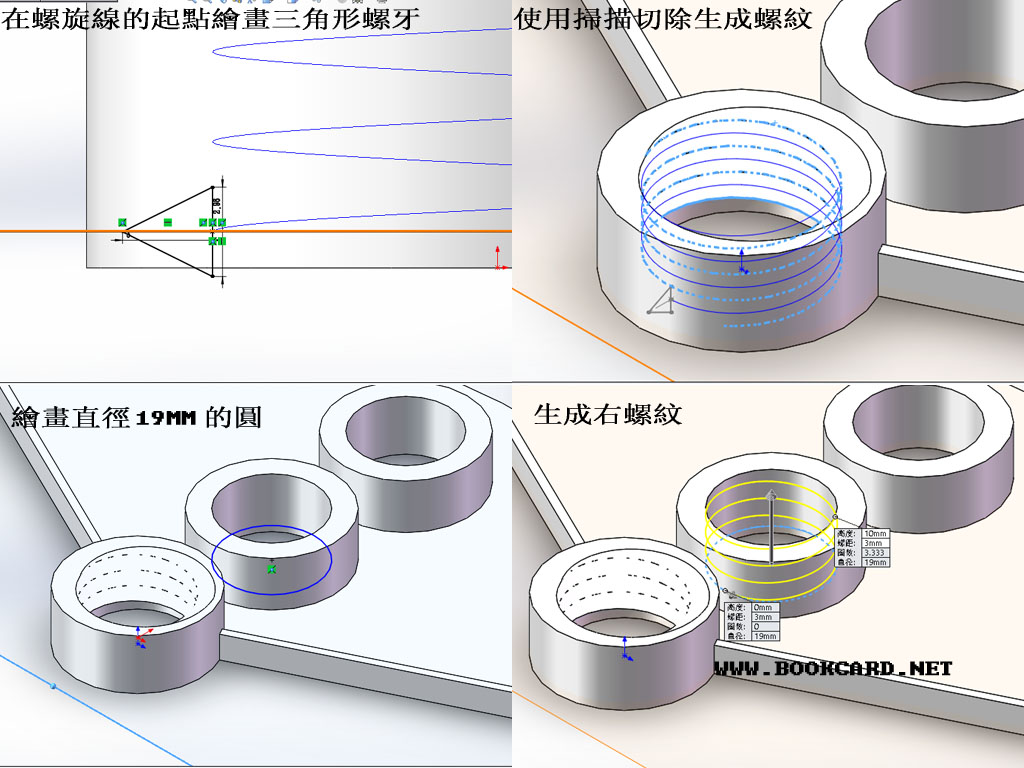
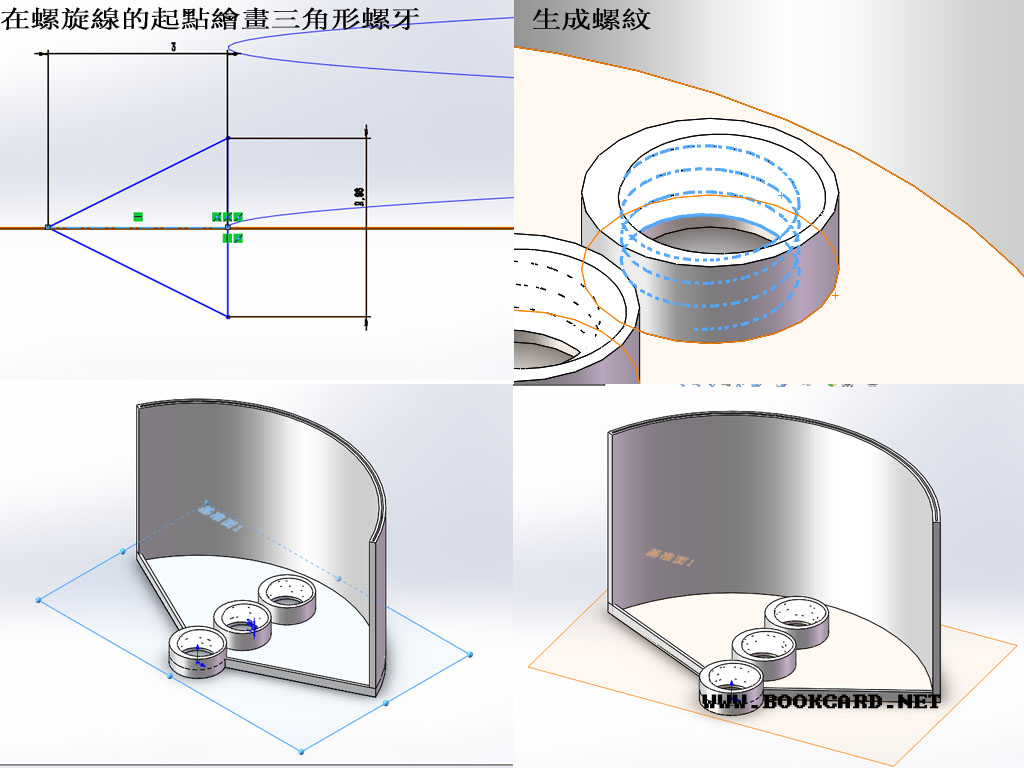
7.使用”螺旋線”工具以19MM的圓草圖生成螺旋線,定義方式選擇”高度和螺距”,勾選”恒定螺距”,高度填10MM,螺距填3MM,起此角度0,勾選”逆時針”,生成右螺紋.
7選擇”右視基準面”做為草繪平面.進入”草圖模式”
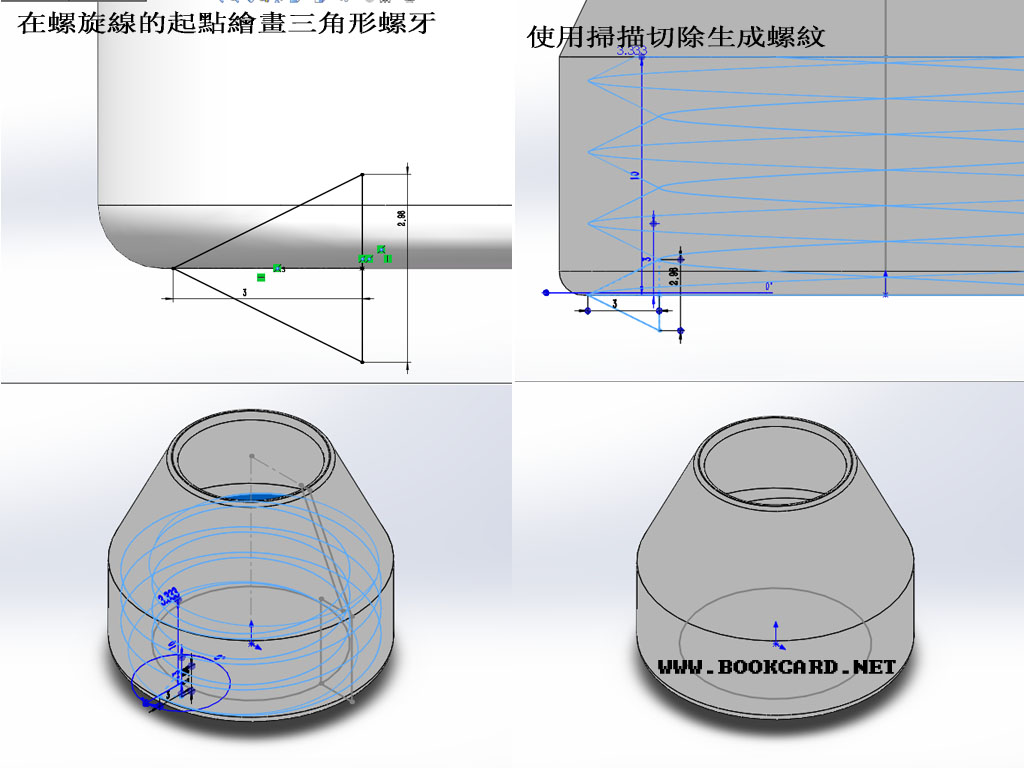
8在”螺旋線”的起點繪畫三角形”螺牙”,高2.98MM,長3MM.退出草圖模式
9使用”掃描切除”生成輪廓選擇”螺牙”,路徑選擇螺紋線.按確定生成螺紋
WIFI增幅器天線夾部份
1.新建零件模型
2.選擇”上視基準面”做為草繪平面.進入草圖模式
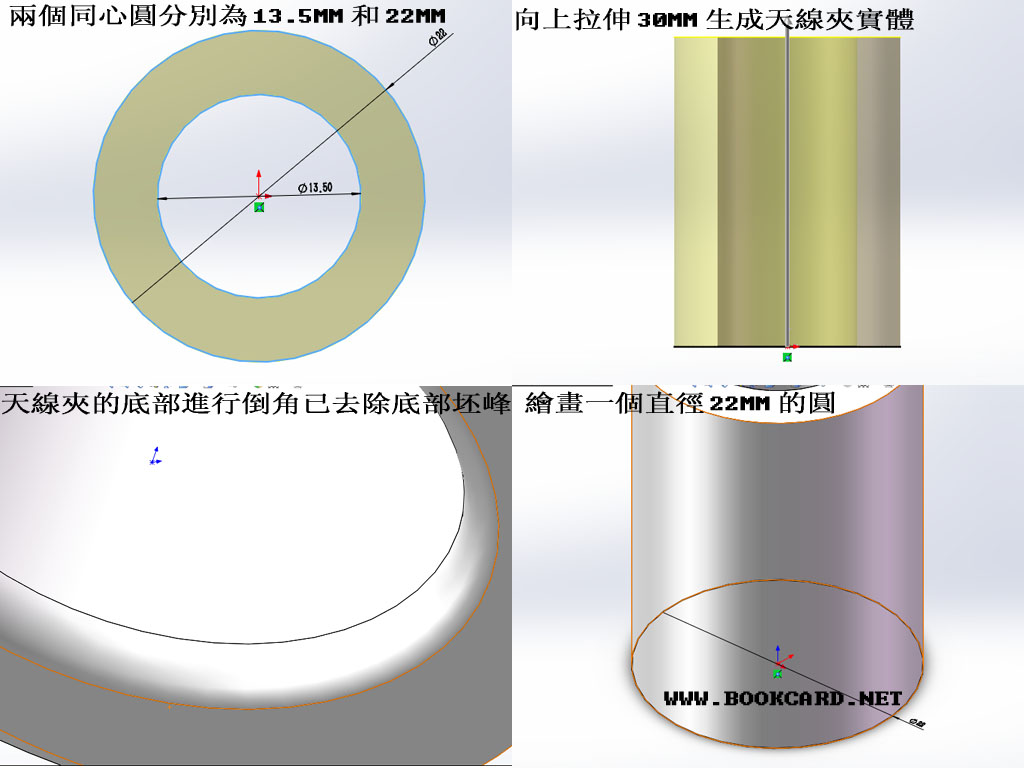
3.在原心點畫兩個同心圓分別為13.5MM和22MM,退出草圖.
4.向上拉伸30MM生成天線夾實體.
5.天線夾的底部進行倒角已去除底部坯峰.,大約1MM即可
6.選擇”上視基準面”做為草繪平面.進入草圖模式
7.繪畫一個直徑22MM的圓.退出草圖.
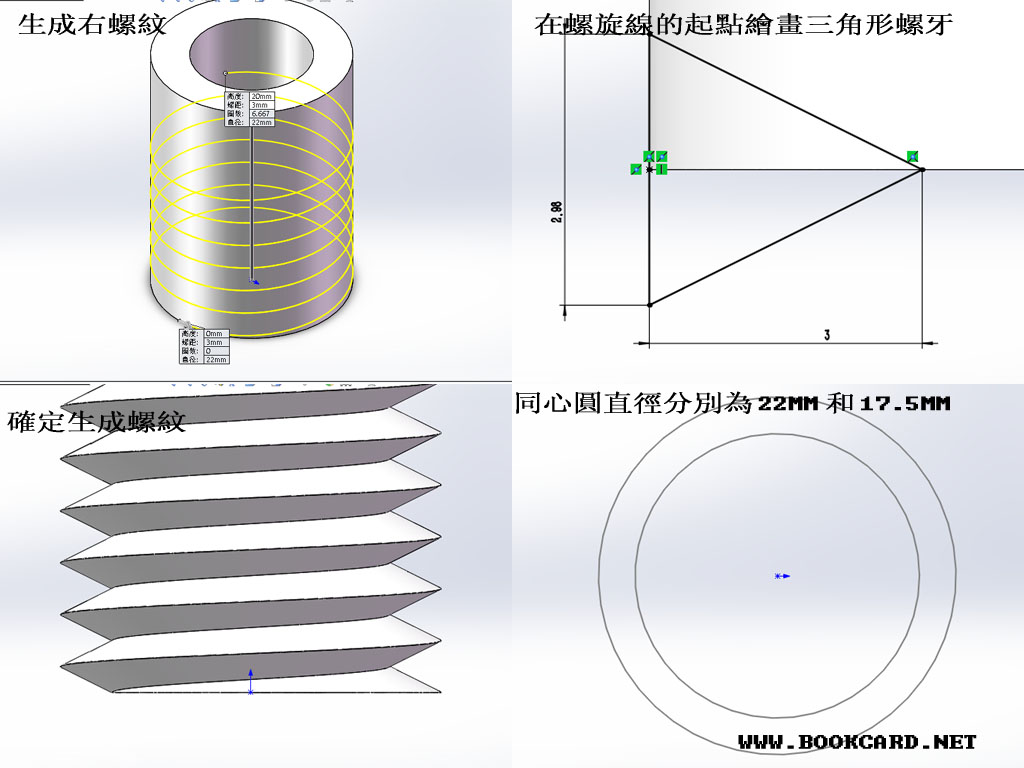
8.使用”螺旋線”工具以19MM的圓草圖生成螺旋線,定義方式選擇”高度和螺距”,勾選”恒定螺距”,高度填10MM,螺距填3MM,起此角度0,勾選”逆時針”,生成右螺紋.
8.選擇”右視基準面”做為草繪平面.進入”草圖模式”
9.在”螺旋線”的起點繪畫三角形”螺牙”,高2.98MM,長3MM.退出草圖模式
10.使用”掃描切除”生成輪廓選擇”螺牙”,路徑選擇螺紋線.按確定生成螺紋
11.在”天線夾”頂端繪畫兩個同心圓直徑分別為22MM和17.5MM退出草圖
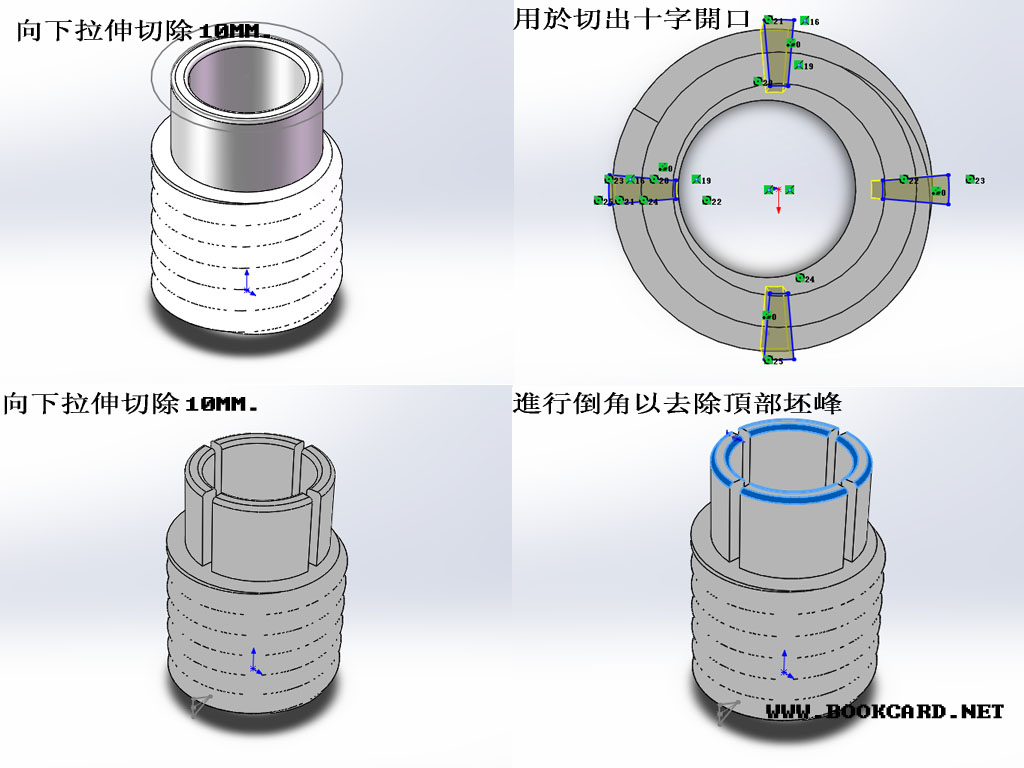
12.向下拉伸切除10MM.
13.在”天線夾”頂端繪畫兩個同心圓直徑分別為13.5MM和22MM,然後再繪畫十字線,然後使用裁剪工具十字矩形,用於切出十字開口,退出草圖
12.向下拉伸切除10MM.
13.天線夾的頂部進行倒角以去除頂部坯峰.大約0.5MM即可
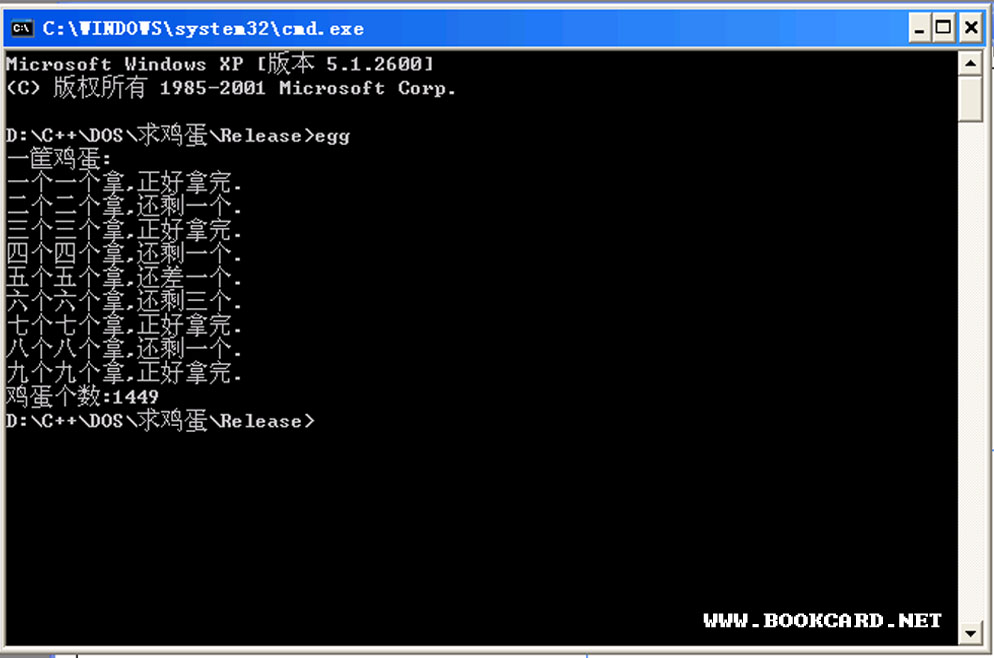
今日見老豆在看微信,而且不停的在紙上寫數位並按計算機,原來是三舅父群裏發了一條數學題,這是條數學題求筐裏雞蛋的個數,我一口答應由我來算,題目我在下面給出,這種題目非常適合使用電腦進行碰撞求結果.常細的C語言演算法我在下面給出,演算法思路就是雞蛋個數逐次加一,所有條件都附合就得出接果,我果台老爺機IBM-T60P瞬間就給我答案1449,我將結果告訴我老豆他立馬發上群威一威.
一筐雞蛋:求筐裏雞蛋的個數
一個一個拿,正好拿完.
二個二個拿,還剩一個.
三個三個拿,正好拿完.
四個四個拿,還剩一個.
五個五個拿,還差一個.
六個六個拿,還剩三個.
七個七個拿,正好拿完.
八個八個拿,還剩一個.
九個九個拿,正好拿完.
//——————————————————————–
//一筐雞蛋
//——————————————————————–
int egg()
{
int x[9];
int _x;// 雞蛋個數
int c;//拿蛋的次數
_x = 0;// 雞蛋個數
while(1)
{
++_x;// 雞蛋個數加一
for(c = 0; 1c <= _x; ++c)
x[0] = 1c;
for(c = 0; 2c+1 <= _x; ++c)
x[1] = 2c+1;
for(c = 0; 3c <= _x; ++c)
x[2] = 3c;
for(c = 0; 4c+1 <= _x; ++c)
x[3] = 4c+1;
for(c = 0; 5c-1 <= _x; ++c)
x[4] = 5c-1;
for(c = 0; 6c+3 <= _x; ++c)
x[5] = 6c+3;
for(c = 0; 7c <= _x; ++c)
x[6] = 7c;
for(c = 0; 8c+1 <= _x; ++c)
x[7] = 8c+1;
for(c = 0; 9c <= _x; ++c)
x[8] = 9c;
if(_x == x[0] &&
_x == x[1] &&
_x == x[2] &&
_x == x[3] &&
_x == x[4] &&
_x == x[5] &&
_x == x[6] &&
_x == x[7] &&
_x == x[8] )
break;
}
return _x;
}
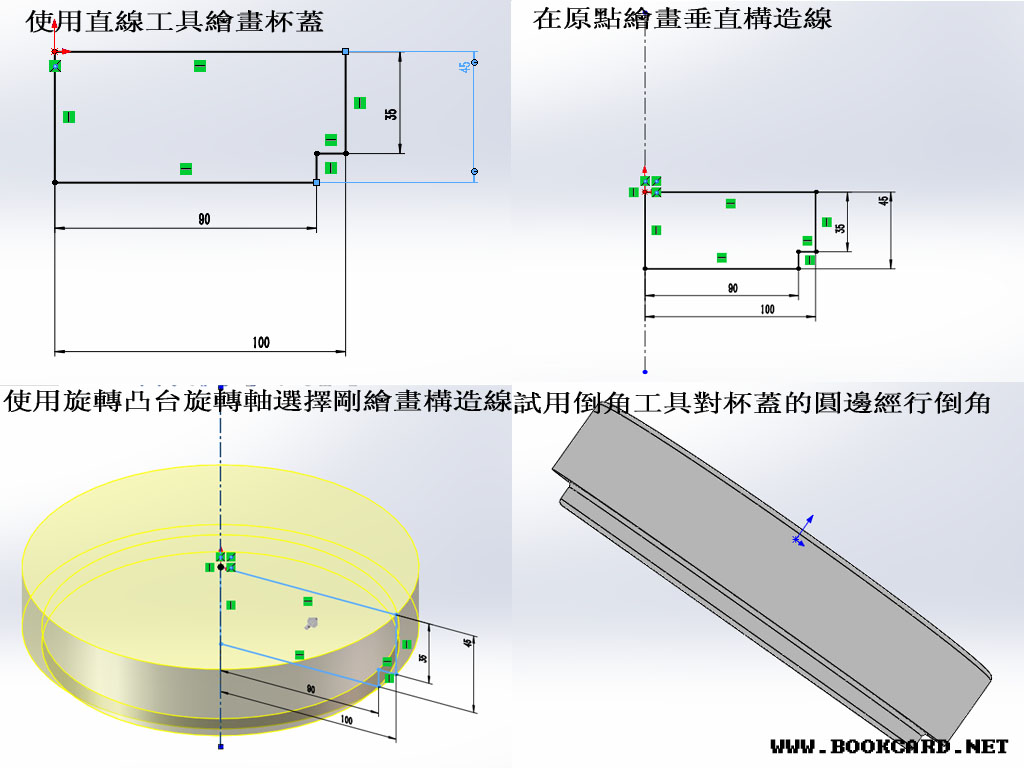
SOLIDWORKS 製作杯蓋3D模型
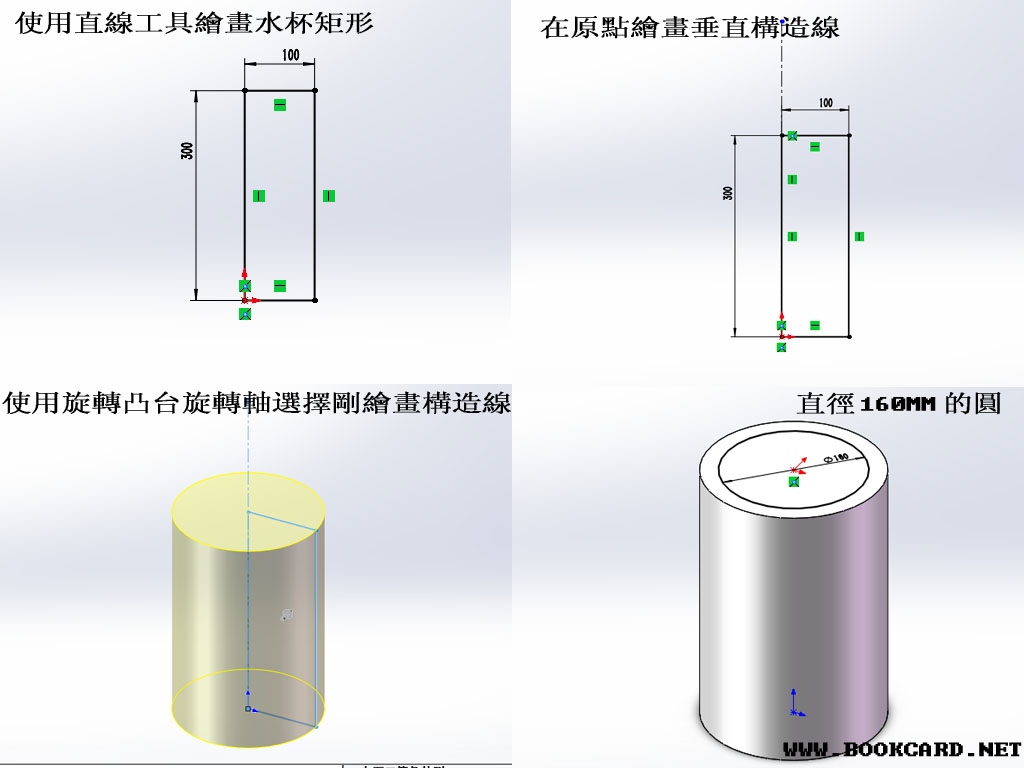
SOLIDWORKS 製作水蓋3D模型
1.新建零件模型
2.選擇”前視基準面”做為草繪平面.進入草圖模式
3.使用”直線”工具繪畫水杯矩形,寬100MM,高300MM
4.在原點繪畫垂直”構造線”
5.使用”旋轉凸台”旋轉軸選擇剛繪畫”構造線”
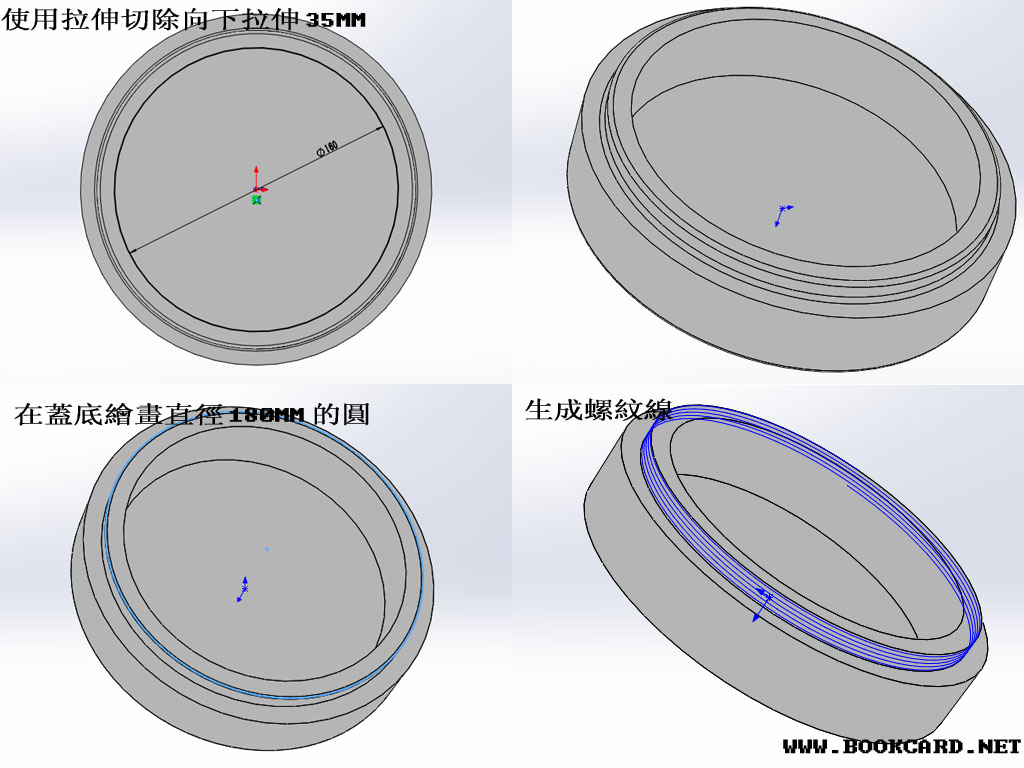
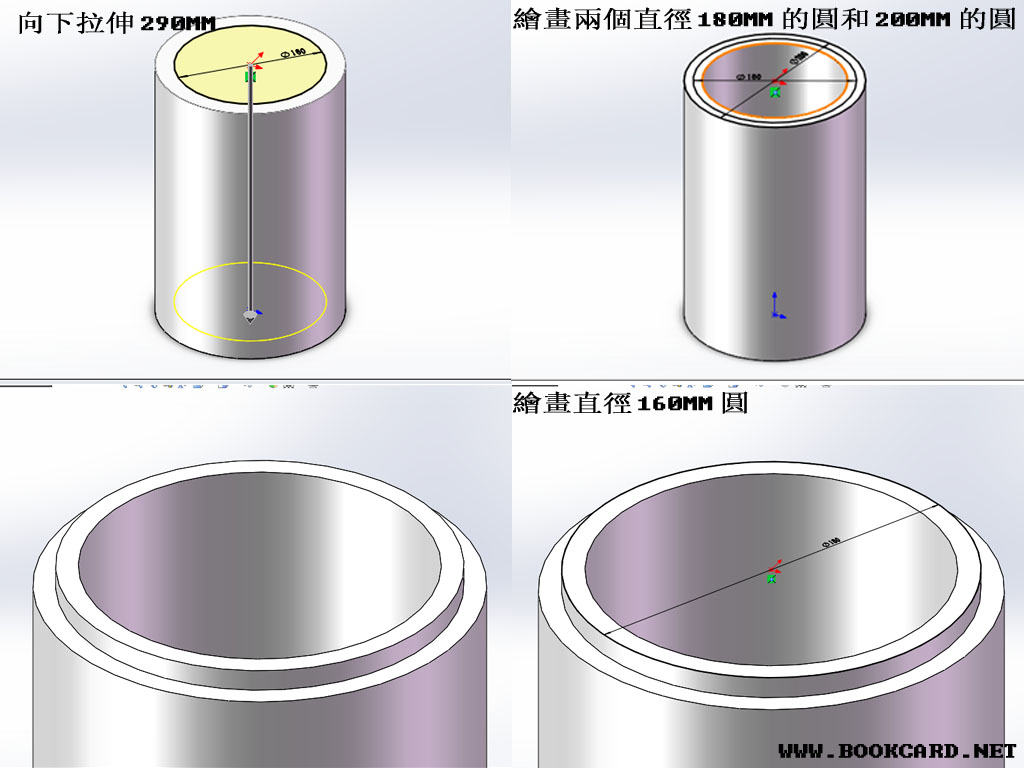
6.使用”拉伸切除”,進入草圖模式在杯頂繪畫一個直徑160MM的圓,退出草圖模式向下拉伸290MM
7.使用”拉伸切除”,進入草圖模式在杯頂繪畫兩個直徑分別180MM的圓和200MM的圓. ,退出草圖模式向下拉伸10MM
6.進入草圖模式在杯頂繪畫一個直徑160MM,退出草圖
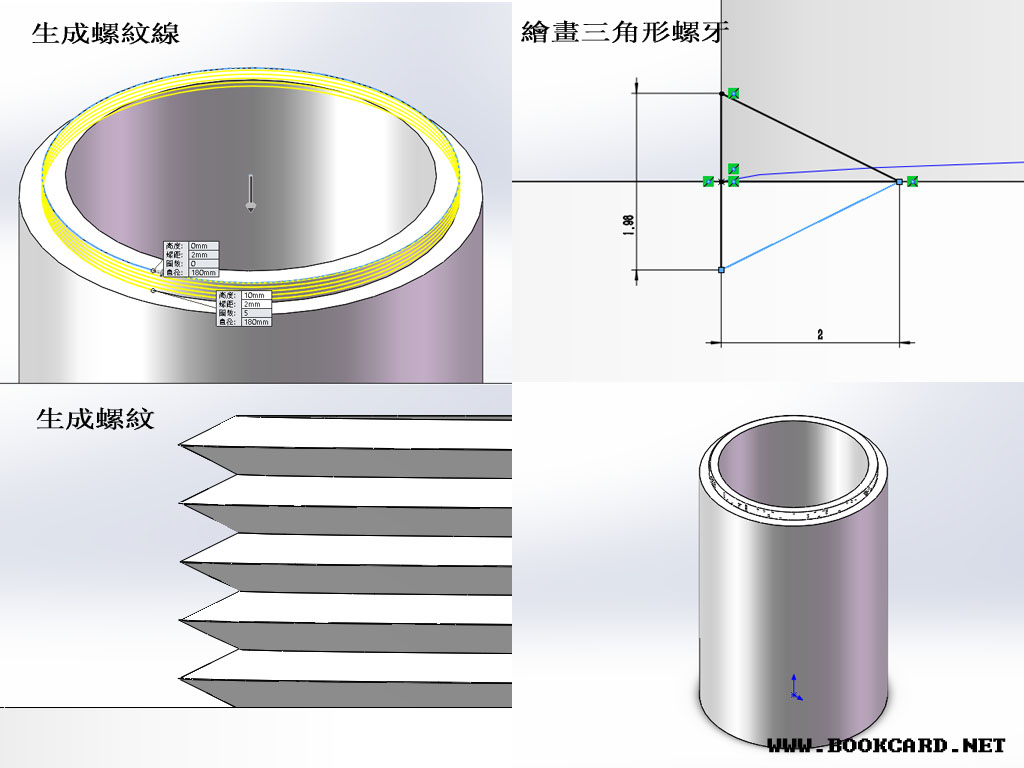
7.使用”旋轉線”工具,定義方式選擇”高度和螺距”,勾選”恒定螺距”,高度10MM,螺鋸2MM,起始角度0,勾選”逆時針”,生成螺紋線
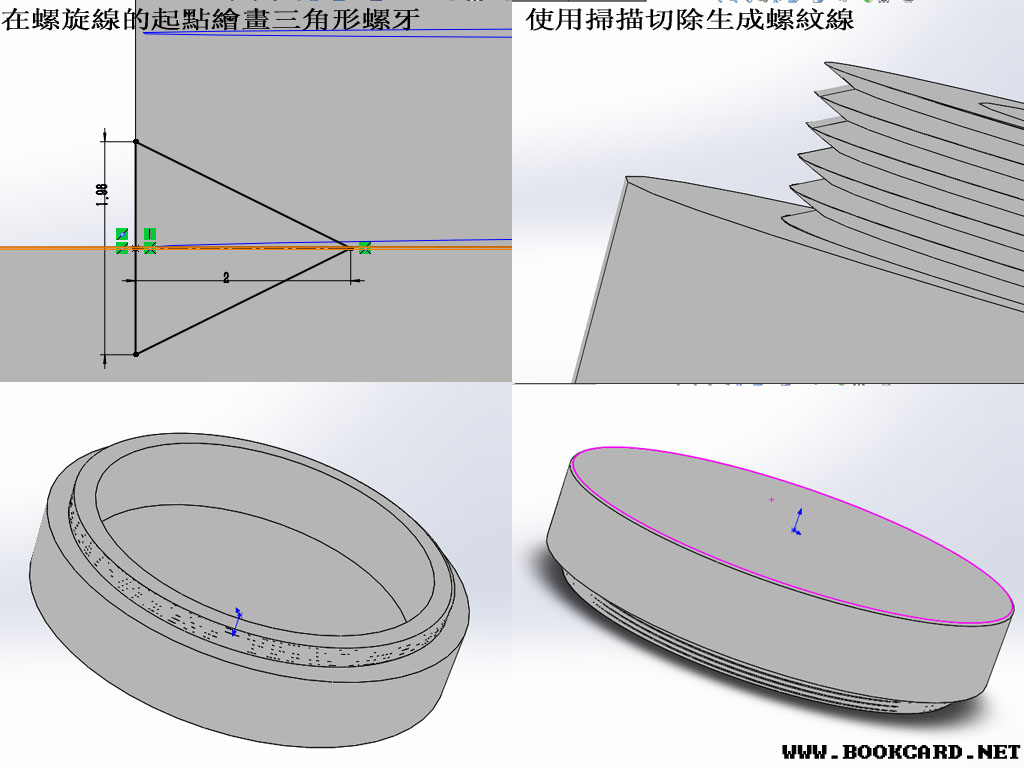
8.選擇”右視基準面”做為草繪平面.進入”草圖模式”
9.在”螺旋線”的起點繪畫三角形”螺牙”,高1.98MM,長2MM.退出草圖模式
10.使用”掃描切除”生成輪廓選擇”螺牙”,路徑選擇螺紋線.按確定生成螺紋
不過這套杯尺寸太大,我的3D打印機打不出,我會在設計套小點的.
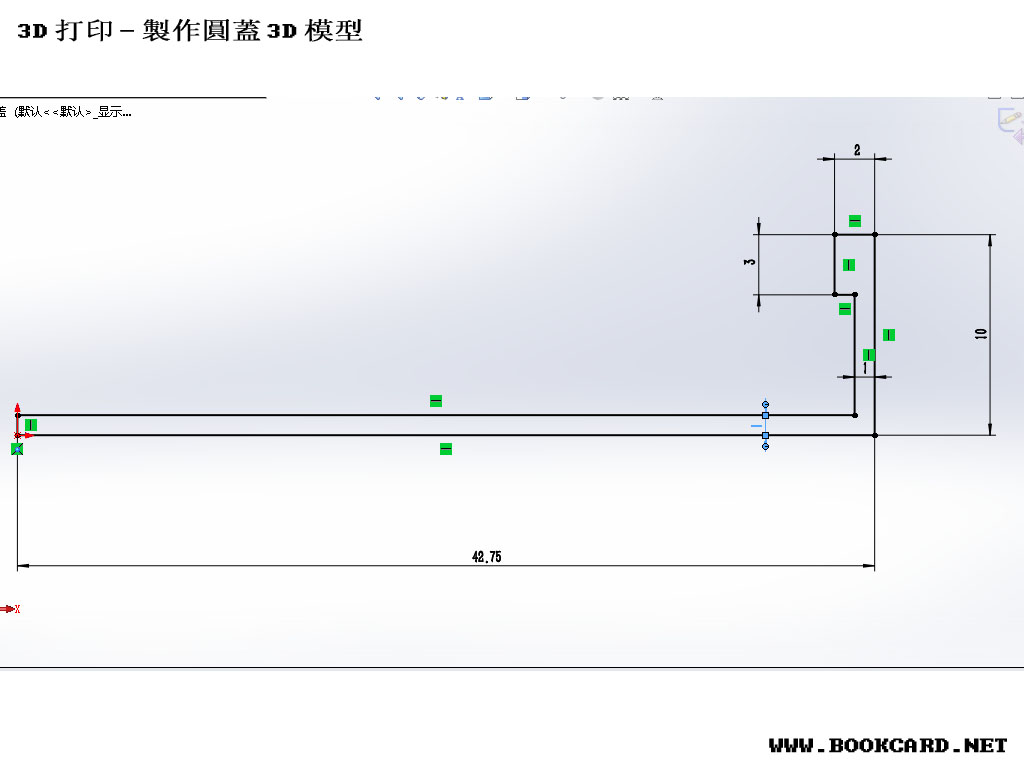
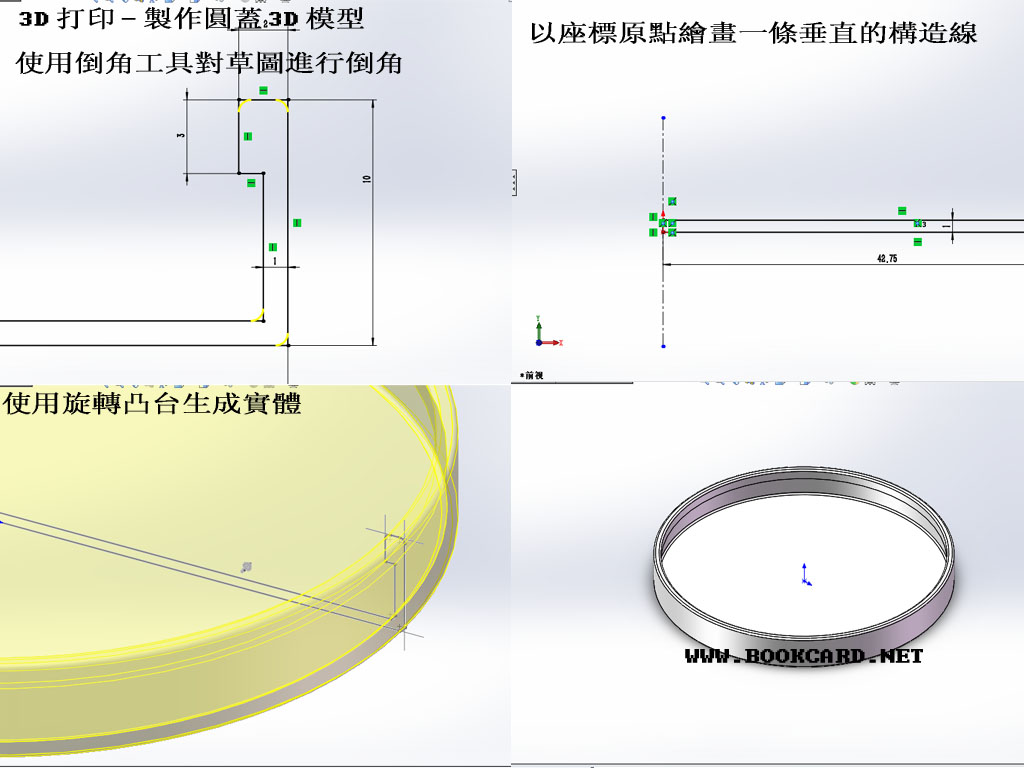

SOLIDWORKS製作圓蓋3D模型,我需要一個錫盤的圓蓋.這是3D打印機的強項
打印這種圓蓋不應使用硬塑而應使用軟塑.使用並不方便.
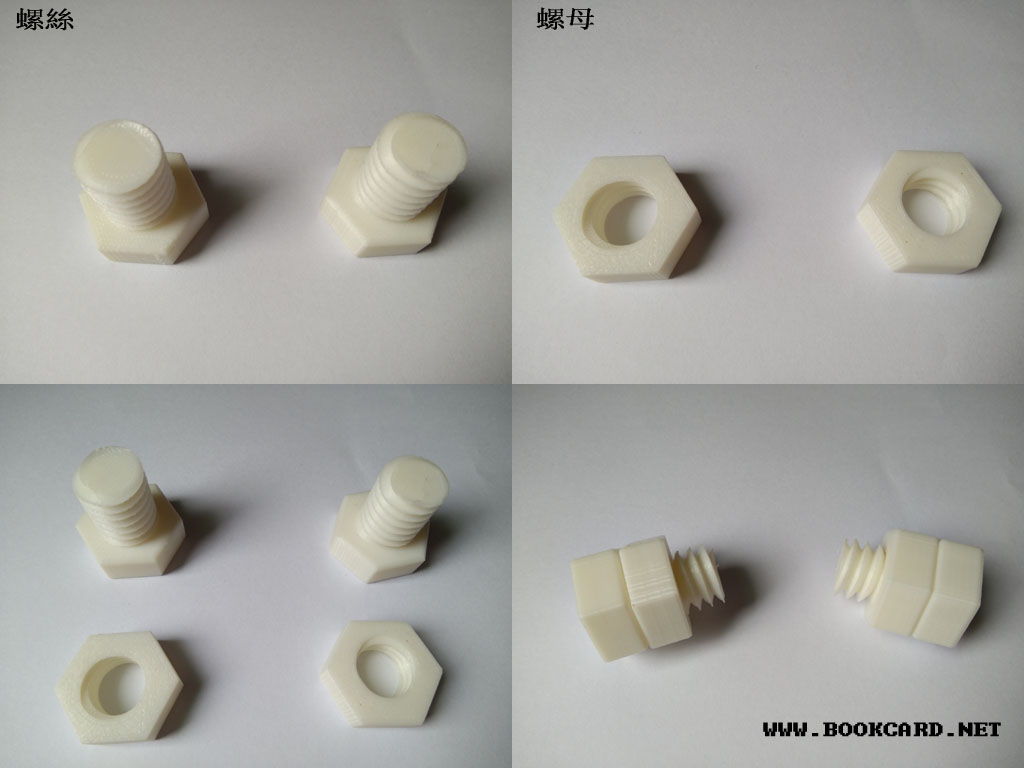
SOLIDWORKS製作螺絲螺母模型,家用的3D打印機的螺距不能太小,我這裏生成右螺紋.螺母與螺絲的間隙匹配旋渦的時力度剛剛好.
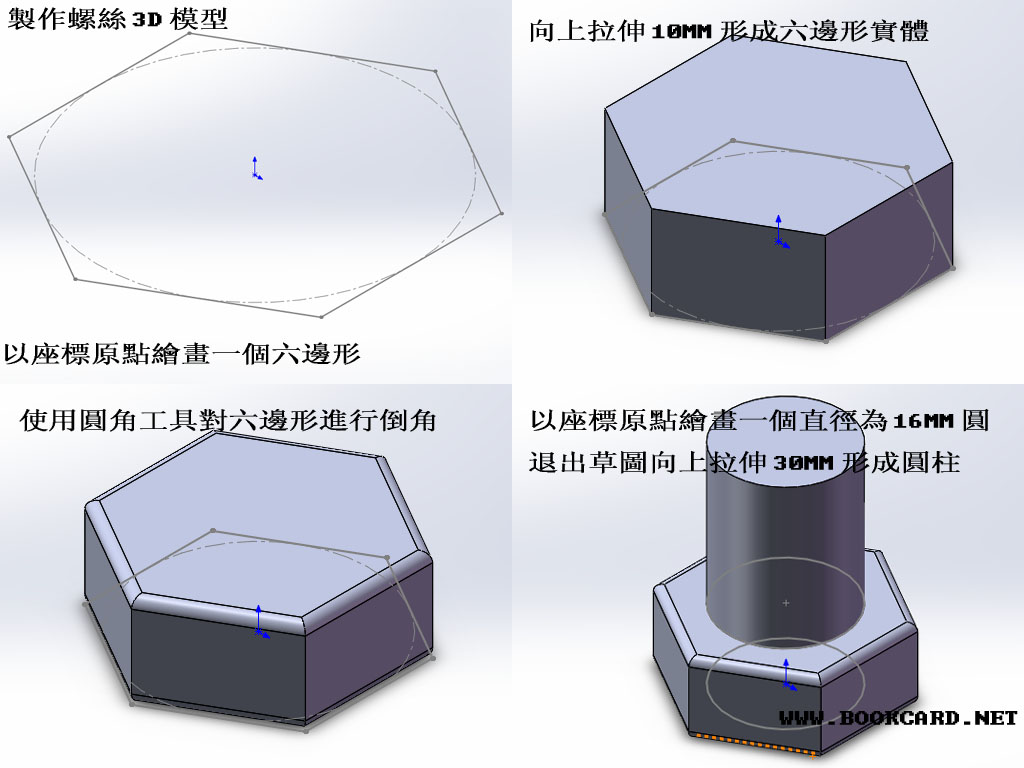
製作螺絲3D模型
1. 新建零件模型
2. 選擇”上視基準面”做為草繪平面.進入”草圖模式”
3. 以座標原點繪畫一個六邊形,圓直徑為24MM,邊數為6,選擇”外切圓”
4. 退出草圖向上拉伸10MM形成六邊形實體
5. 使用”圓角”工具對六邊形進行倒角
6. 選擇”上視基準面”做為草繪平面.進入”草圖模式”
7. 以座標原點繪畫一個直徑為16MM圓
8. 退出草圖向上拉伸30MM形成圓柱
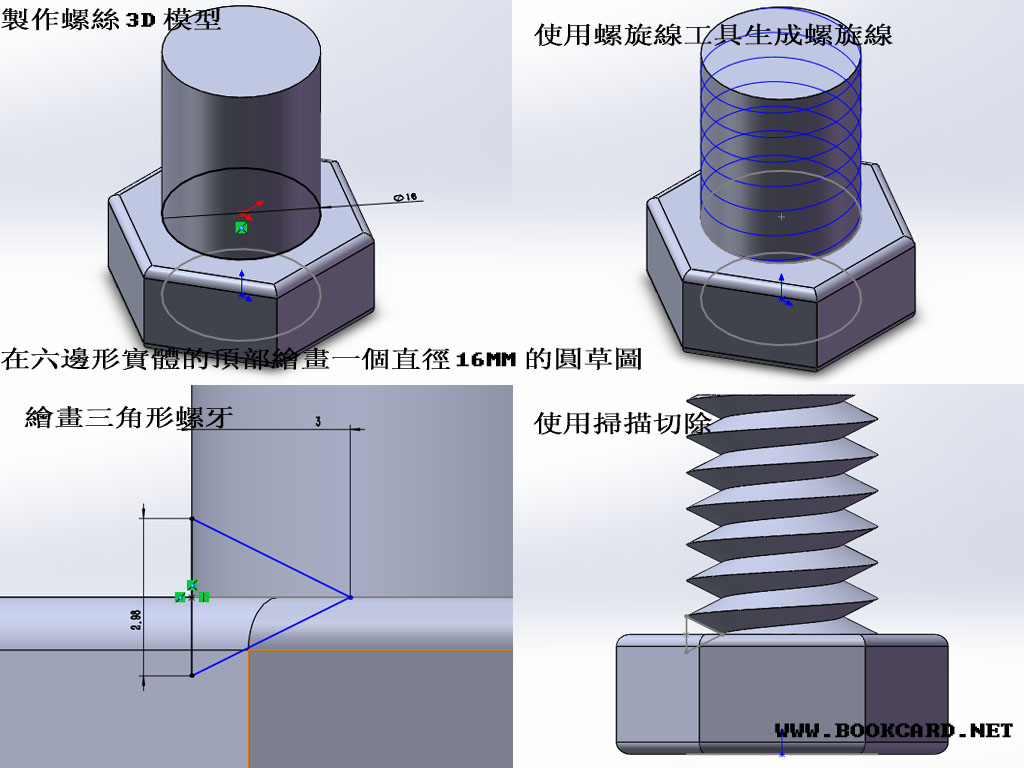
9. “繪畫草圖”進入草圖模式,在六邊形實體的頂部繪畫一個直徑16MM的圓草圖
10. 使用”螺旋線”工具以16MM的圓草圖生成螺旋線,定義方式選擇”高度和螺距”,勾選”恒定螺距”,高度填20MM,螺距填3MM,起此角度0,勾選”逆時針”,生成右螺紋.
11. 選擇”右視基準面”做為草繪平面.進入”草圖模式”
12. 在”螺旋線”的起點繪畫三角形”螺牙”,高2.98MM,長3MM.退出草圖模式
13. 使用”掃描切除”生成輪廓選擇”螺牙”,路徑選擇螺紋線.按確定生成螺紋
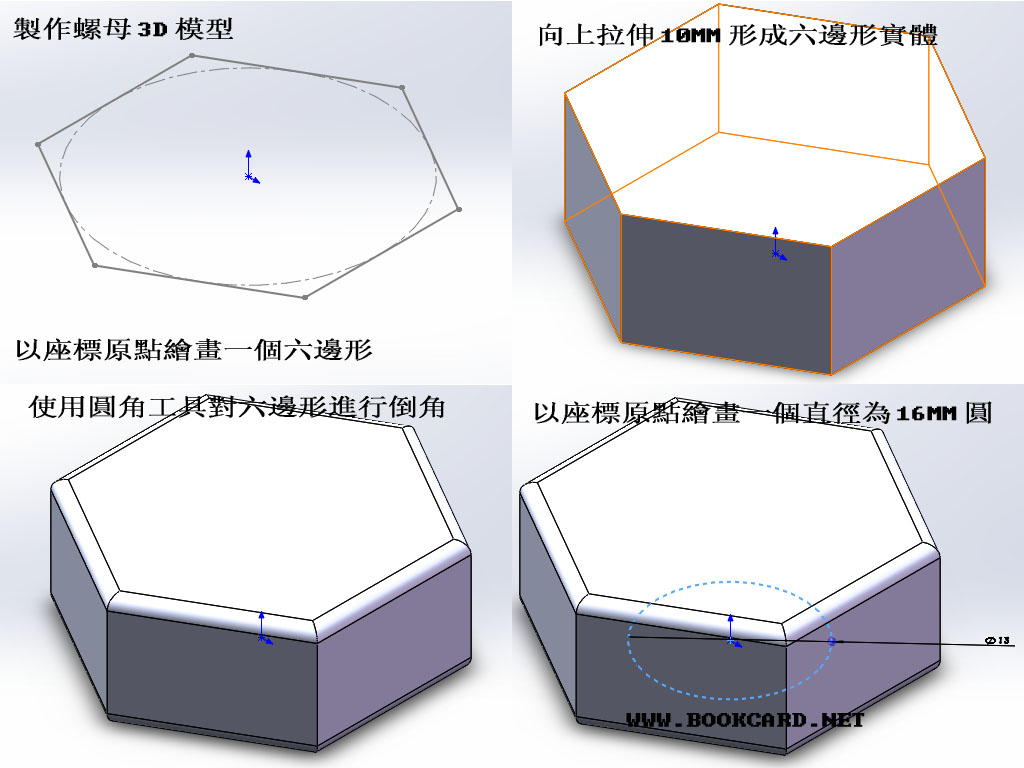
製作螺母3D模型
1. 新建零件模型
2. 選擇”上視基準面”做為草繪平面.進入”草圖模式”
3. 以座標原點繪畫一個六邊形,圓直徑為24MM,邊數為6,選擇”外切圓”
4. 退出草圖向上拉伸10MM形成六邊形實體
5. 使用”圓角”工具對六邊形進行倒角
6. 選擇”上視基準面”做為草繪平面.進入”草圖模式”
7. 以座標原點繪畫一個直徑為16MM圓
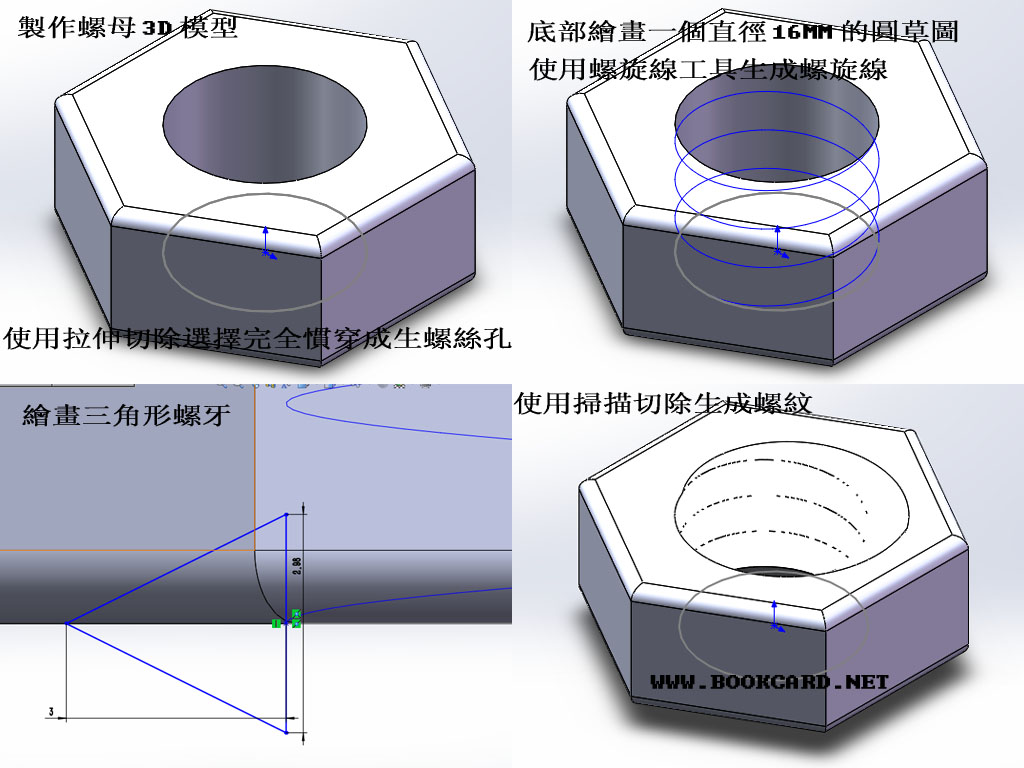
8. 使用”拉伸切除”選擇完全慣穿成生螺絲孔.
9. 選擇”上視基準面”做為草繪平面.進入”草圖模式”,在六邊形實體的底部繪畫一個直徑16MM的圓草圖
10. 使用”螺旋線”工具以16MM的圓草圖生成螺旋線,定義方式選擇”高度和螺距”,勾選”恒定螺距”,高度填10MM,螺距填3MM,起此角度0,勾選”逆時針”,生成右螺紋.
11. 選擇”右視基準面”做為草繪平面.進入”草圖模式”
12. 在”螺旋線”的起點繪畫三角形”螺牙”,高2.98MM,長3MM.退出草圖模式
13. 使用”掃描切除”輪廓選擇”螺牙”,路徑選擇螺紋線.按確定生成螺紋
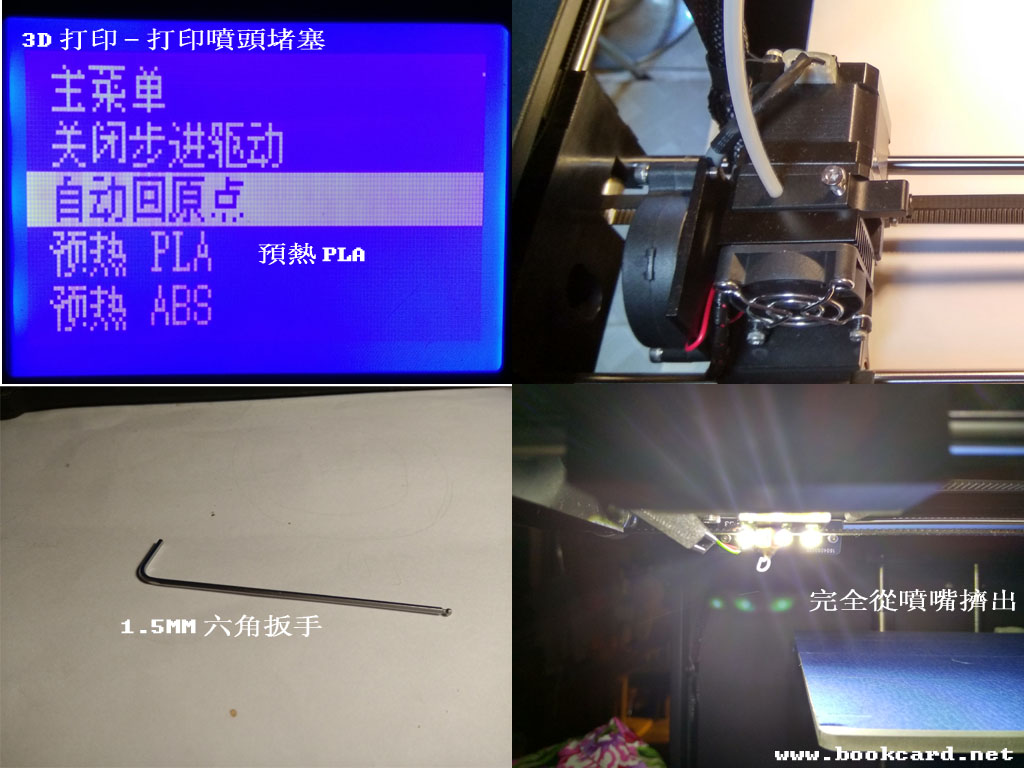
3D打印機的打印噴頭很容易堵塞,如果不將堵塞的耗材擠出,是不能打印的,你需要準備一根直徑約1.5MM圈柱形工具,我這裏使用1.5MM的六角扳手,要預熱打印頭,如果是PLA就選擇”預熱PLA”否擇選擇”預熱ABS”,等待噴頭溫度升高後,向下壓壓緊塊,將六角扳手長的一端插入導料孔並向下擠壓,直到殘除的耗材完全從噴嘴擠出.
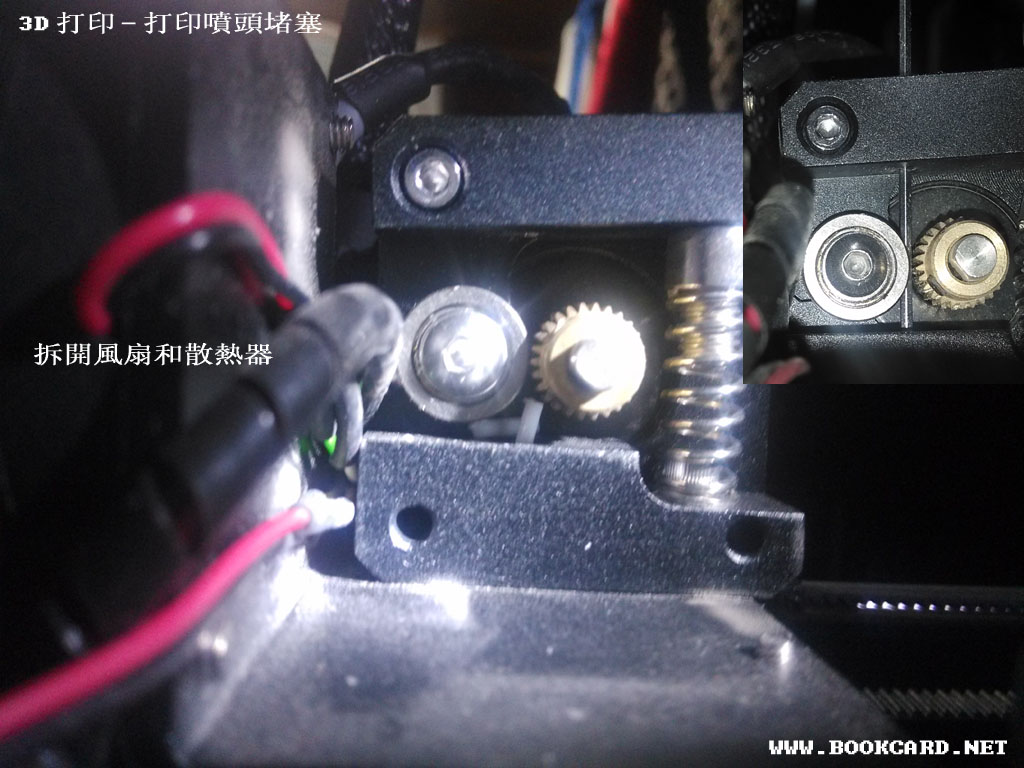
如果耗材斷在噴頭裏,則需要先拆開風扇和散熱器預熱後用夾子夾出.或用六角扳手壓出.
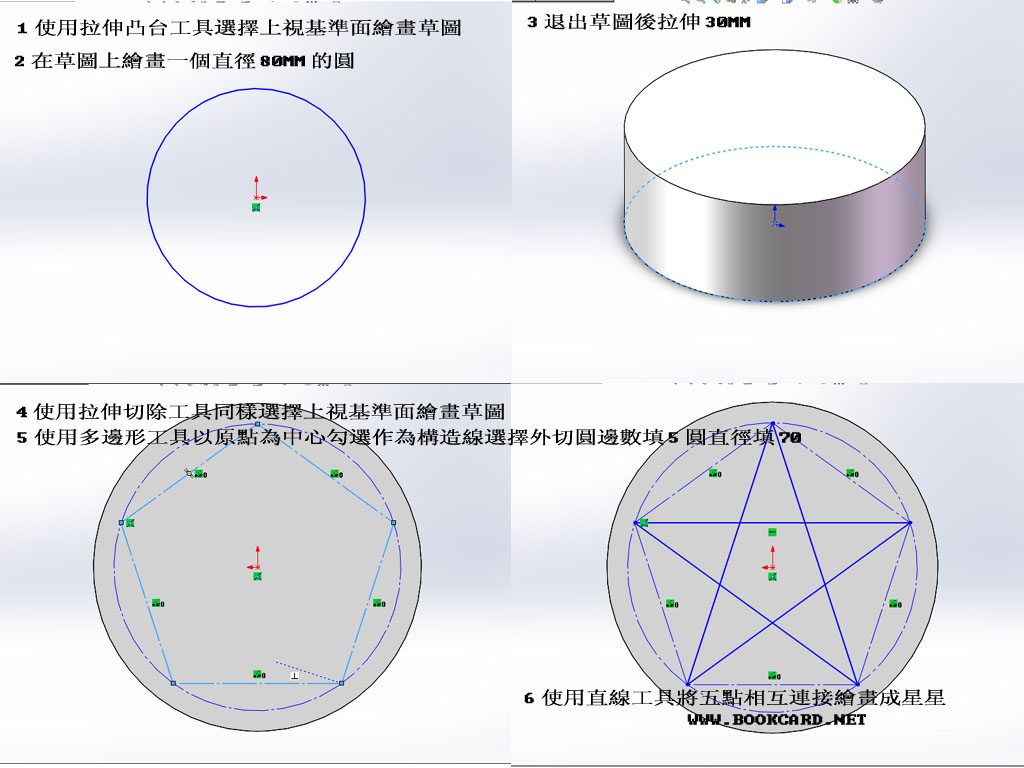
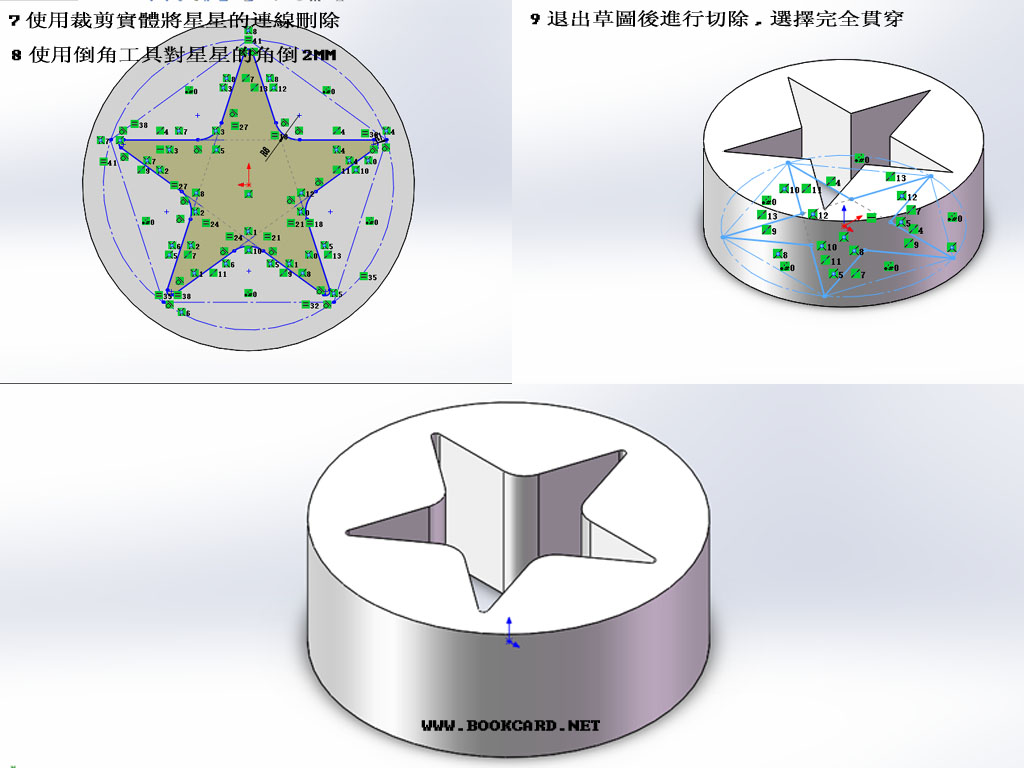
倒模模具日常生活很有實用價值,但是有些特別的形狀只能定制,而3D列印就可以幫助你快速的模具製作,下面這個教程以星星作為例子
倒模模具完成,其他形狀的生成相似.

在網路上會有很多試用優惠的機會,而在蘇甯易購買的這款立體聲音樂耳機原價19元,試用優惠價只需6元,而且還未免運費,在街邊上買的耳機最偏宜也要10元,而且是簡包裝,而這款耳機軟塞套戴上去很舒服,因為耳機線在拉扯時會很容易扯斷,在貴也一樣的哦.

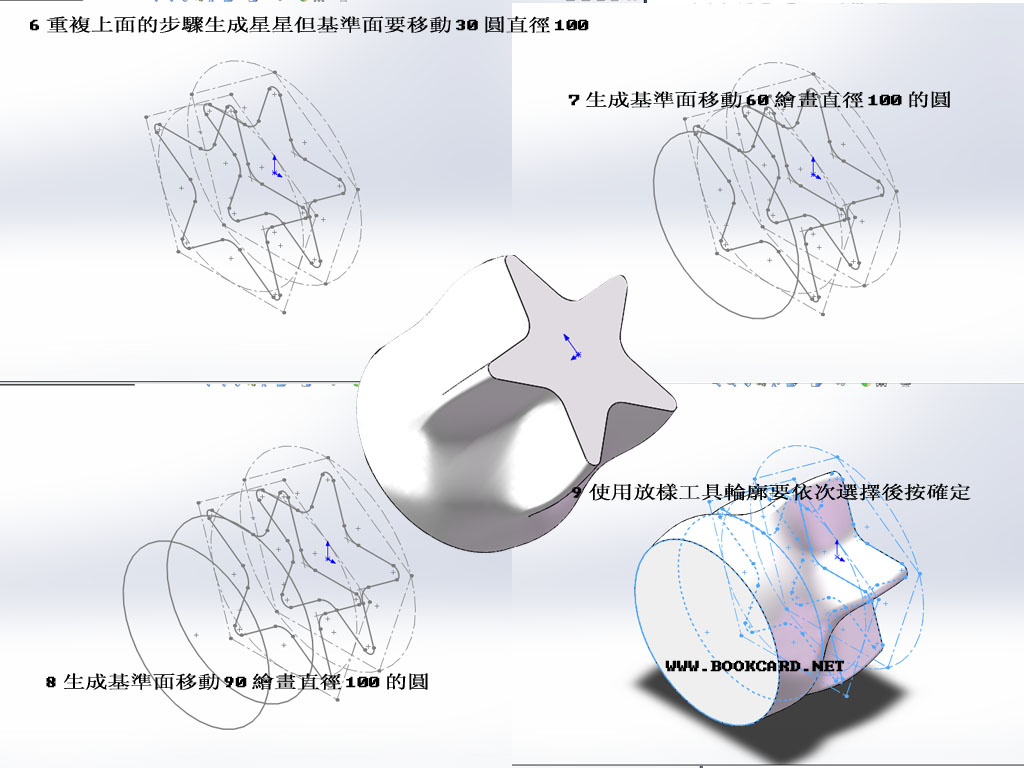
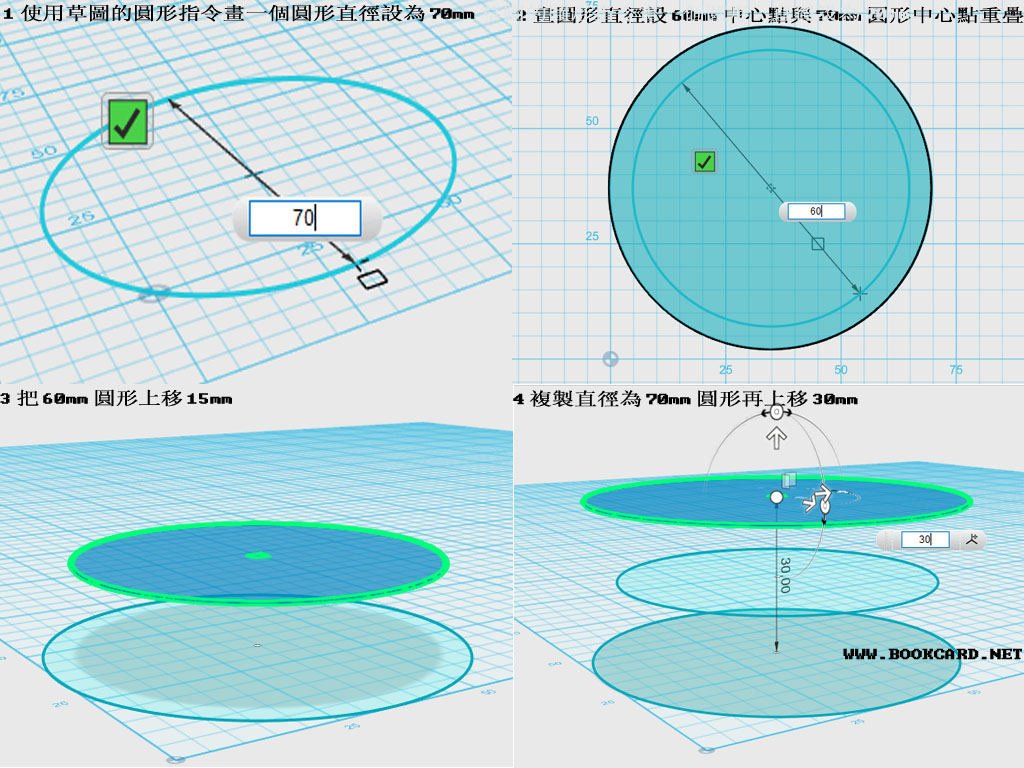
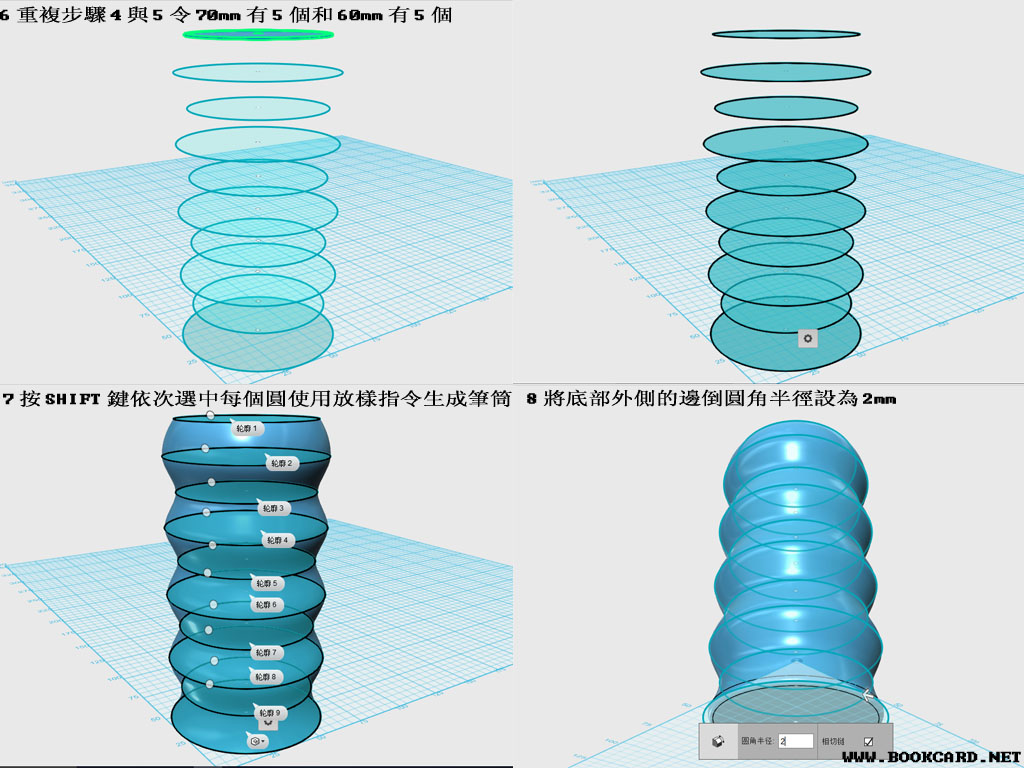
放樣是通過在輪廓之間生成特徵,放樣可以是基體,凸台,切除或曲面,也可以使用兩個或多個輪廓生成放樣,第一個和最後一個輪廓可以是點,也可兩個輪廓都是點.
使用”弧線”繪畫星星這樣會更好看

在網路上會有很多試用優惠,在蘇甯易購上這款多功能讀卡器原價19元,試用優惠只需8元,而且還未免運費,金士頓一款讀卡器則需要19元,如果品質可以的話性價比極高,支援多款SD記憶體卡.共有3個卡槽相容性強.
SD接口:SD/SDHC/SDXC/MMC II/RS MMC
TF接口:MicroSD/MicroSDCH/MicroSDXC
MS接口:MS Pro/MS Pro Duo/Ms Pro MG


因為本人的IBM-T60P是多年前在淘寶購買的二手貨,這台電腦已十幾年歷史,本應退役進入博物館安享晚年,可是本人饢中羞愧,拿不出錢購買新的電腦設備.其硬碟只有120GB所以想拆下原裝的DVD-ROM光碟機, 加裝光碟機硬碟托架後再買個1TB的希捷硬碟.
光碟機硬碟托架在蘇甯易購購入支援STAT3,安裝時其前面版無法安裝,因為IBM有個缺口位,硬碟也無法時別.硬碟是東芝移動固態硬碟,它有個三通道開關用於相容不同的電腦
左側A通道:惠普,索尼
中間B通道:戴爾,IBM
右側C通道:其他品牌
不幸的是三個通道都無法使用,電腦無法通過光碟機為升級硬碟.
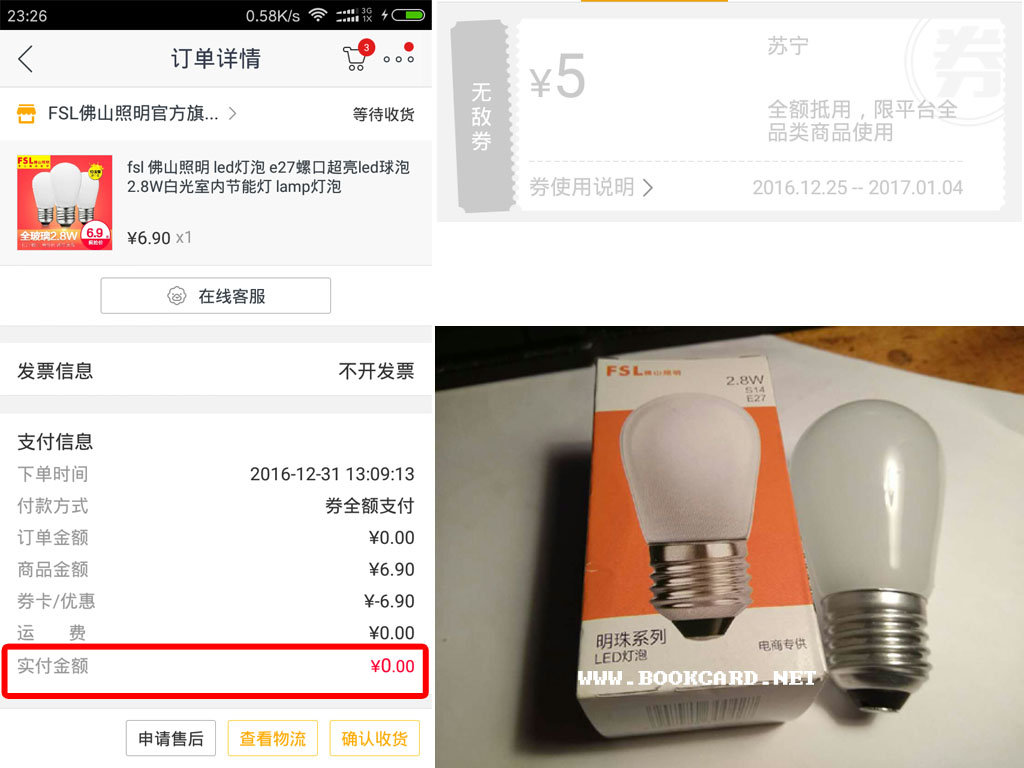
傳說中”免費午餐”出現了,我一分錢也沒有付出,在蘇甯易購就獲得了一個220V的E27螺頭LED燈泡,原價是6.9蚊,加一張5蚊優惠卷,乘下的1.9蚊由雲鑽支付.
LED燈還未收到,圖上實物是我上次購買的.
LED以收到,2016-12-31下單,2017-01-01到貨,快遞幾快的.
蘇甯易購經常有5蚊和10蚊的優惠倦,和每個月兩張5蚊快遞費.
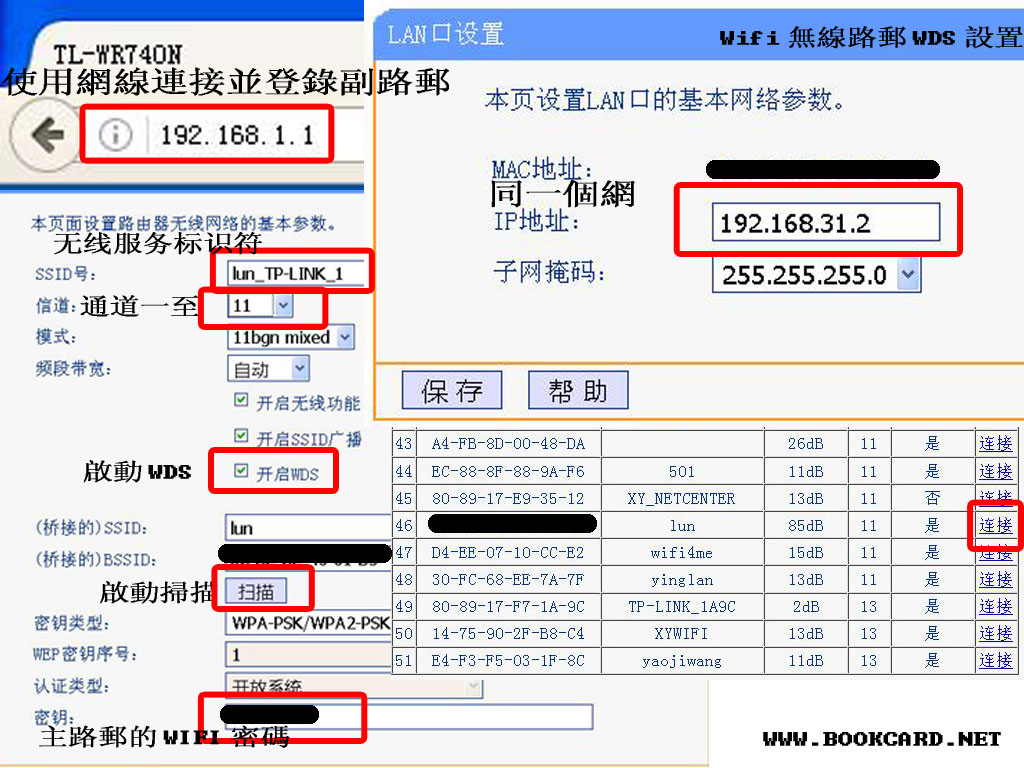
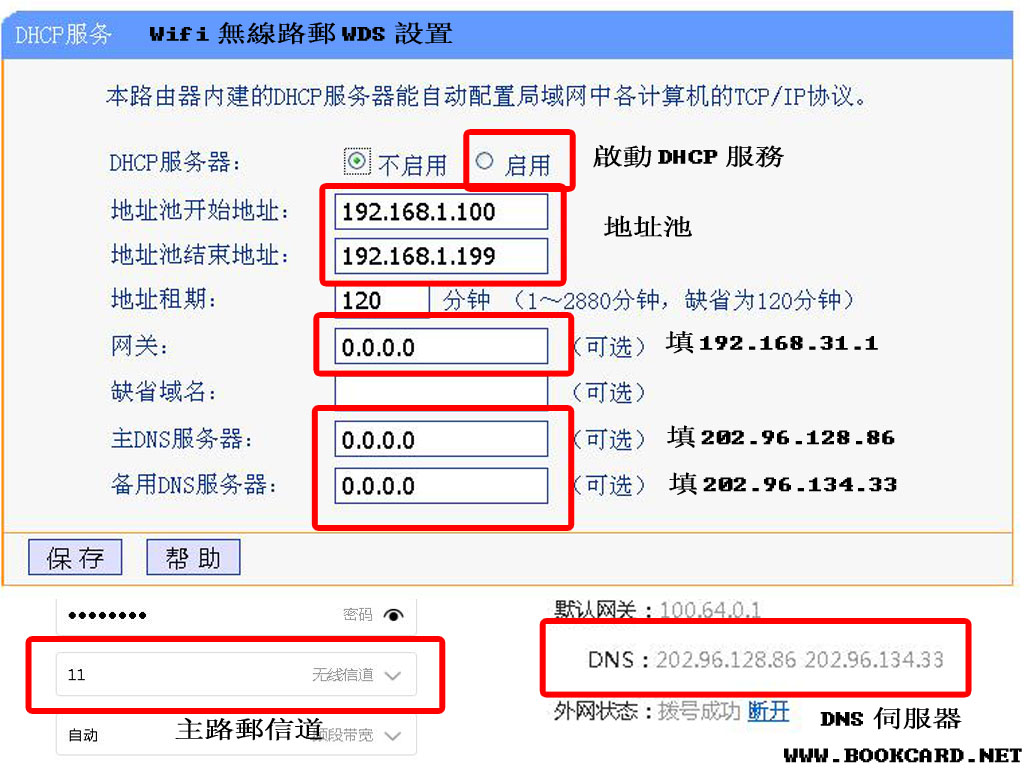

WDS即(Wireless Distribution System)無線分發系統,簡言之就是利用多個Wifi無線路郵擴大WIFI覆蓋範圍.
這套系統最小需要兩個Wifi無線路郵,主路郵連接调制解调器modem, 其他WIFI的作為副路郵需具有WDS功能,這裏使用小米WIFI作為主路郵,TP-LINE作位作為副路郵.
主WIFI路郵設置和一般的WIFI設置基本一樣,主要就是WDS工能的啟用設置.
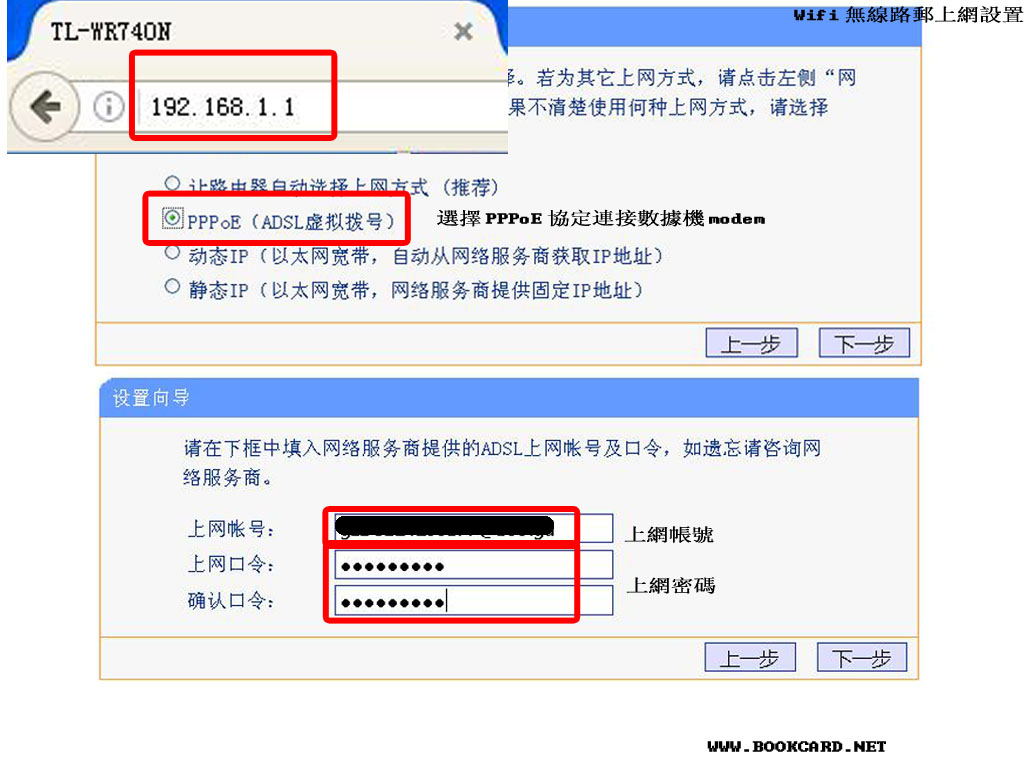
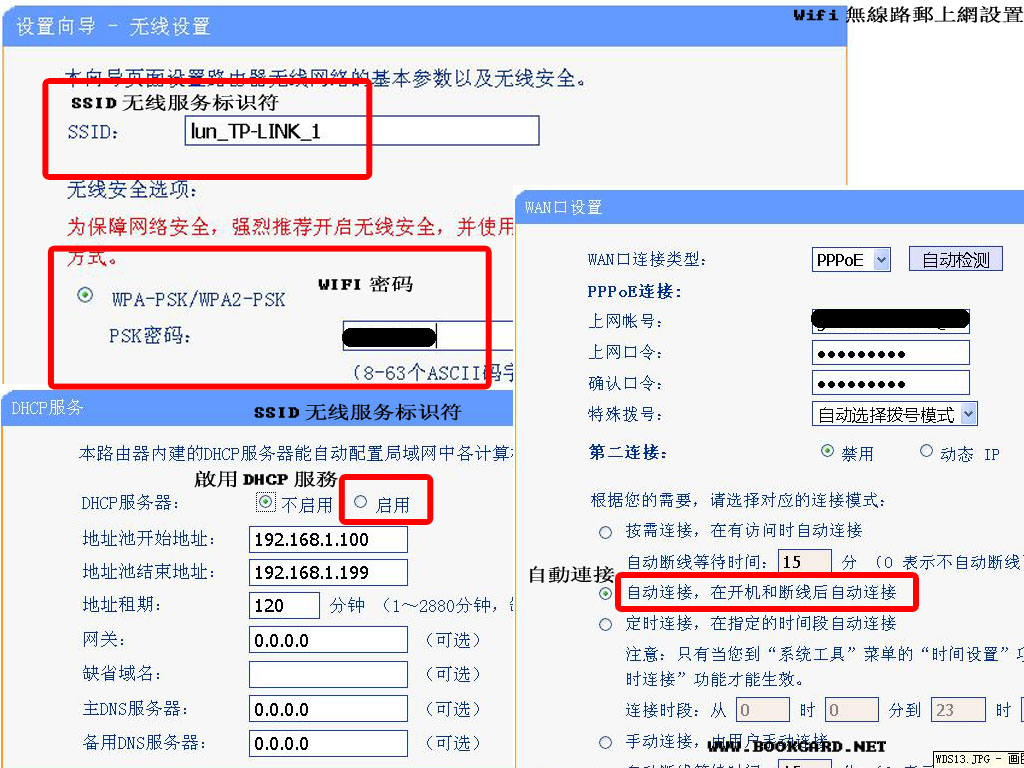
路郵的設置從古到今到差不多(有線路郵到無線路郵)只是多了個Wifi連接密碼,下面以TP-LINE無線路郵為例
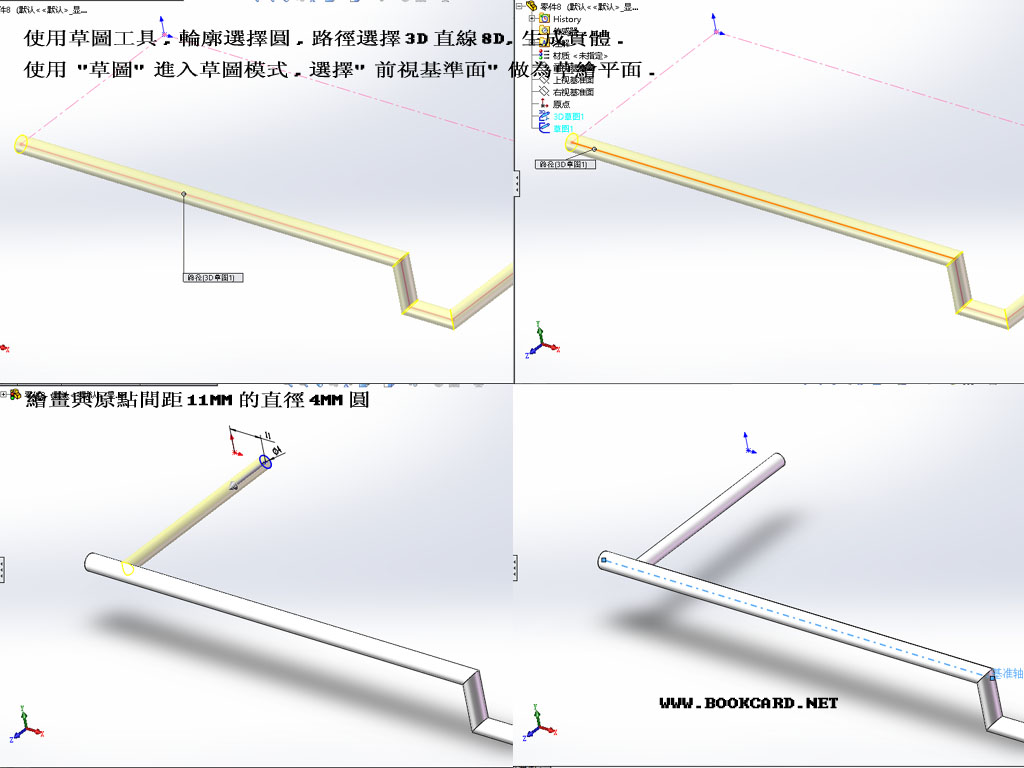
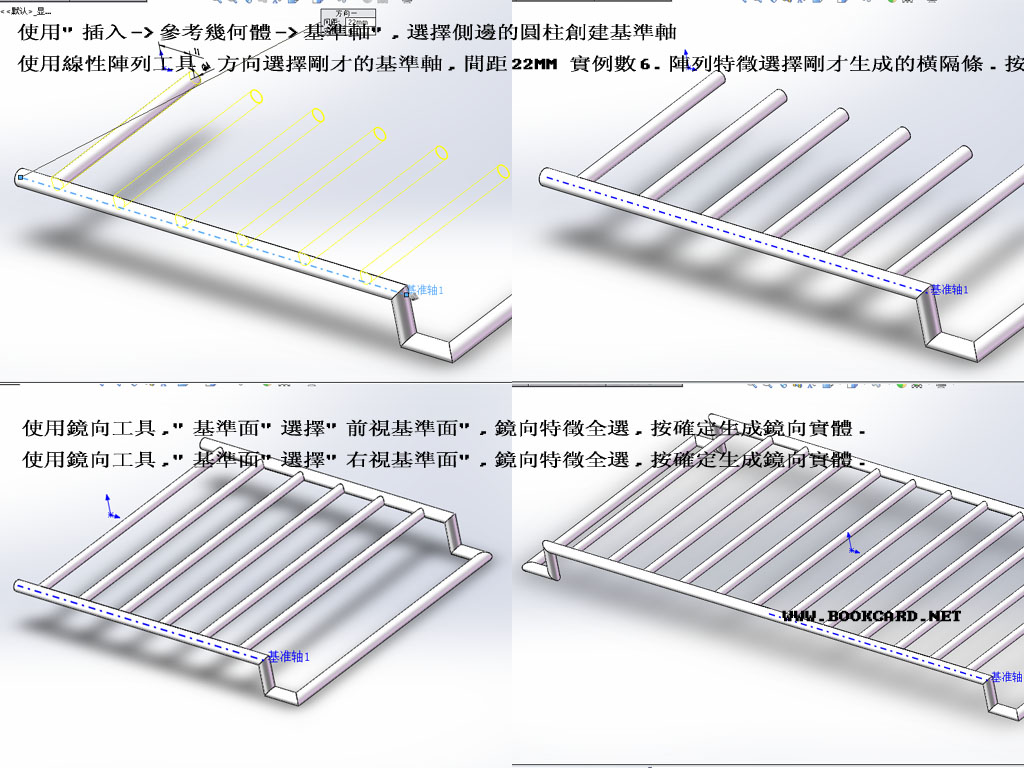
3D打印-製作爐架3D模型
SOLIDWORKS 製作爐架3D模型
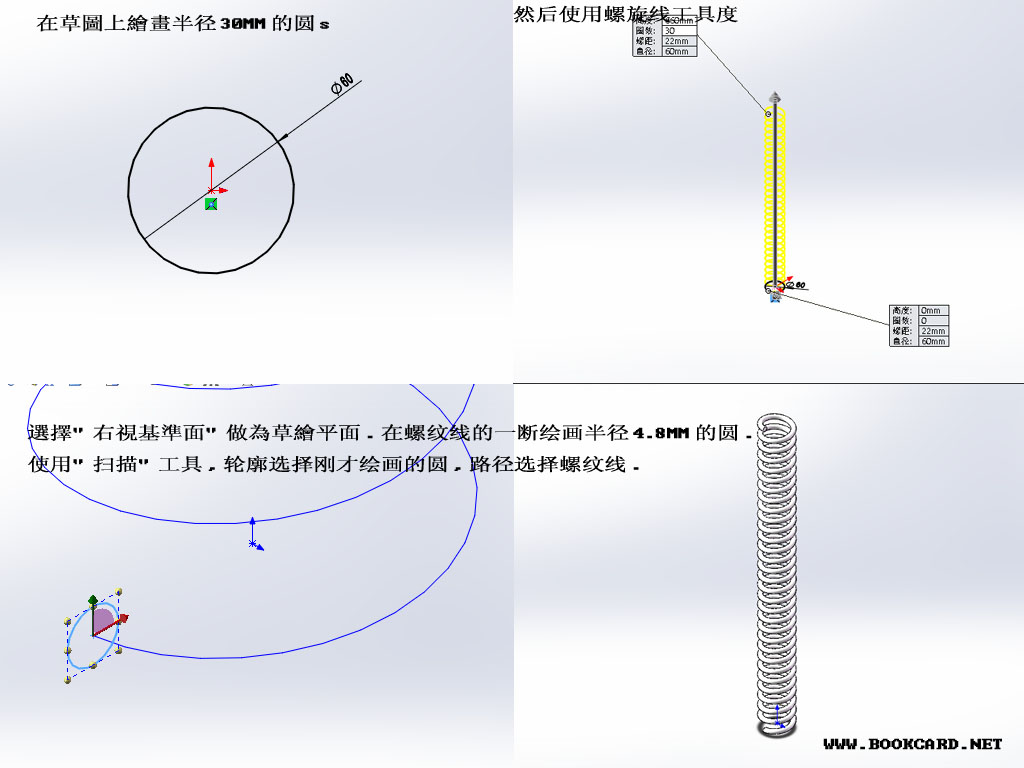
3D打印-製作弹簧3D模型
SolidWorks製作彈簧3D模型,主要就是使用”掃描”和”螺旋線”工具,不過要實制3D打印的話可能需要尼龍作為打印源料.
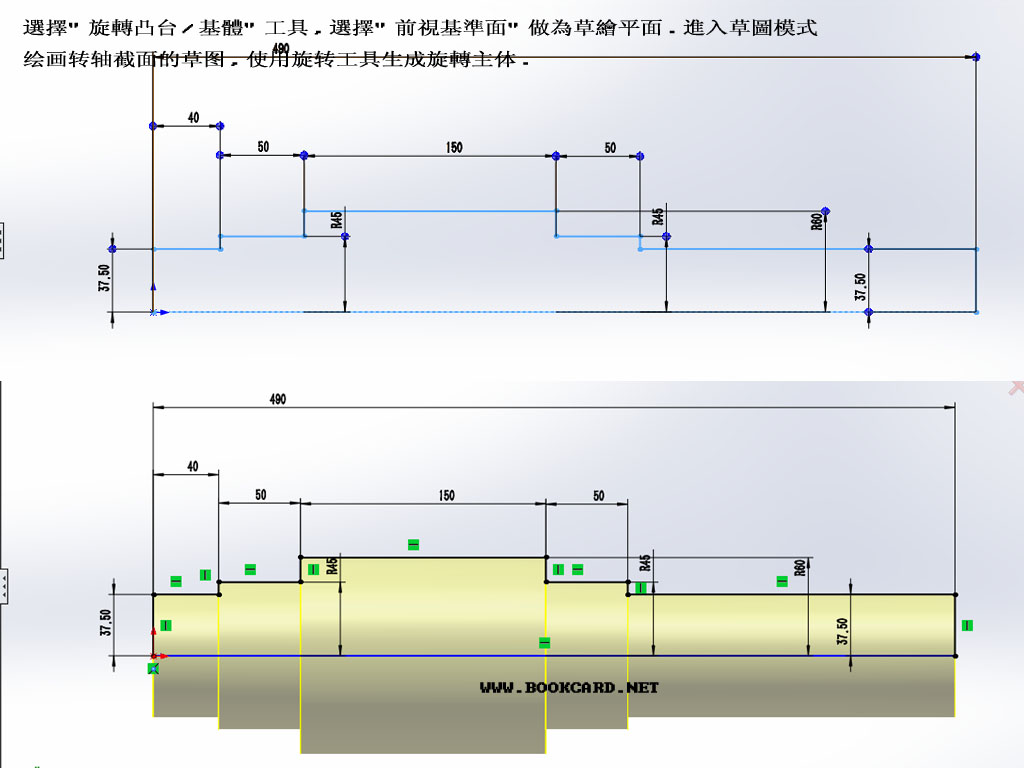
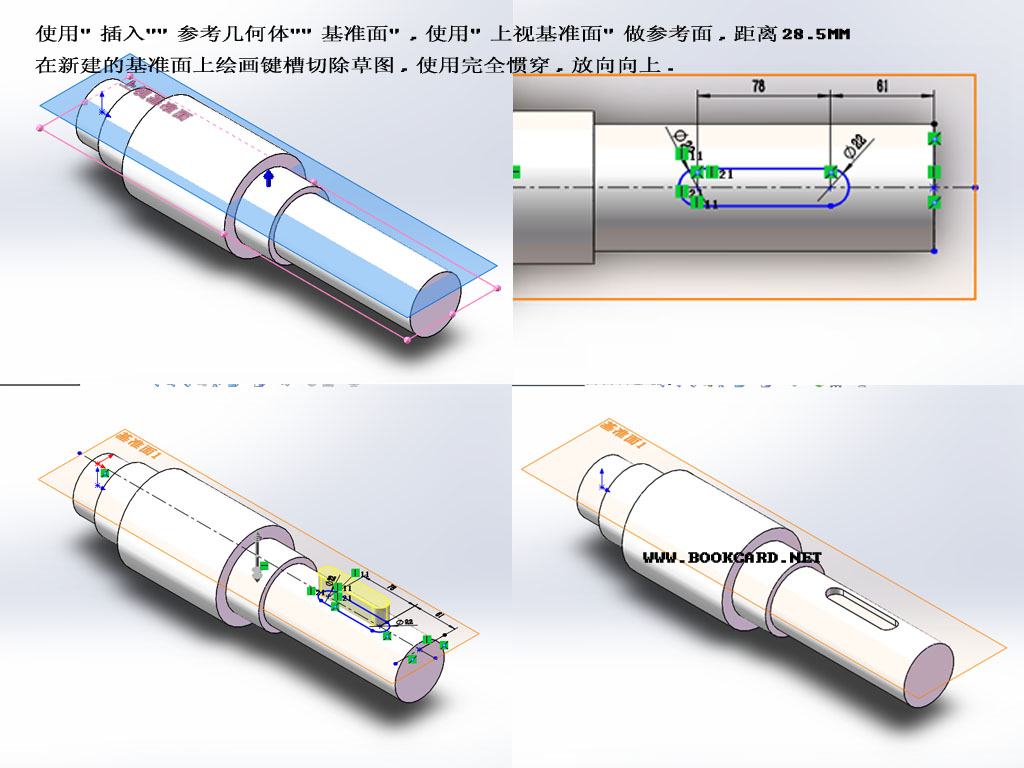
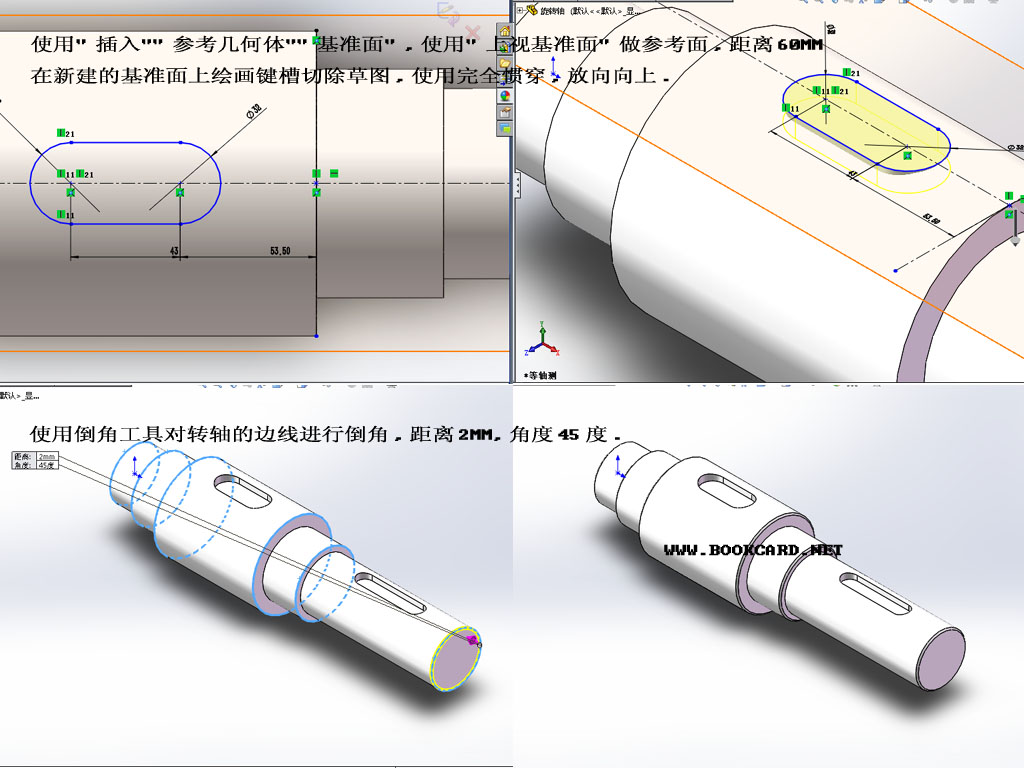
3D打印-製作转轴3D模型
SolidWorks製作转轴3D模型,转轴由圆柱,键槽,螺孔,销孔等等组成.
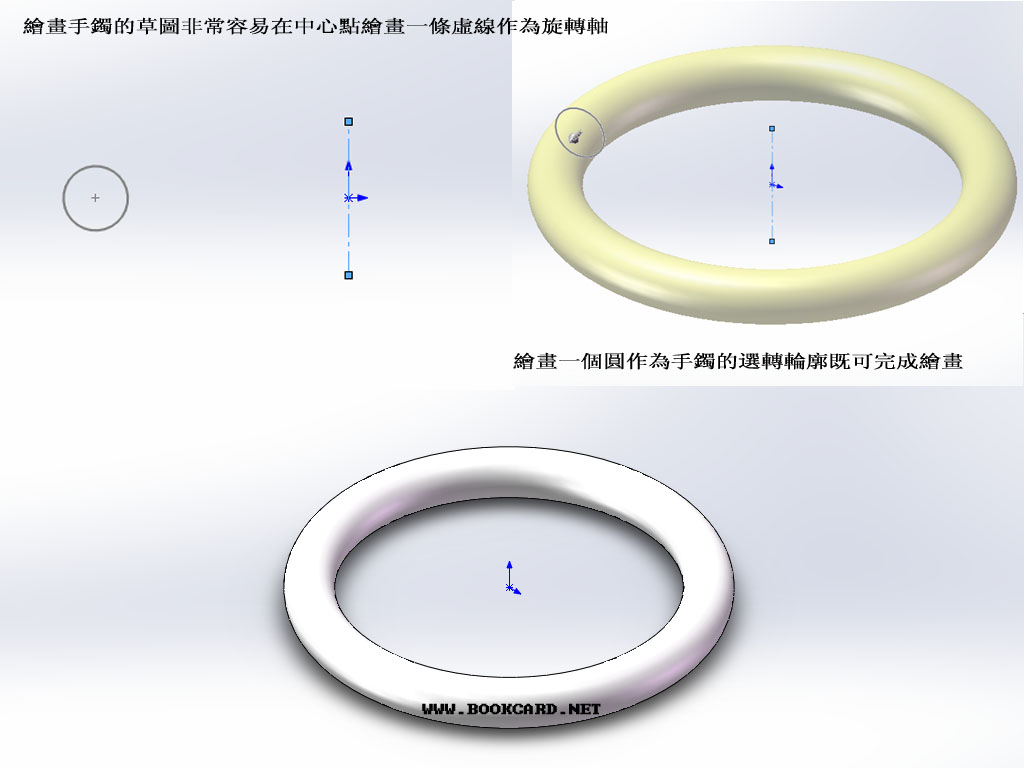
3D打印-製作手镯3D模型
SolidWorks製作手鐲3D模型
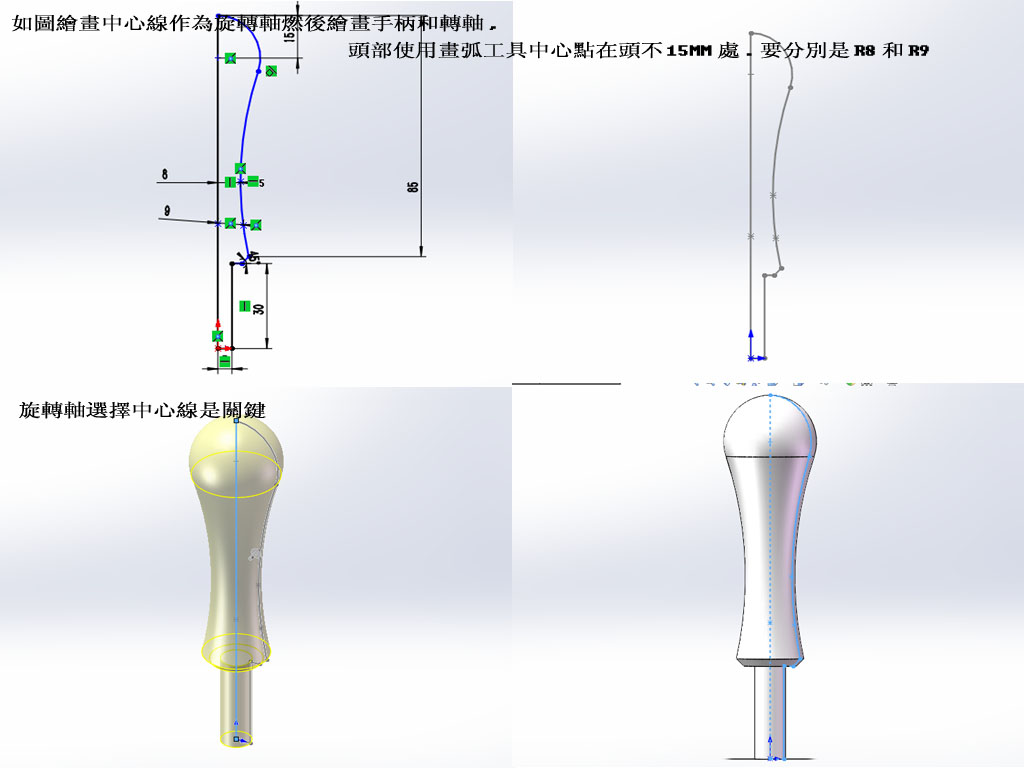
3D打印-製作波箱棍3D模型
SolidWorks製作波箱棍3D模型
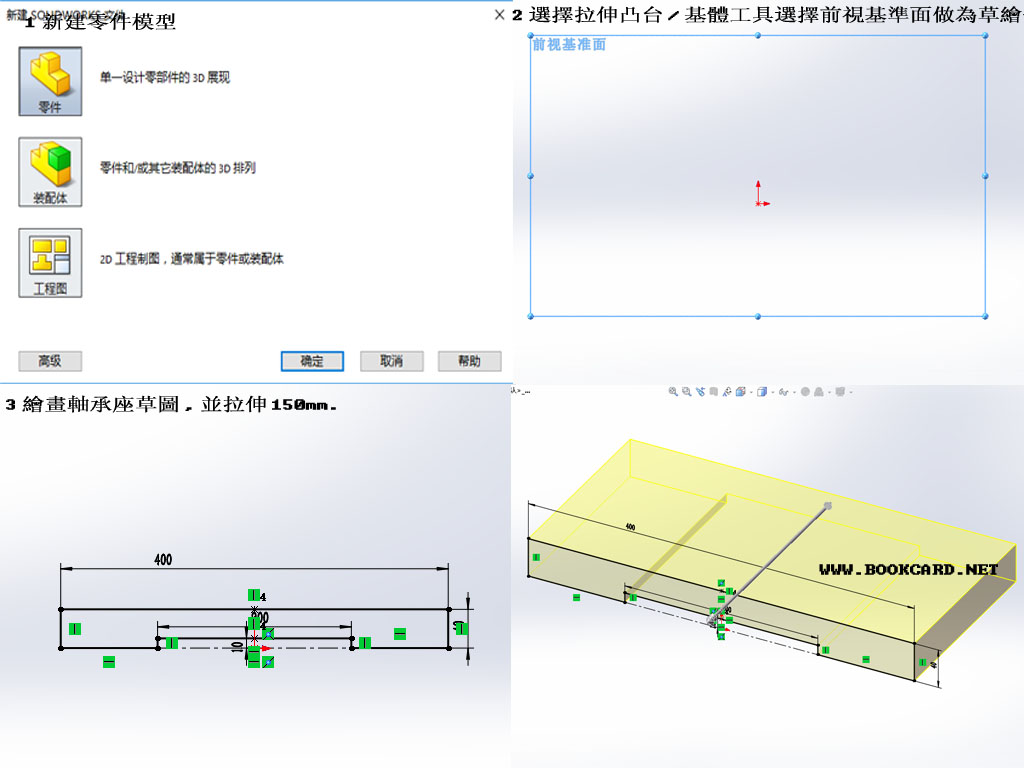
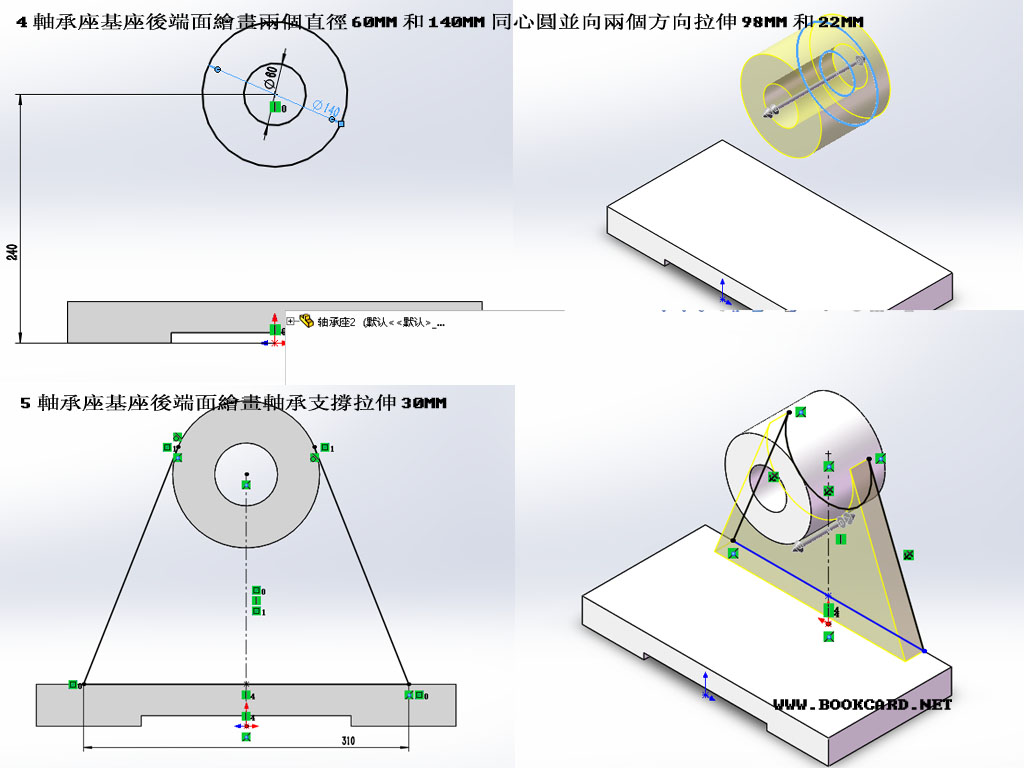
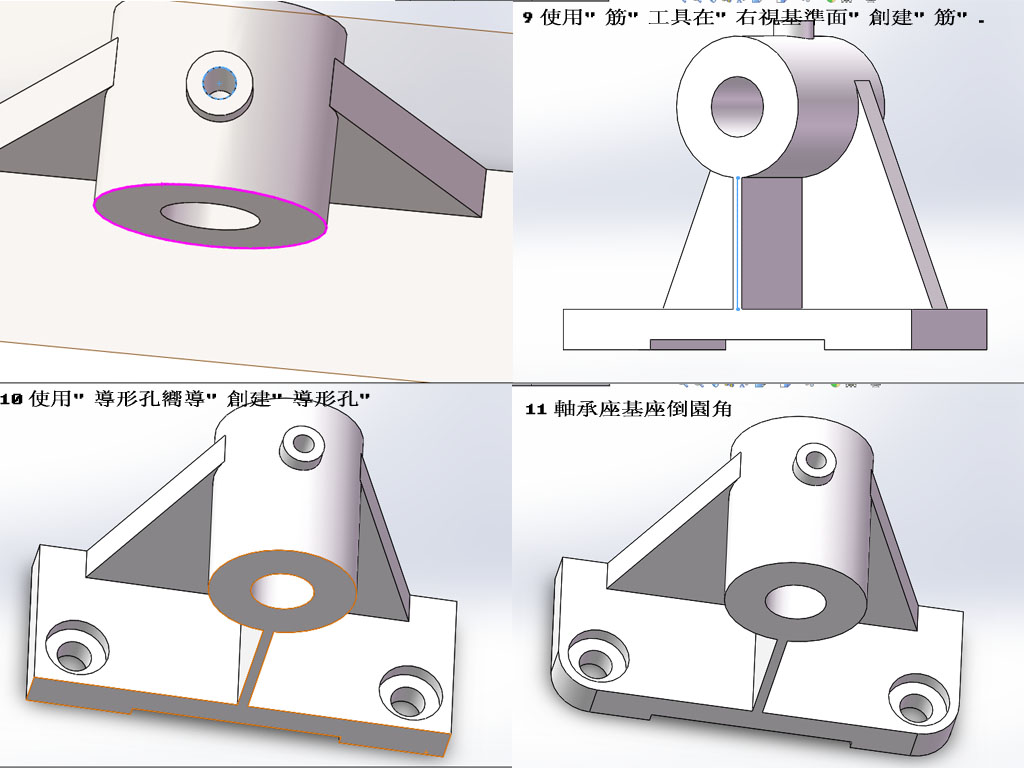
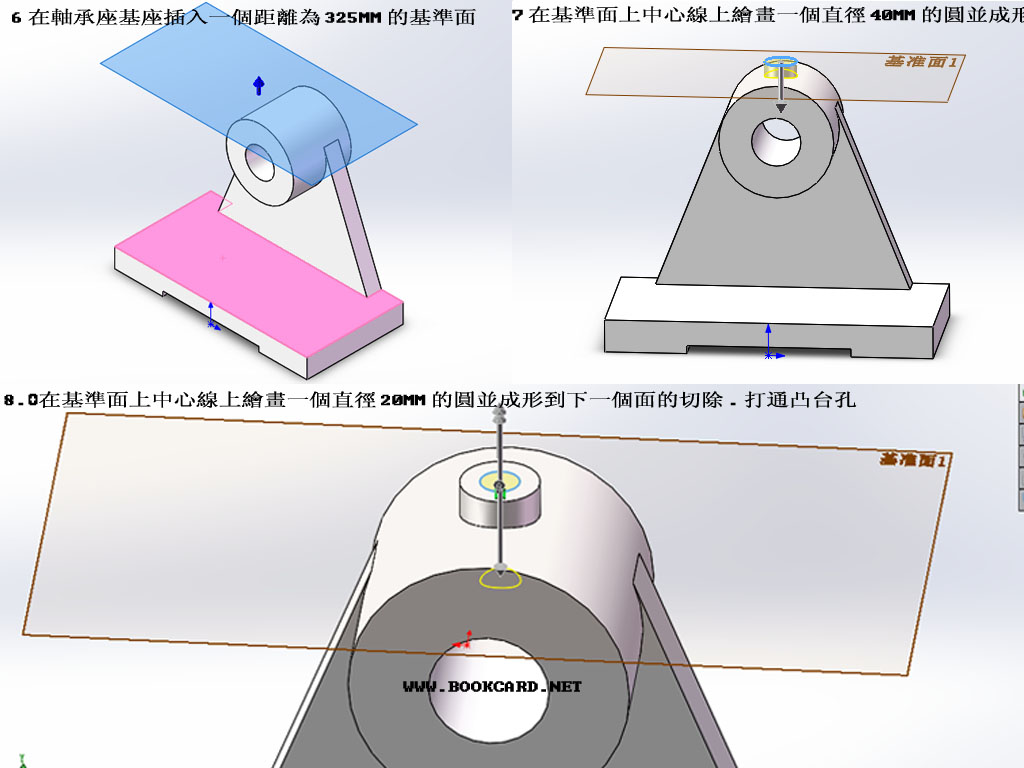
3D打印-製作軸承座3D模型
SolidWorks製作軸承座3D模型

3D打印-製作法蘭3D模型
SOLIDWORKS 製作法蘭3D模型, 法蘭是軸與軸或管與管理之間連接的零件.
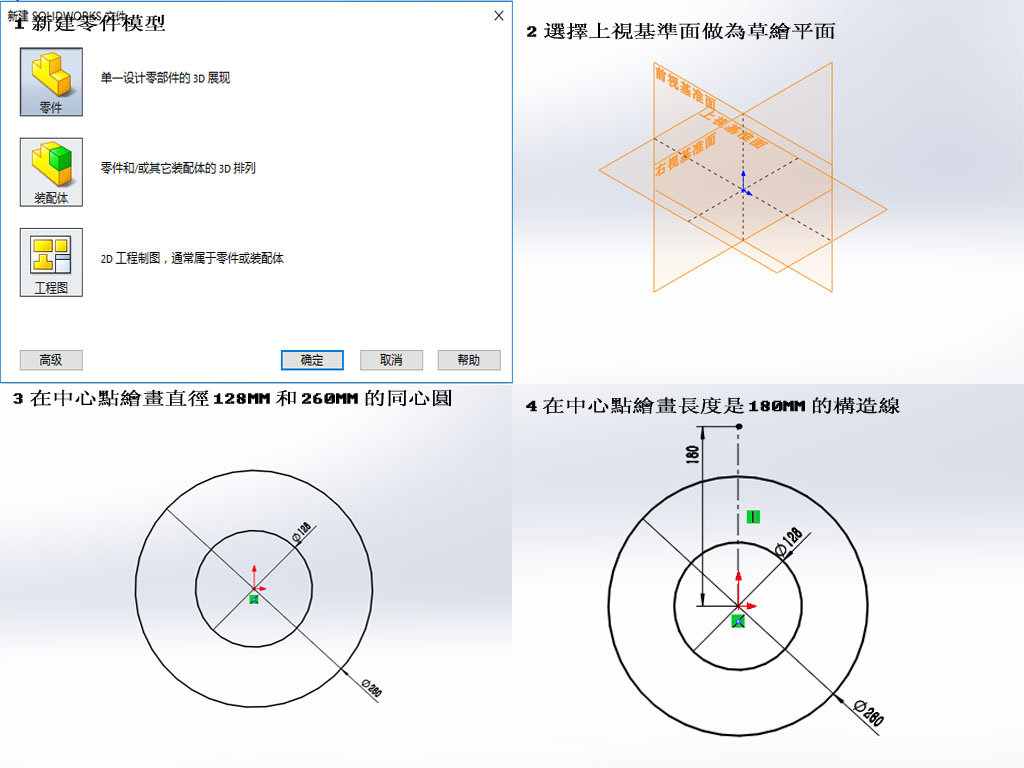
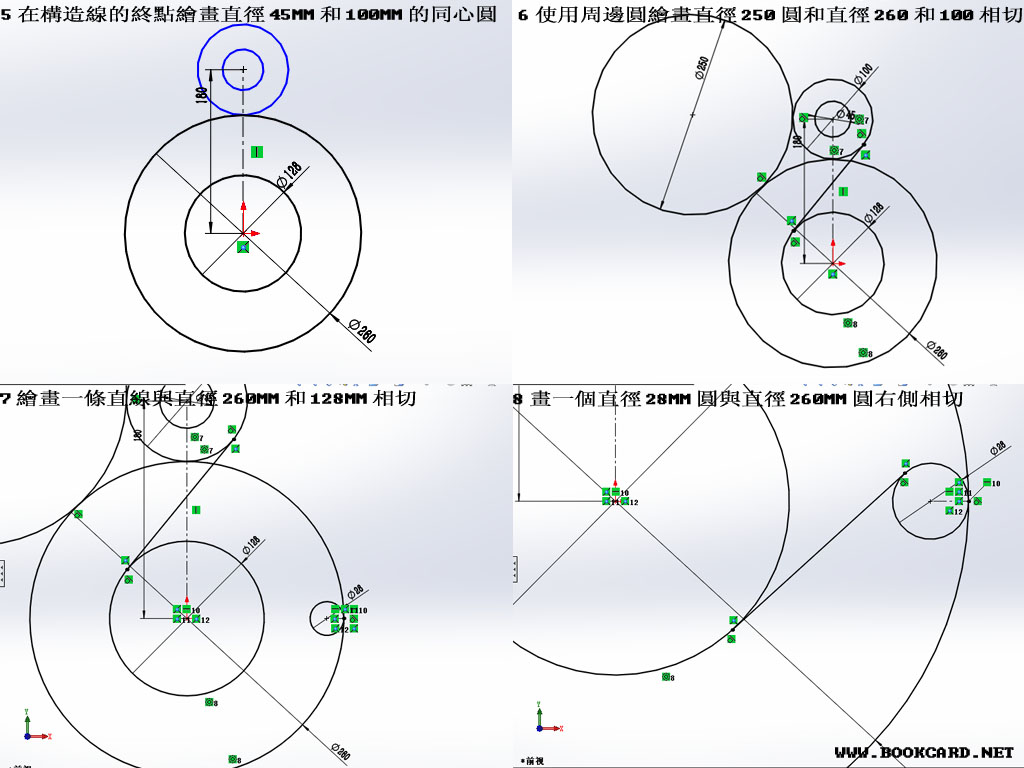
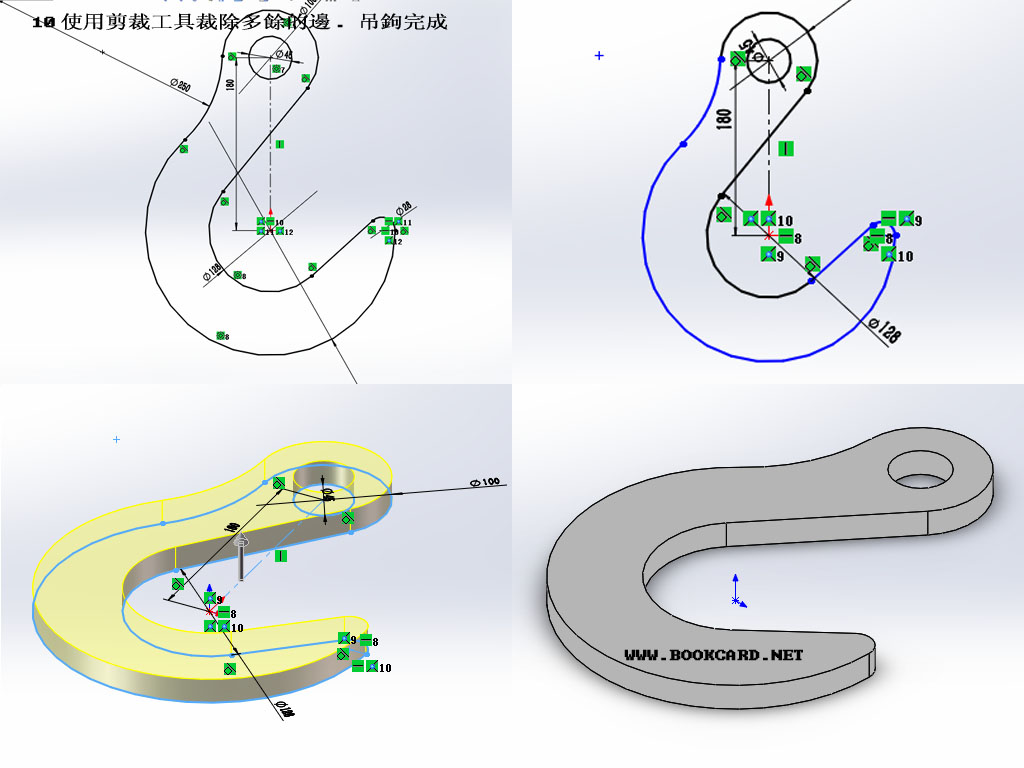
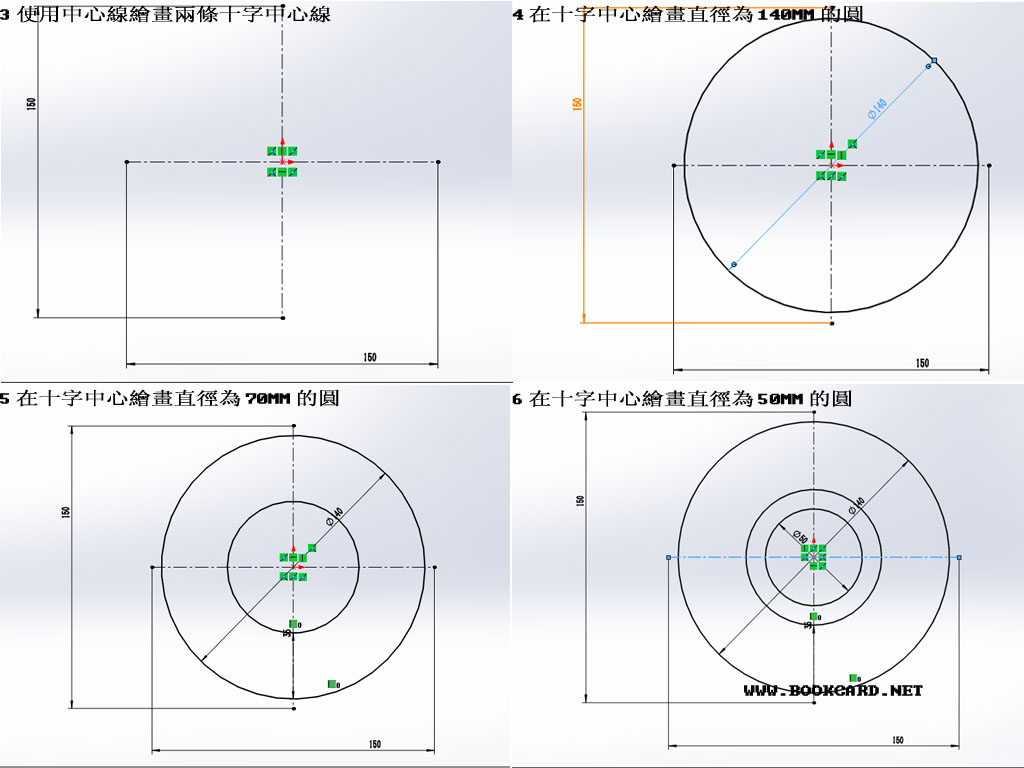
3D打印-制作吊钩3D模型
SOLIDWORKS 製作吊鉤3D模型
魚缸養鯊魚
不用猜疑魚缸中的就是鯊魚,一共3條不停的旋轉,可能看見人肚餓了.餵食時如果手放在魚缸上面, 鯊魚會不會跳出魚缸一口咬你的手.
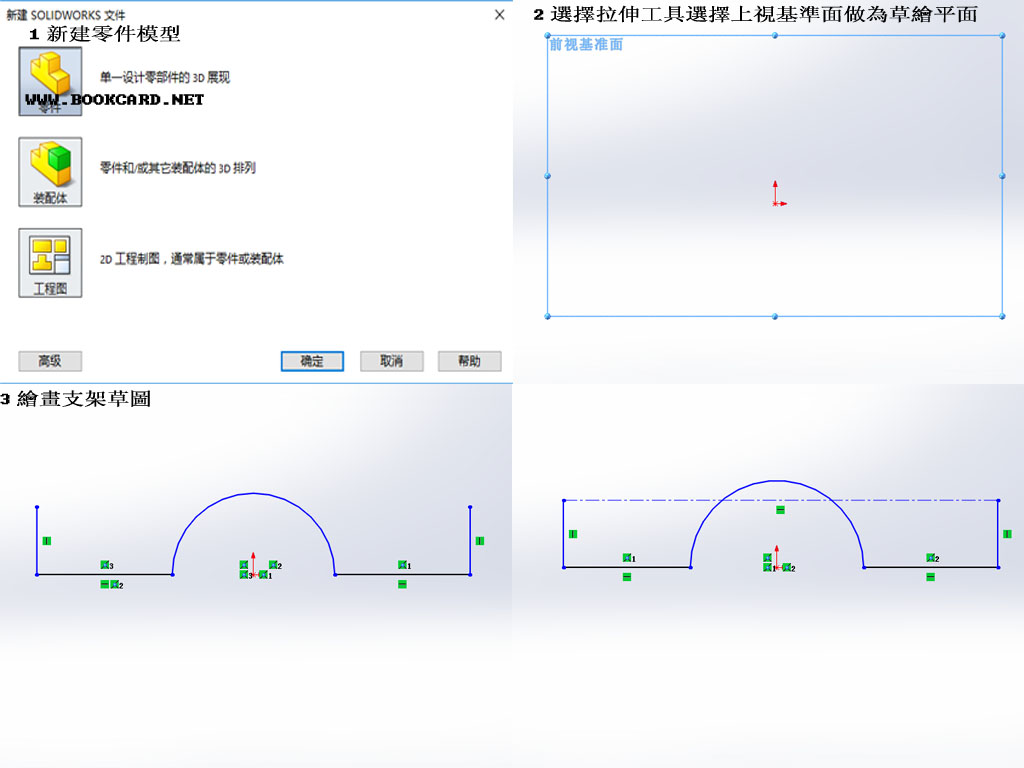
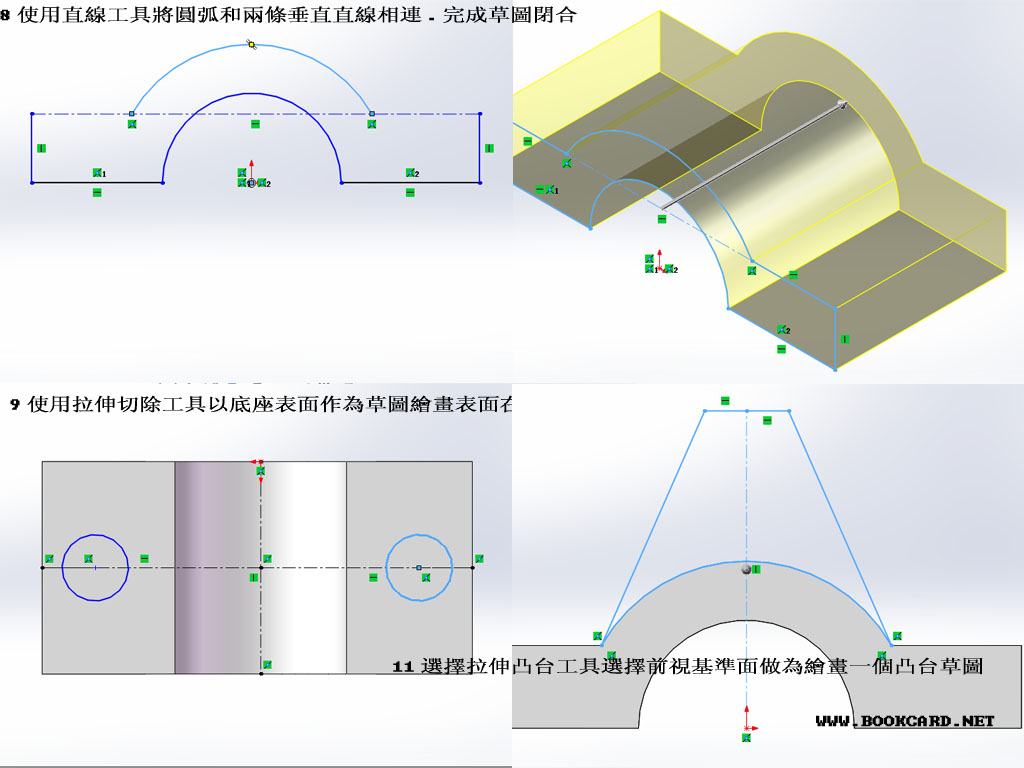
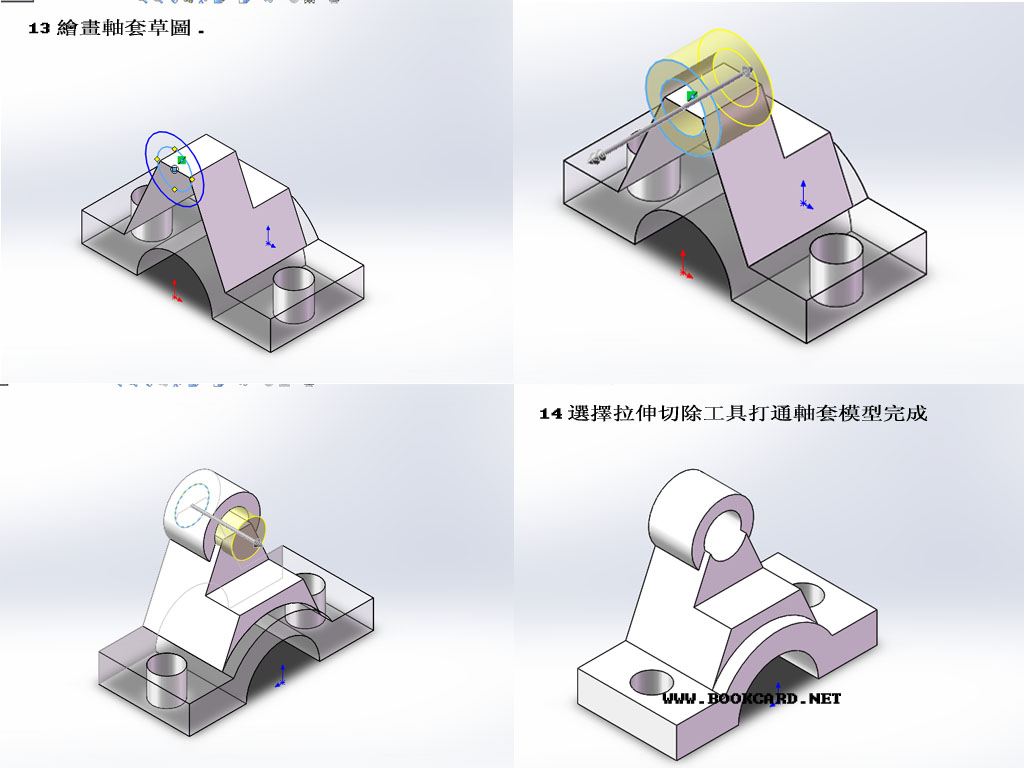
3D打印-製作支架座3D模型
SolidWorks製作支架座3D模型
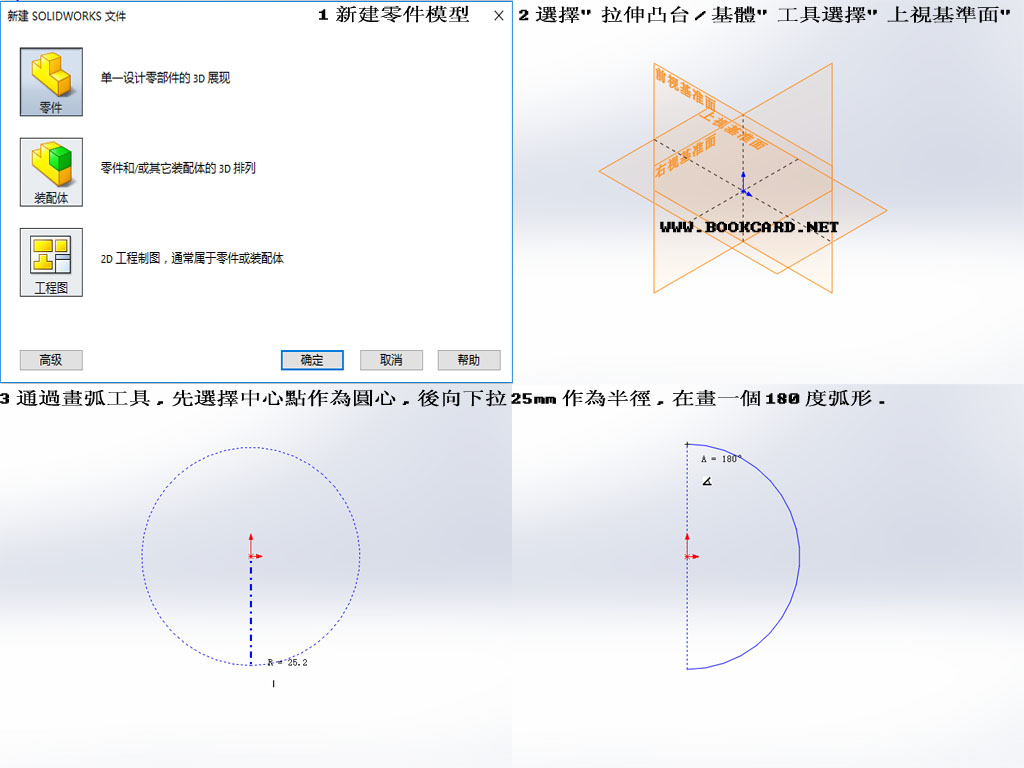
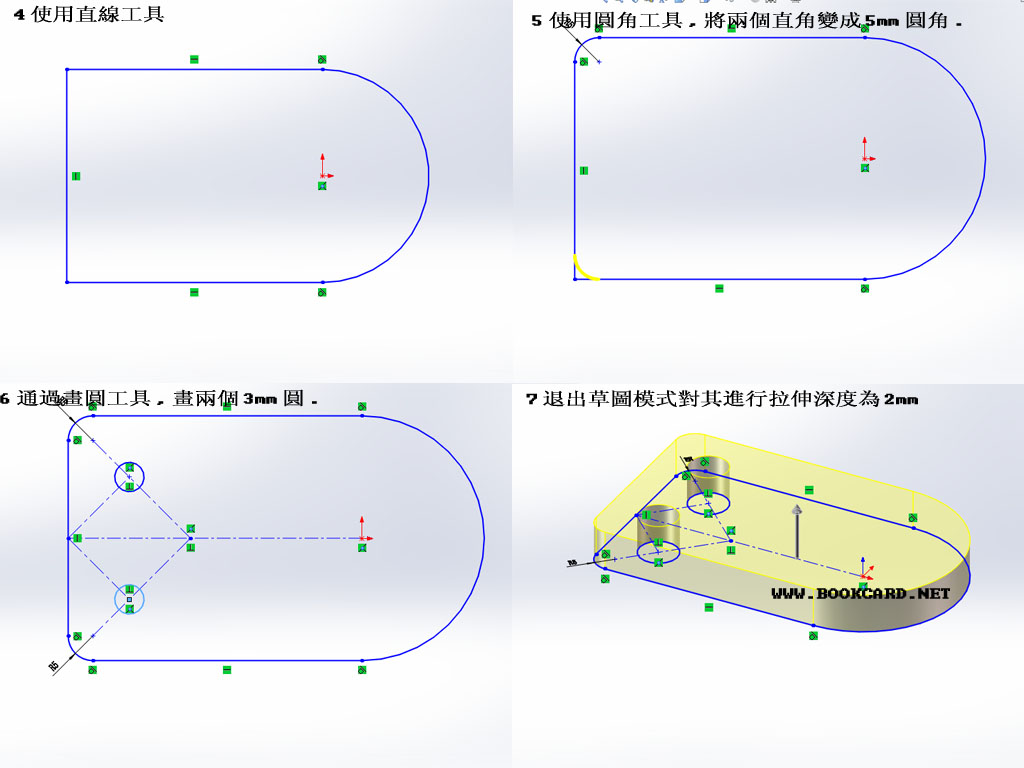
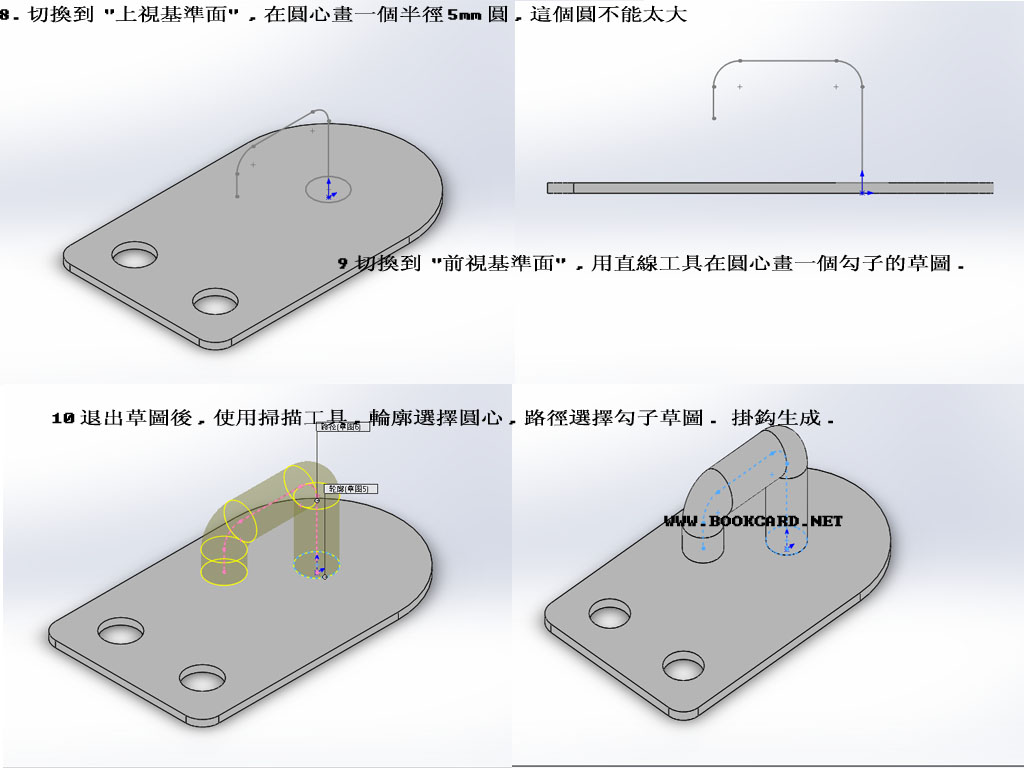
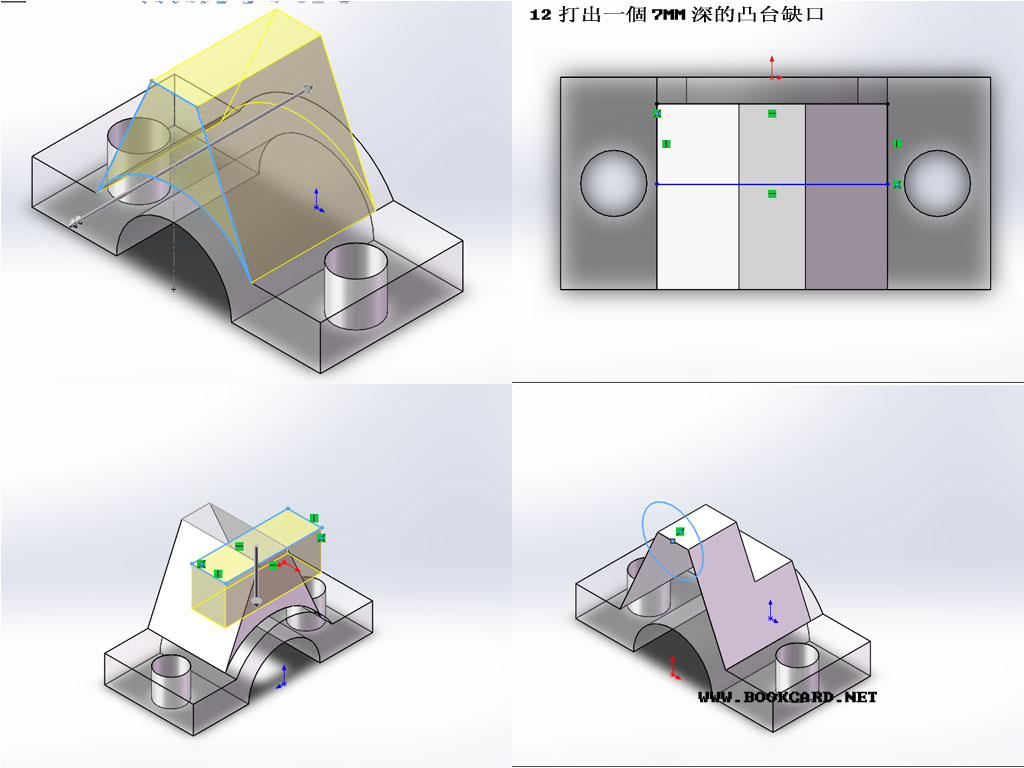
3D打印-製作掛鈎3D模型
SOLIDWORKS 製作掛鈎3D模型
WordPress升級錯誤-手工還原
WordPress升級很方便,但是升降後出錯也是經常的事.剛剛升級4.7版後就不能進入後臺,所以只能手工恢復舊版本.
首先要找一個穩定的版本或者之前安裝的版本,解壓縮後把Wordpress下所有的檔上傳覆蓋原來的檔, wp-content保存有主題和插件無需上傳, 根目錄的 wp-config.php保存有資料庫檔不要覆蓋.
打開https://www.bookcard.net/wp-admin/ 提示你需要更新數據庫,更新後就可恢復到舊版本.
3D打印-123D Design 无法启动
Win10系统在安装了个更新后123D Design 无法启动,重装123D Design也无法解却,安装DirectXP Run Time也没用,只能在WinXP下使用32位版本,但有些尺寸数字无显示.
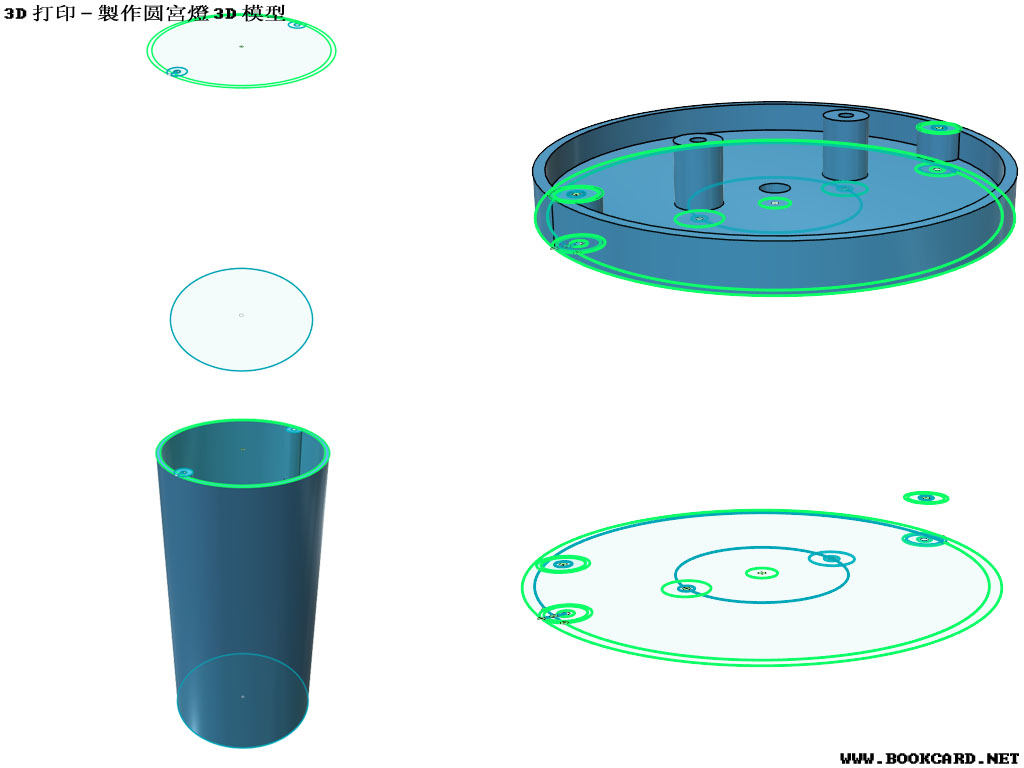
3D打印-製作圓宮燈3D模型
製作圓宮燈的3D模型,先畫一個圓柱再把它挖空,在入面放置LED燈.然後在做一個蓋.只是未知如何把它掉起來.
第一次打印模型設計出錯了,螺母位沒有下沉,蓋子裝不上.如果懸空的畫出度要深夠深.
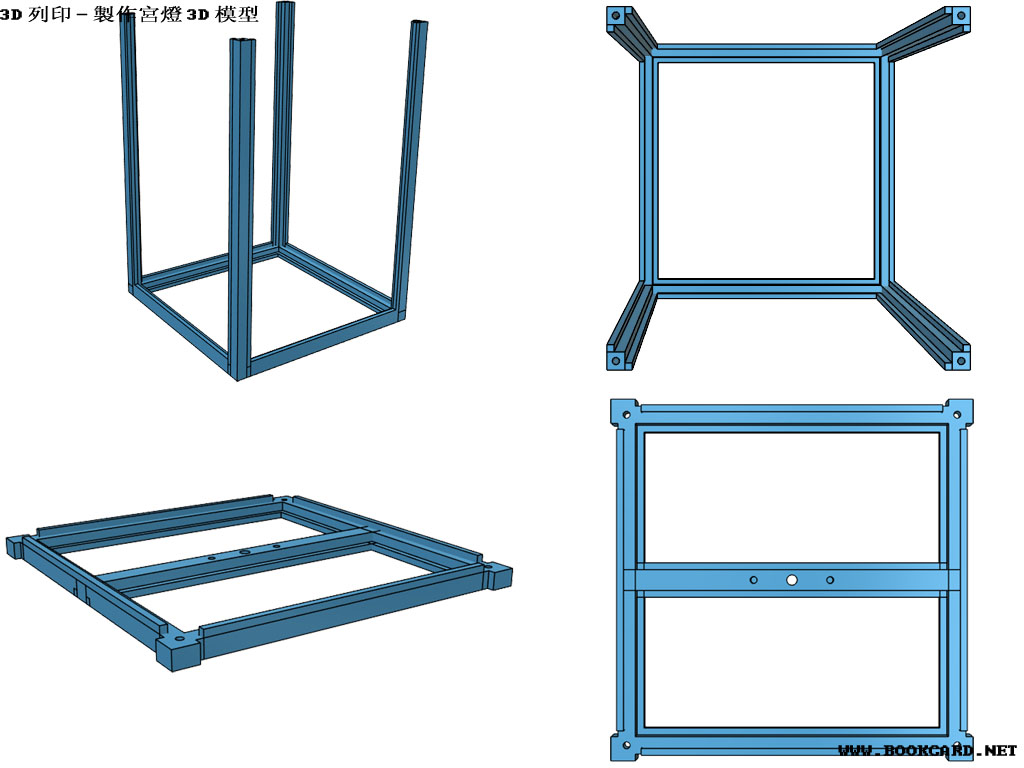
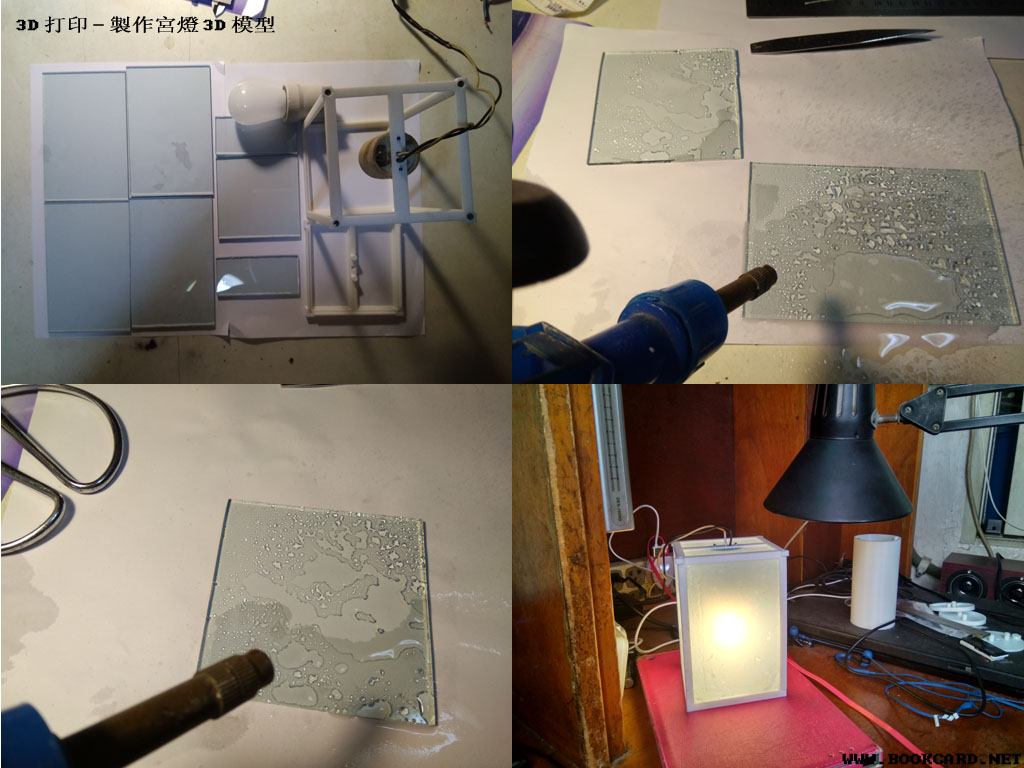
3D打印-製作宮燈3D模型
製作宮燈的3D模型很簡單,就是一個空架子,外加透面玻璃板.中間放置LED燈.然後把他掉起來.3D模型先用草圖畫好底座再拉伸就可以了.Cura中的的專家設置一定要選上填充頂層和填充底層,上蓋使用螺絲結合.
玻璃的尺寸要比要縮小1mm作為誤差,玻璃洗幹靜後,需要噴上大量的水後貼上磨沙膜.將底膜撕開後貼上,磨沙膜的可以小1mm.
最後的宮燈效果是不錯的.
遲點製作一個龍門掉架.

俄羅斯太空船空升空後爆炸
美國的太空補給船在9月1日爆炸後, 俄羅斯太空補給船也於12月1日也爆炸,現在只能靠日本的太空補給船在12月9日飛向空間站.國際空間站食水和燃料只能靠之前的儲備,
3D打印-製作名片盒3D模型
Autodesk 123D Design製作名片盒3D模型
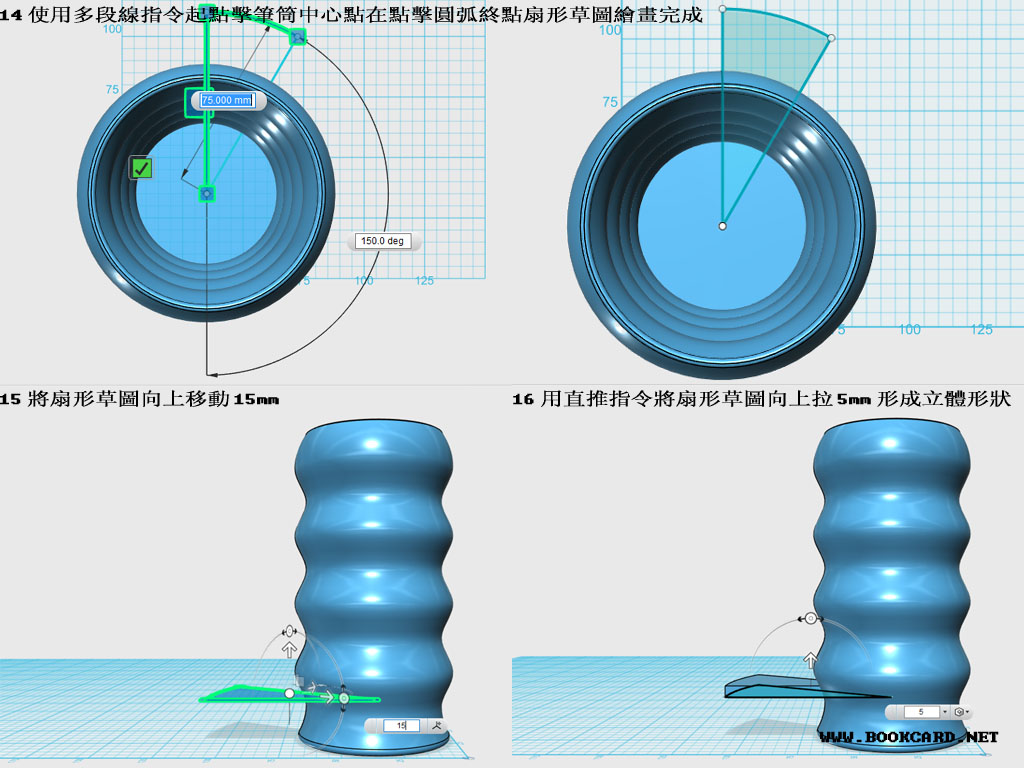
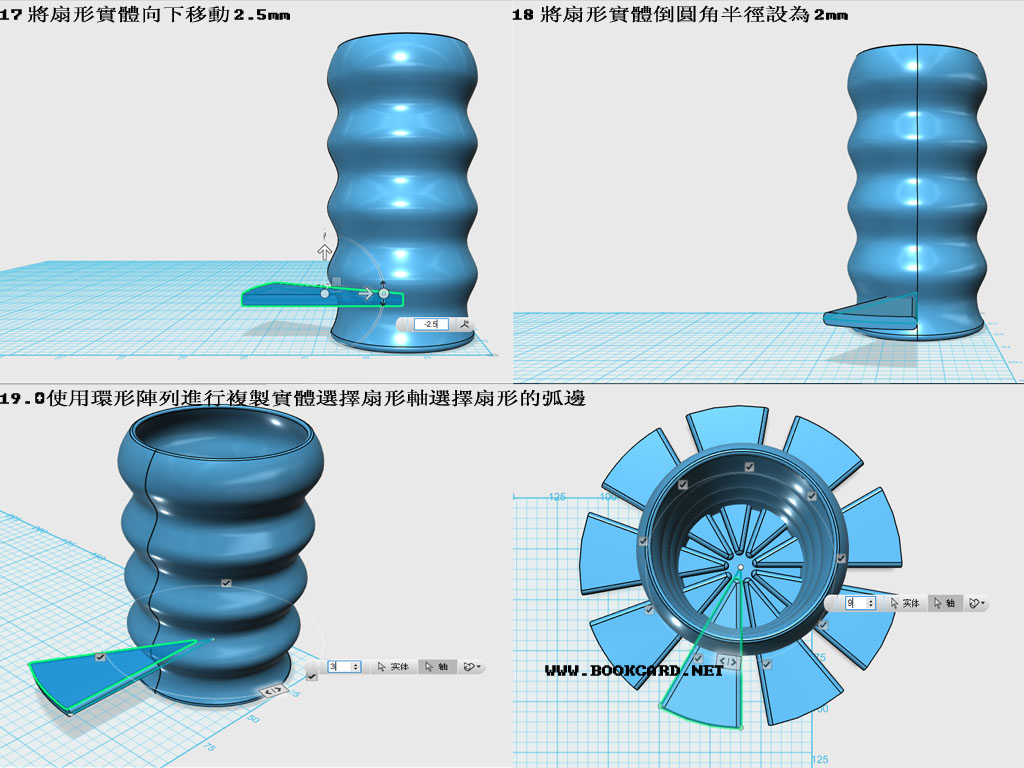
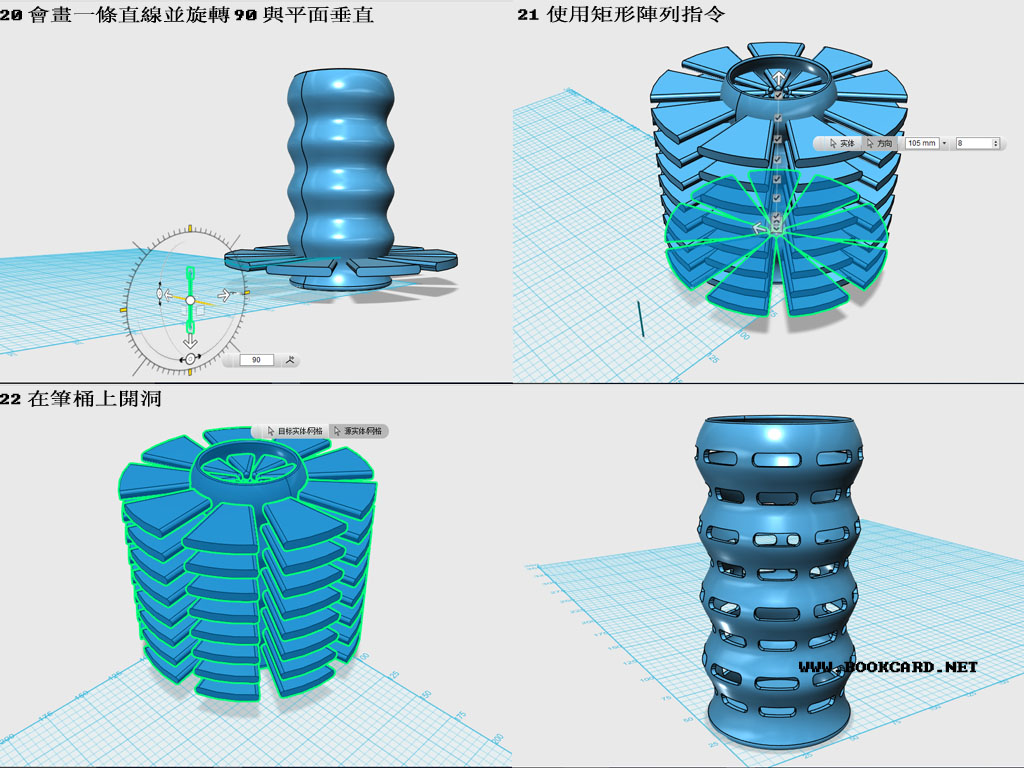
3D打印-製作筆筒3D模型
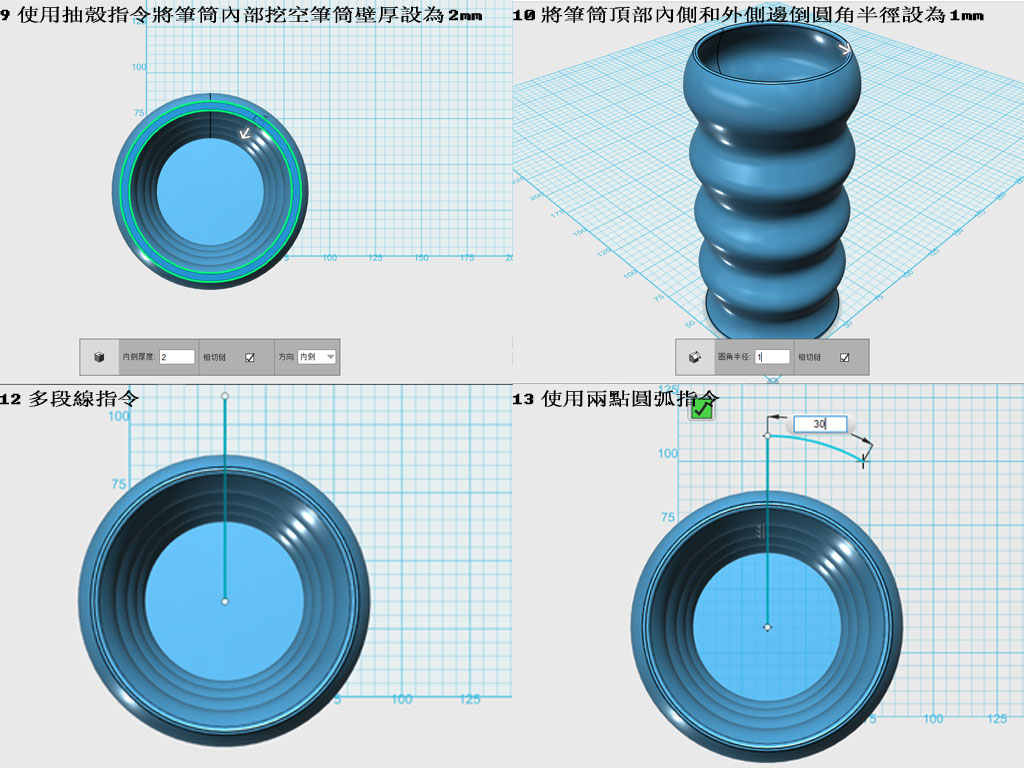
Autodesk 123D Design製作筆筒3D模型
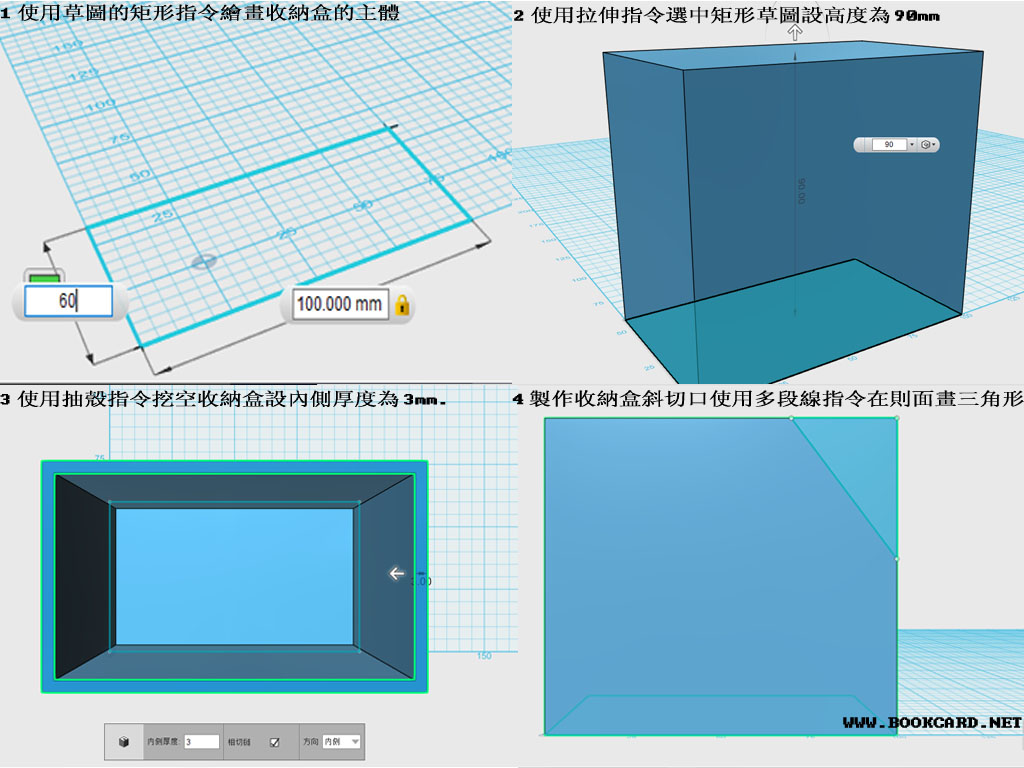
3D打印-製作收納盒3D模型
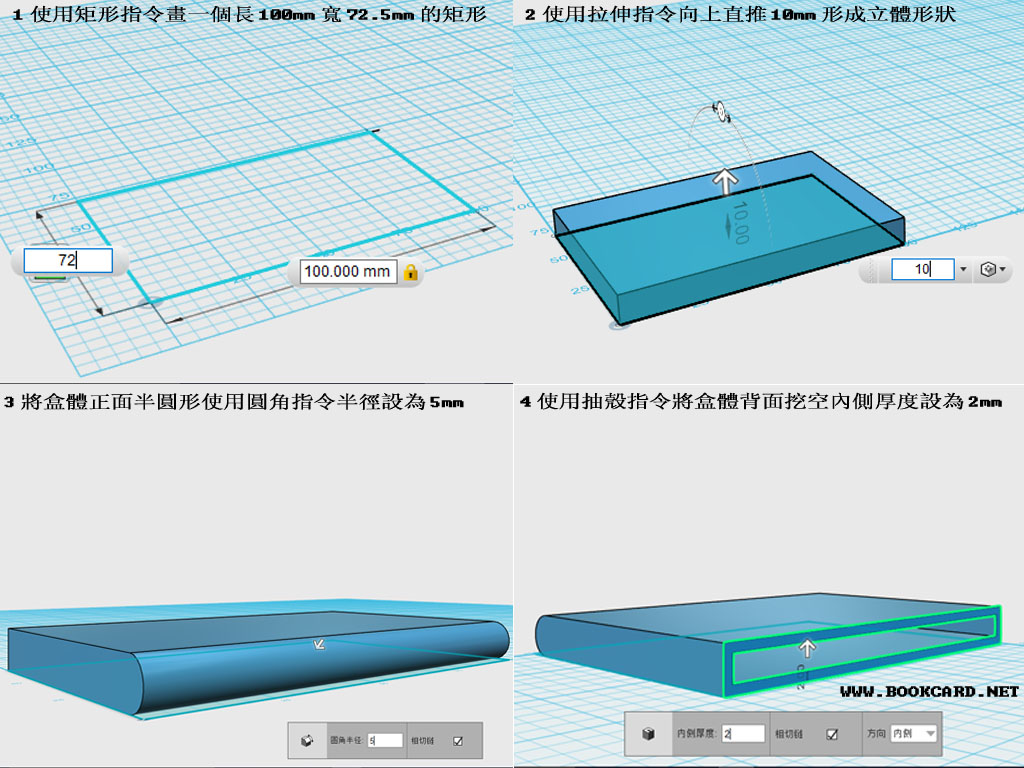
Autodesk 123D Design製作收納盒3D模型
1. 使用草圖的矩形指令繪畫收納盒的主體,縱深為100mm,寬度為60mm.
2. 使用拉伸指令選中矩形草圖,設高度為90mm.
3. 挖空收納盒的主體,底部和側面的厚度都設為3mm.使用抽殼指令挖空收納盒,點擊主體的頂部,設內側厚度為3mm.
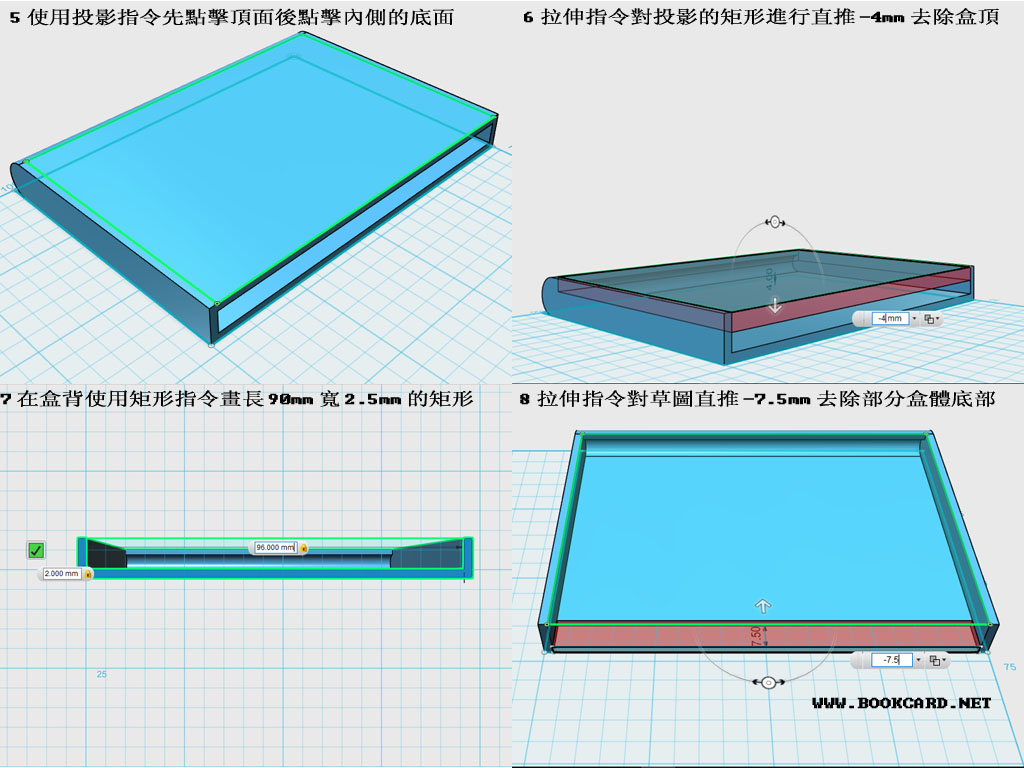
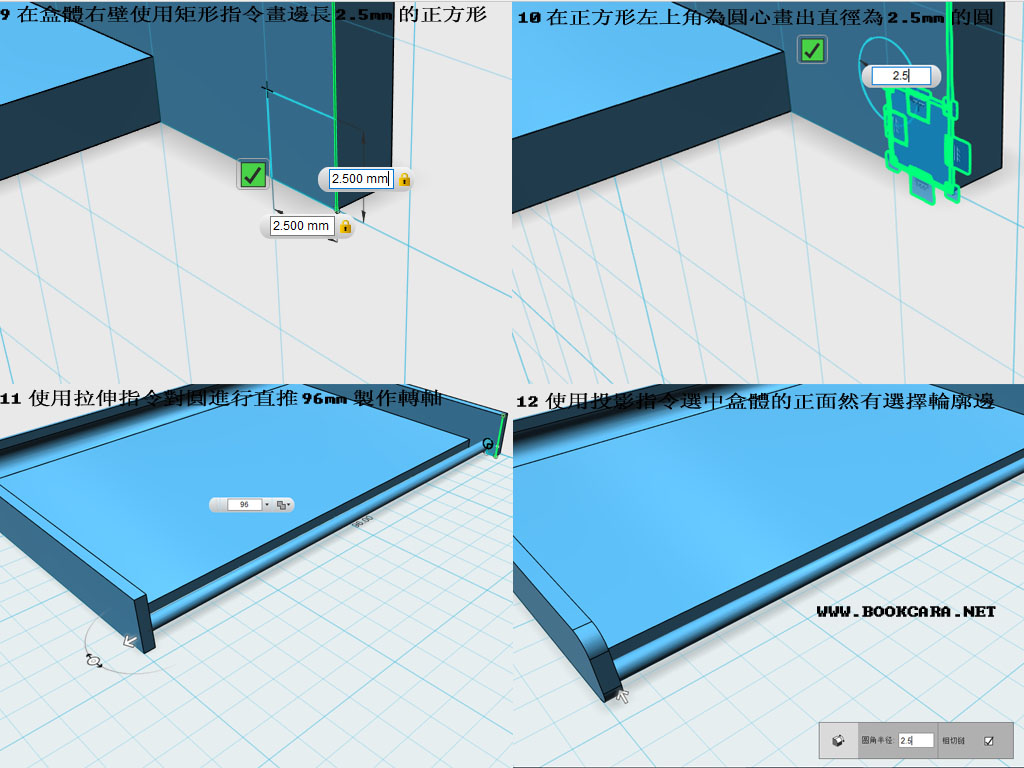
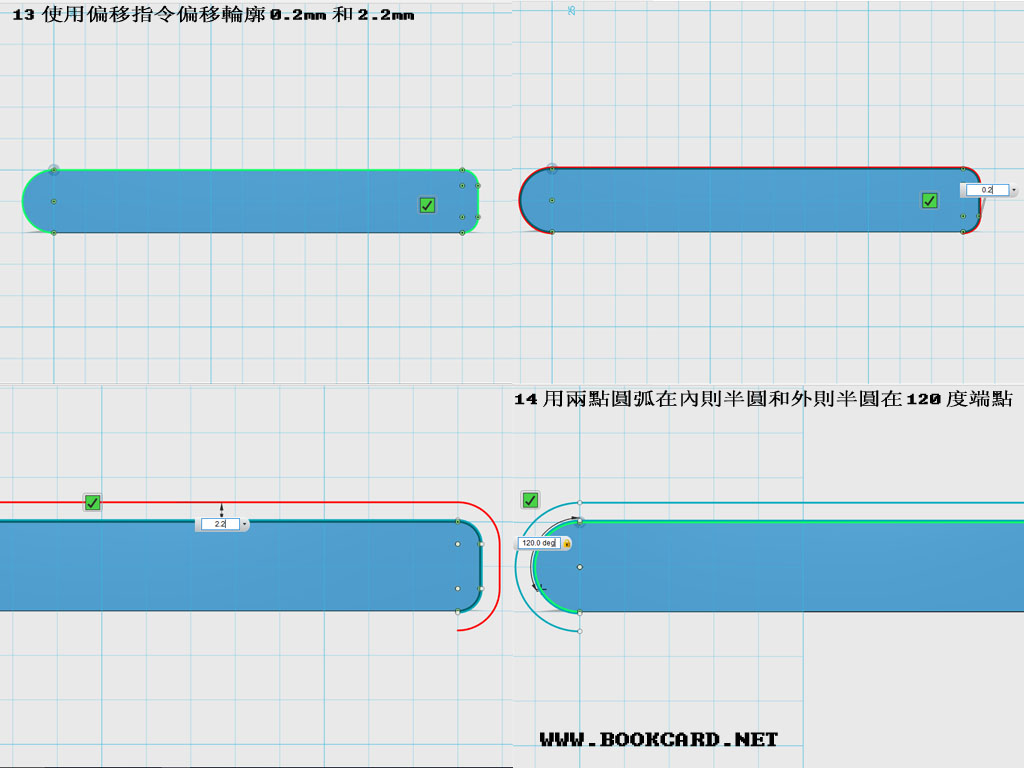
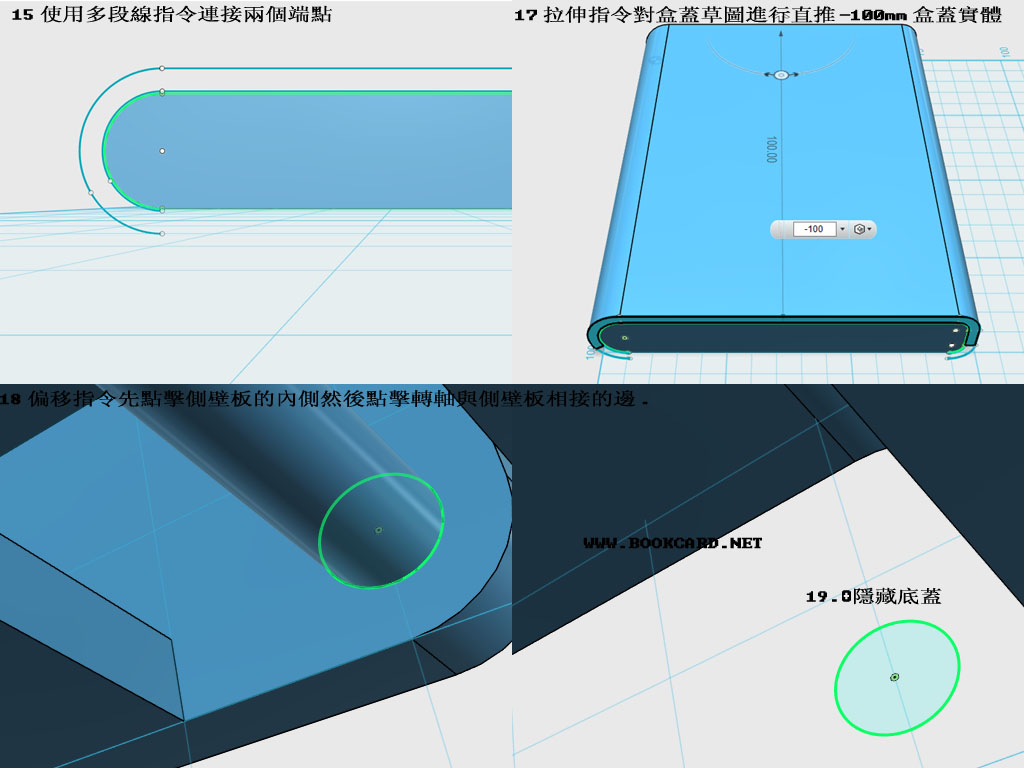
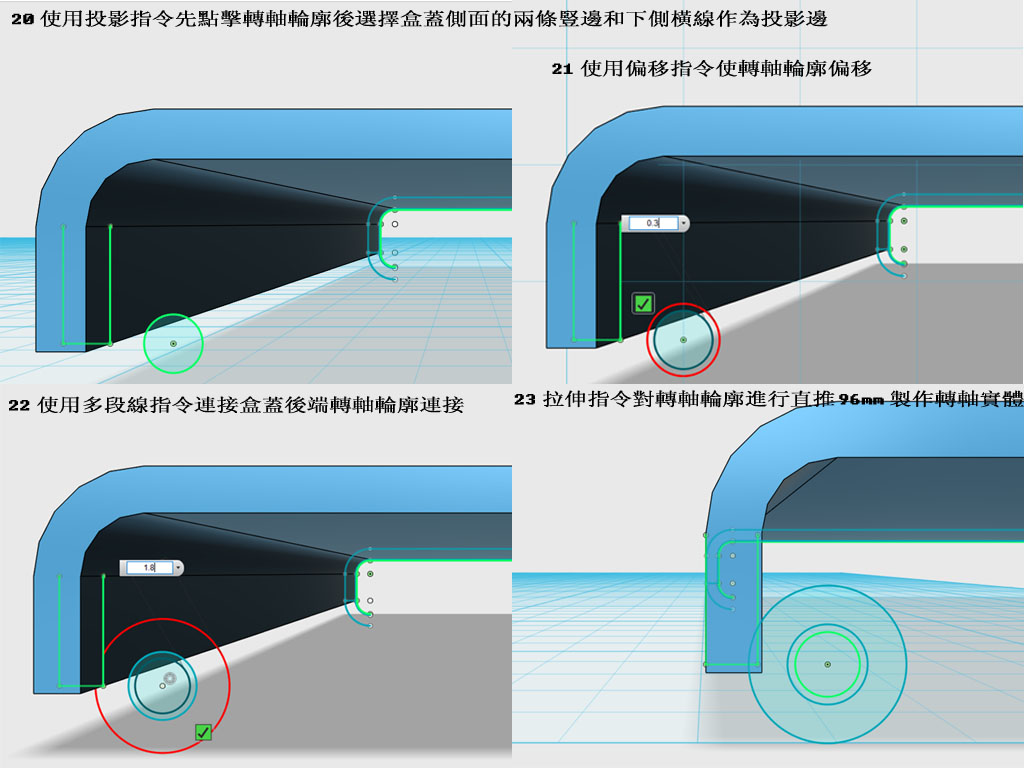
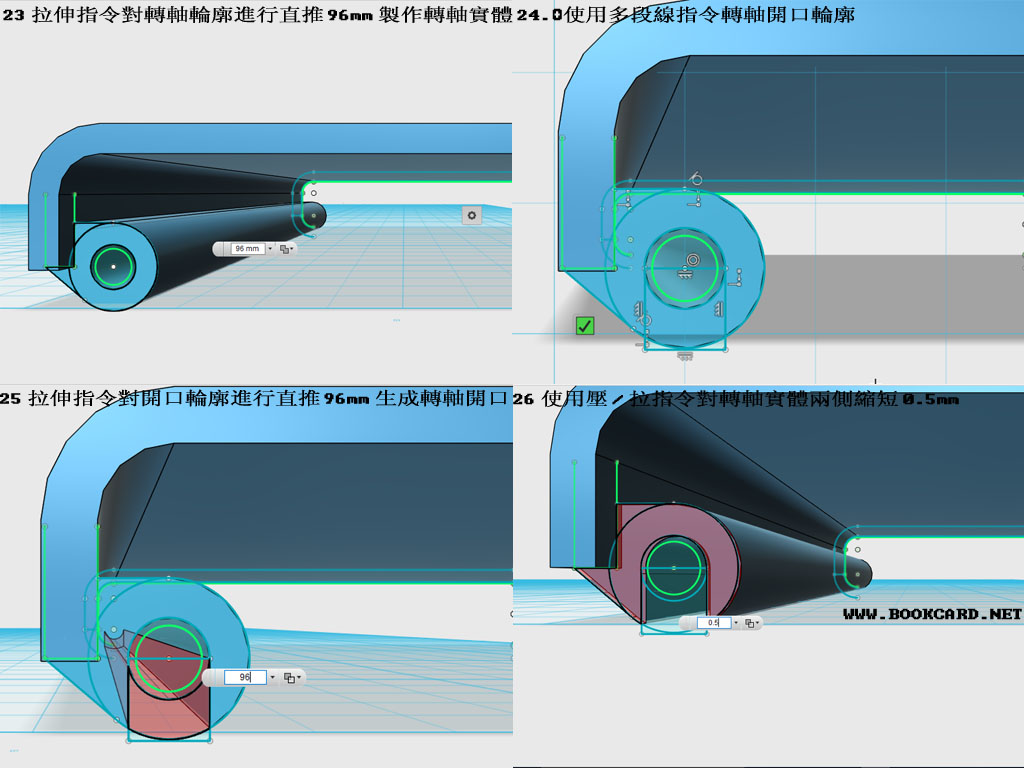
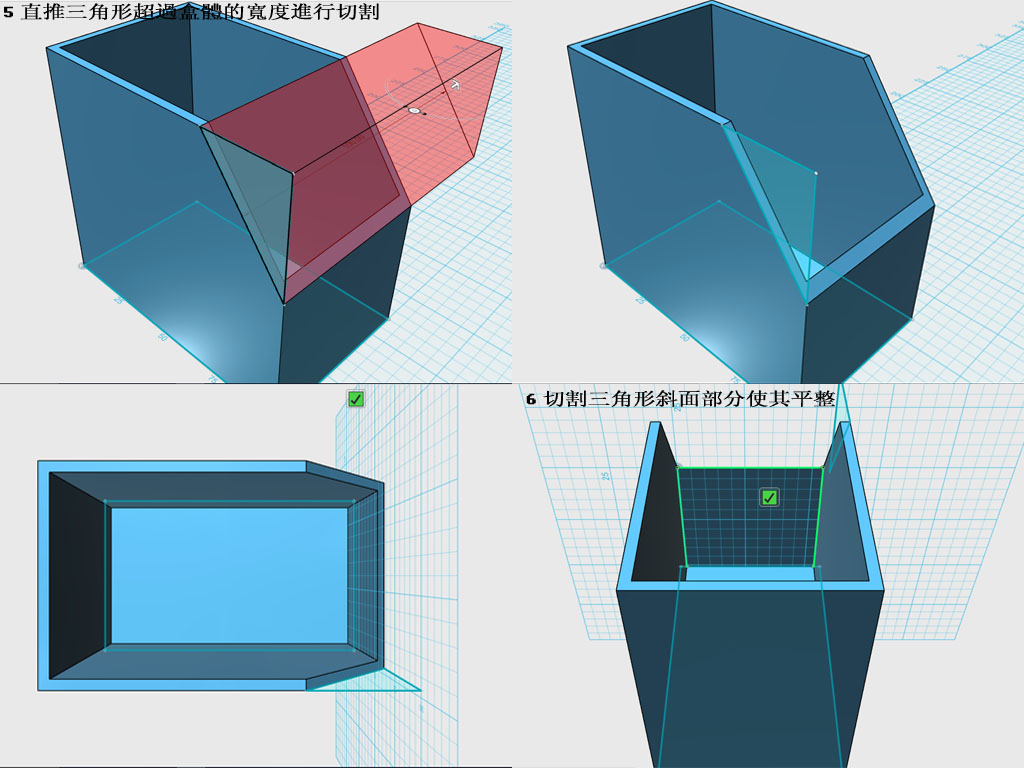
4. 製作收納盒斜切口,使用多段線指令在則面畫出寬30mm,高40mm的三角形草圖, 三角形要閉合.
5. 使用拉伸指令選中三角形草圖,直推三角形超過盒體的寬度.系統自動轉為切削模式進行切割.
6. 切割三角形斜面部分使其平整,使用投影指令生成草圖,先點擊前壁內側將其設為投影面,在點擊前壁內側頂部的邊,內側左右兩條邊,前壁外側頂部邊.
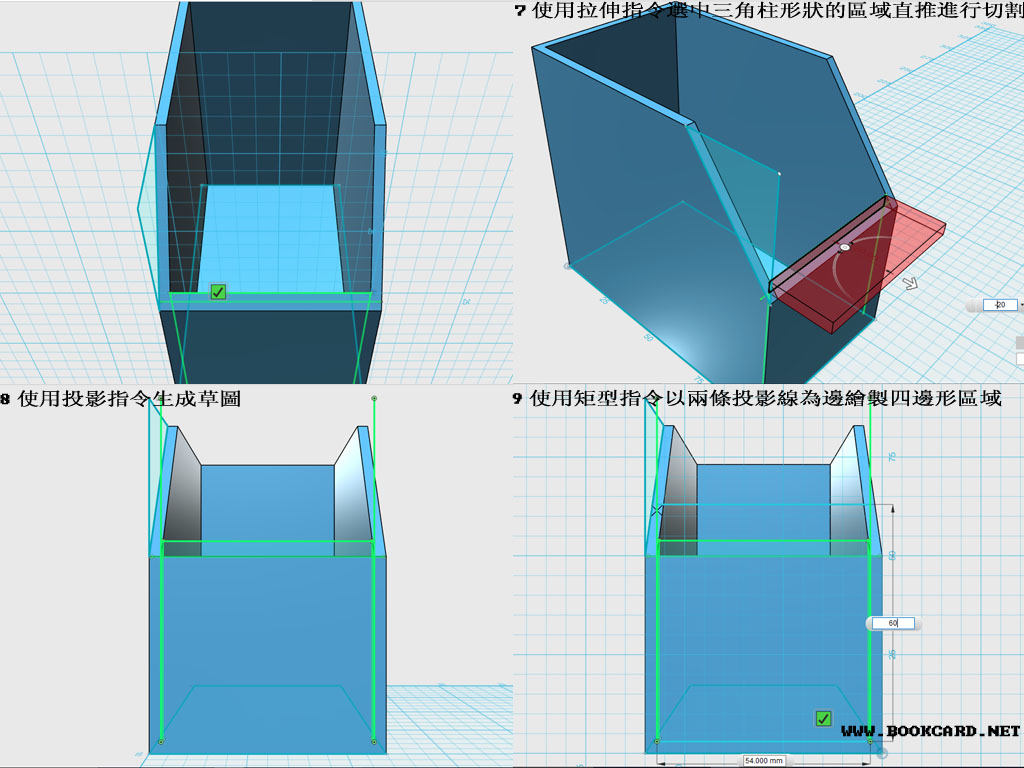
7. 使用拉伸指令選中三角柱形狀的區域直推,系統自動轉為切削模式進行切割.
8. 製作隔板使用投影指令生成草圖,將前隔板的外側面選為投影面,將後壁板內側面的兩條豎邊投影在這個面上.
9. 使用草圖的矩型指令以兩條綠色投影線為邊繪製一個高度90mm,寬度45mm的四邊形區域.
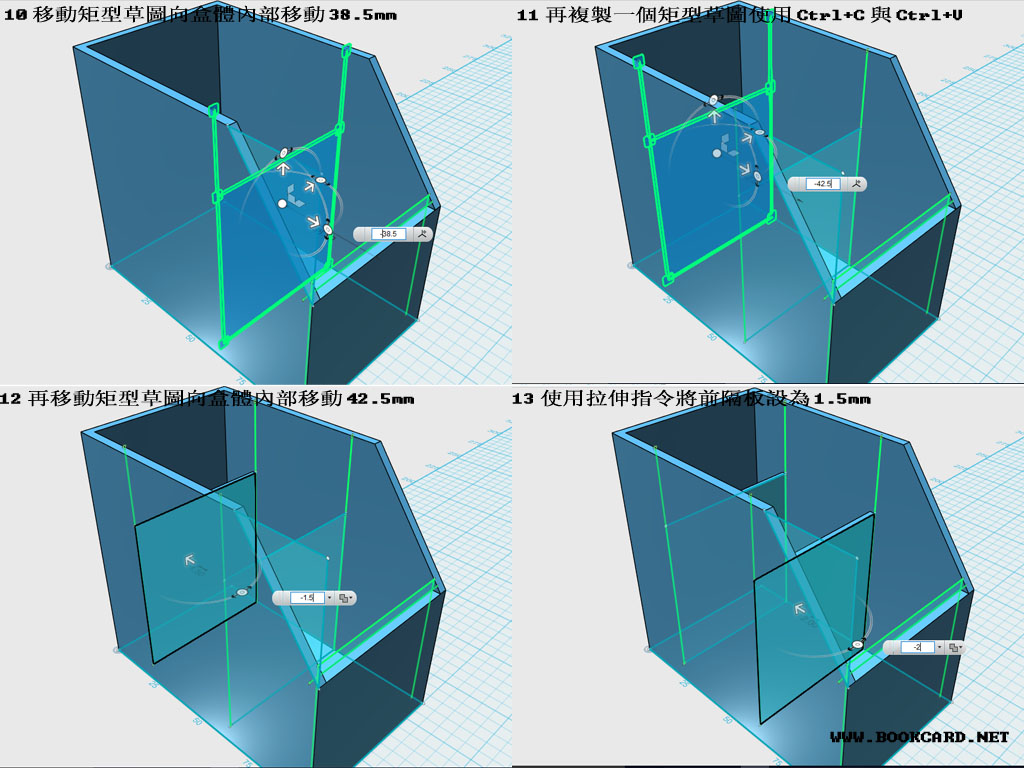
10. 移動矩型草圖向盒體內部移動38.5mm
11. 再複製一個矩型草圖,使用Ctrl+C與Ctrl+V.
12. 再移動矩型草圖向盒體內部移動42.5mm
13. 使用拉伸指令將前隔板設為1.5mm
14. 使用拉伸指令將後隔板設為2mm
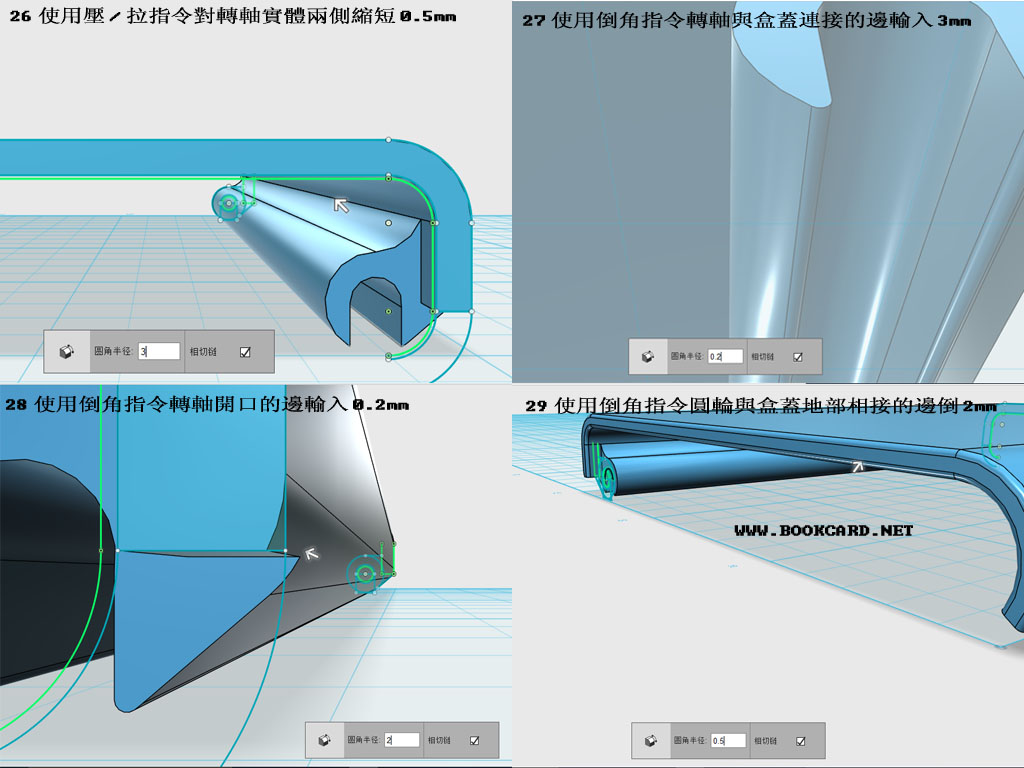
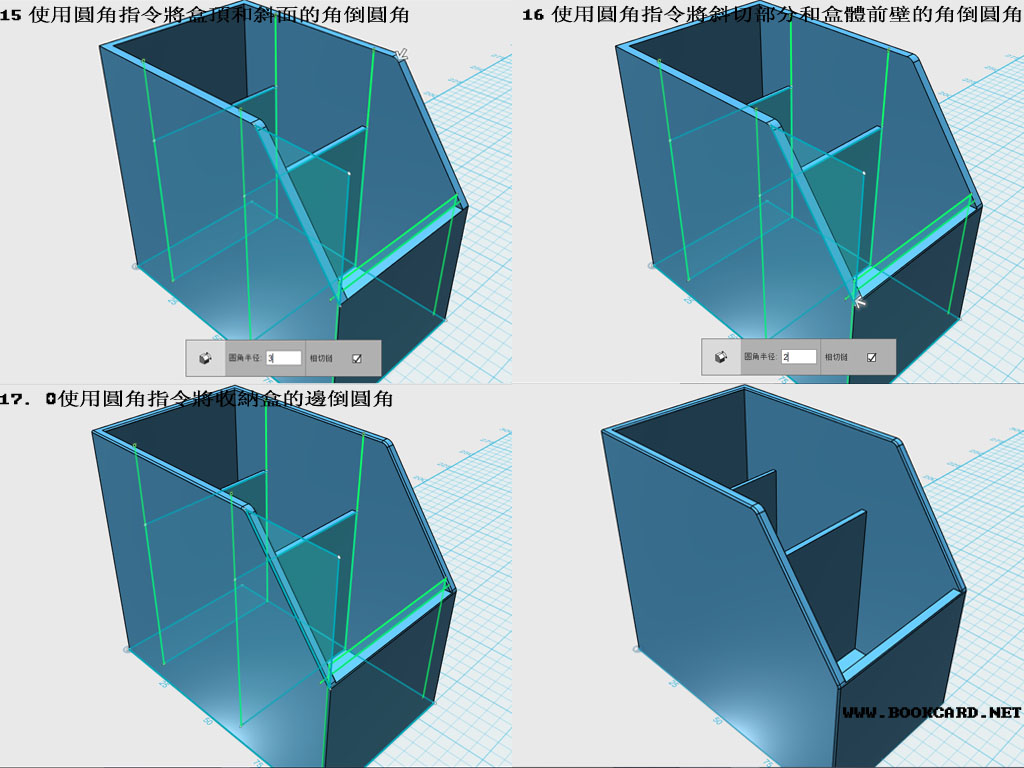
15. 使用圓角指令將盒頂和斜面的角倒圓角,圓角半徑設為3mm.
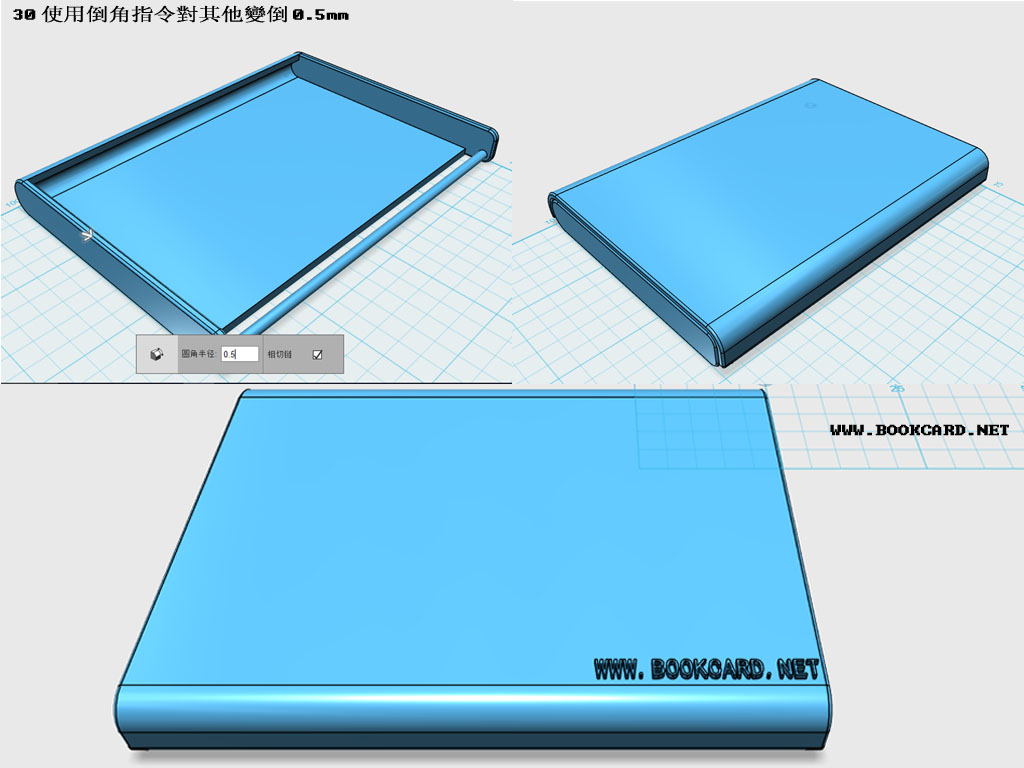
16. 使用圓角指令將斜切部分和盒體前壁的角倒圓角,圓角半徑設為2mm.
17. 使用圓角指令將收納盒的邊倒圓角,圓角半徑設為0.5mm.
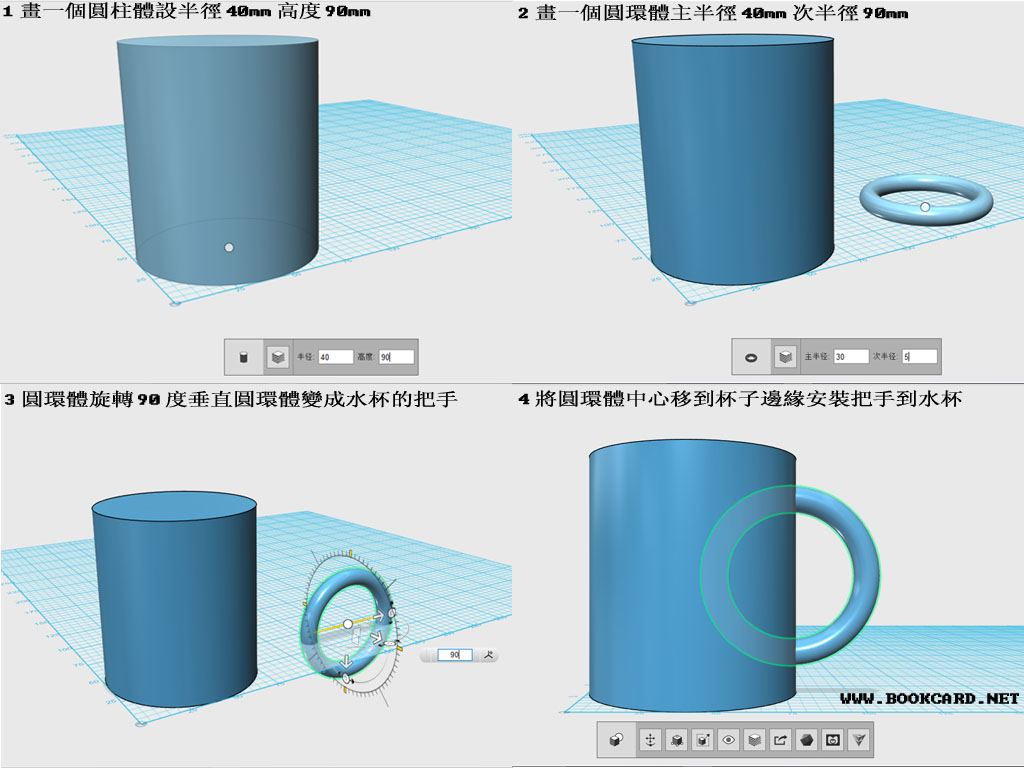
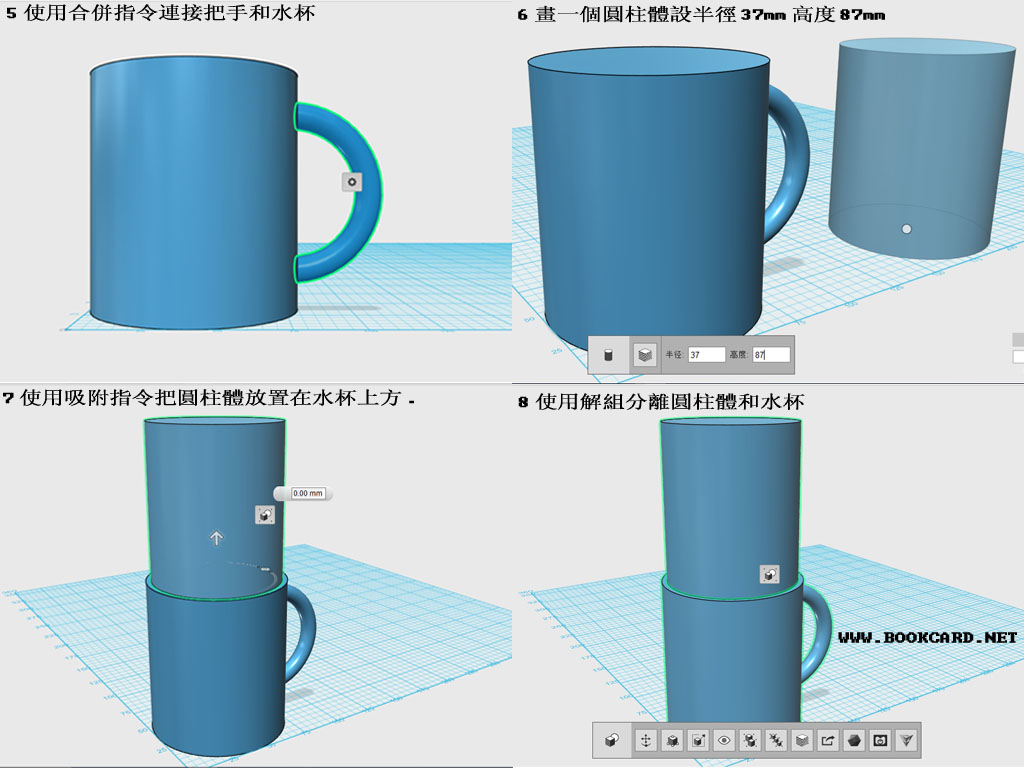
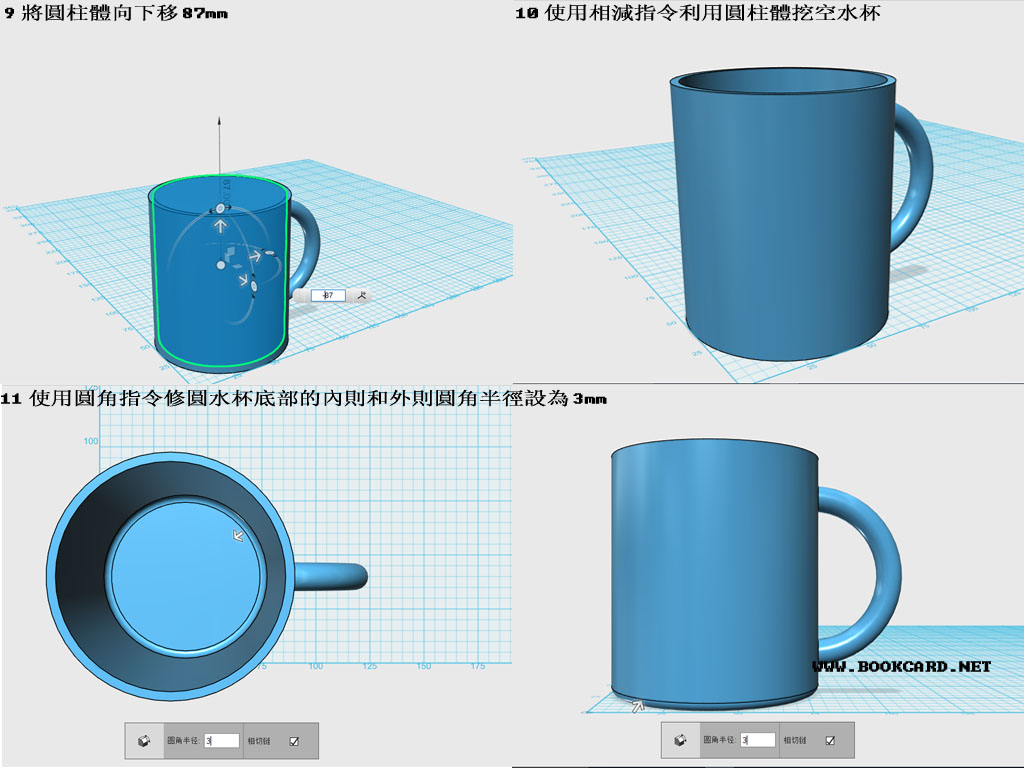
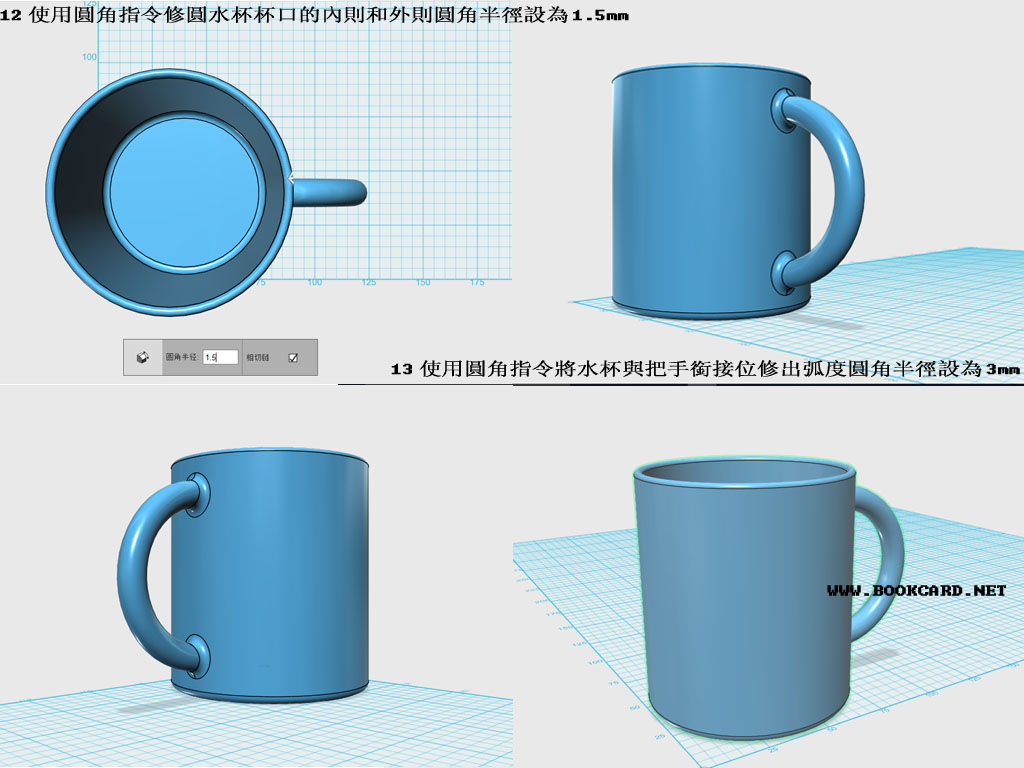
3D打印-製作水杯3D模型
Autodesk 123D Design製作水杯3D模型
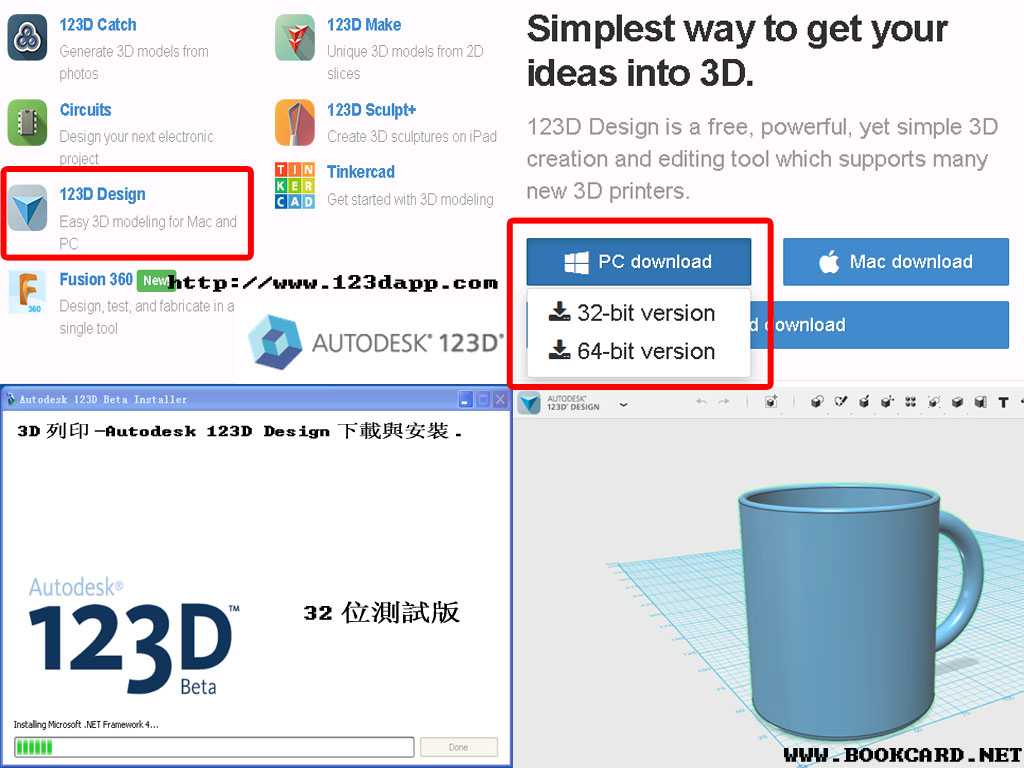
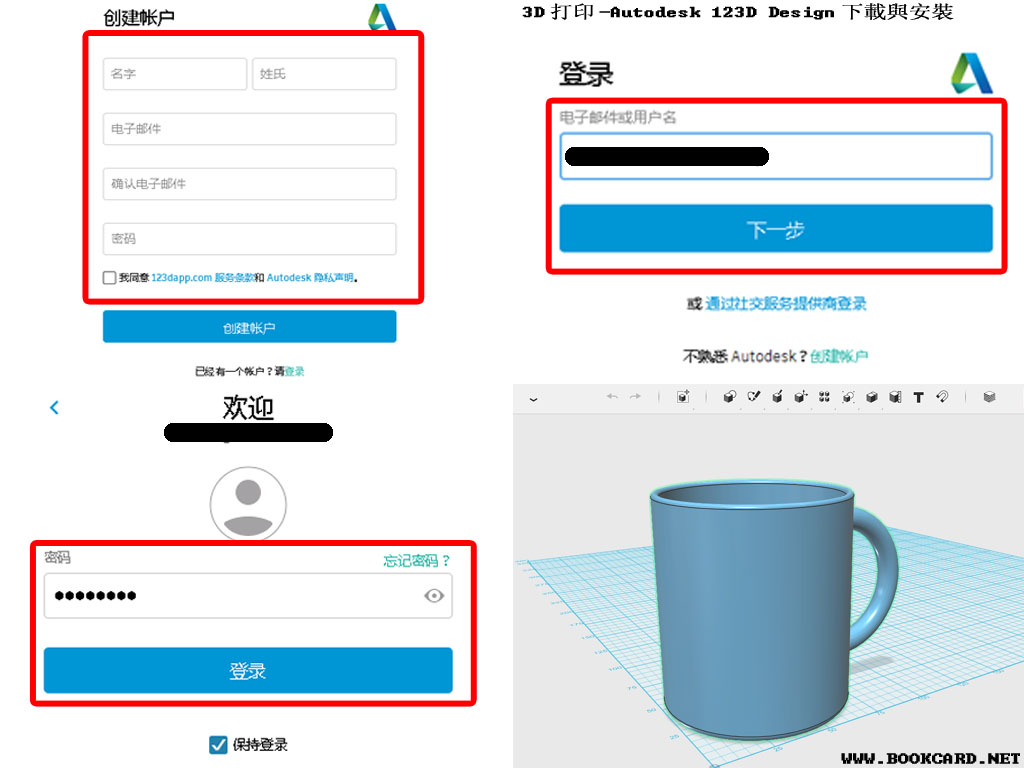
3D打印-Autodesk 123D Design下載與安裝.
Autodesk 123D Design可以去他們的官網http://www.123dapp.com下載.如果你是Win64位系統,請不要下載Win32位版本,請下載與自已系統匹配版本.
安裝Autodesk 123D Design需要一個Autodesk帳號,創建帳號只要一個電子郵箱即可.
最新PC正式版位版本可以使用XP系統.
Autodesk 123D Design PC Win32(32位正式版)
http://labs-download.autodesk.com/us/labs/trials/worldwide/123D_Design_R2.2_WIN32_2.2.14.exe
Autodesk 123D Design PC Win32(64位正式版)
http://labs-download.autodesk.com/us/labs/trials/worldwide/123D_Design_R2.2_WIN64_2.2.14.exe
Autodesk 123D Design PC Win32 Beta8 (32位測試版)
http://labs-download.autodesk.com/us/labs/trials/worldwide/Autodesk_123D_2012Beta8_English_Win_x86.exe
Autodesk 123D Design PC Win64 Beta8 (64位測試版)
http://labs-download.autodesk.com/us/labs/trials/worldwide/Autodesk_123D_2012Beta8_English_Win_x64.exe
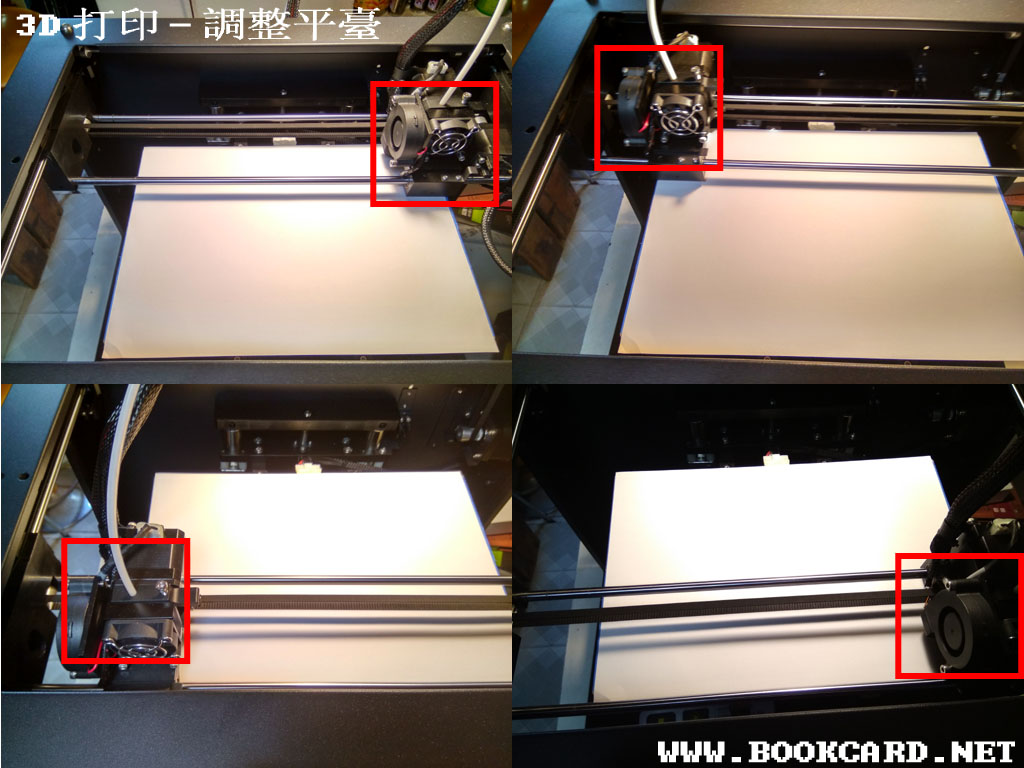
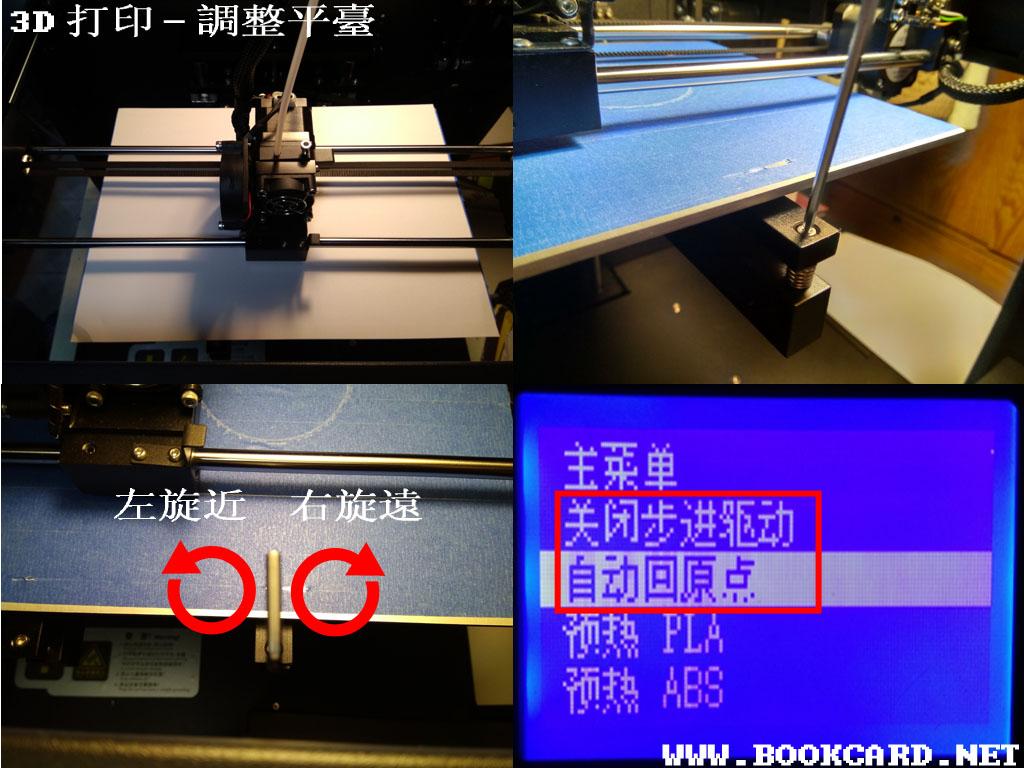
3D打印-調整平臺
若平臺離開噴嘴距離遠,則右旋該螺絲,鬆開彈簧.
若平臺離開噴嘴距離近,則左旋該螺絲,壓縮彈簧.
部驟3重複多次則可完成調整.
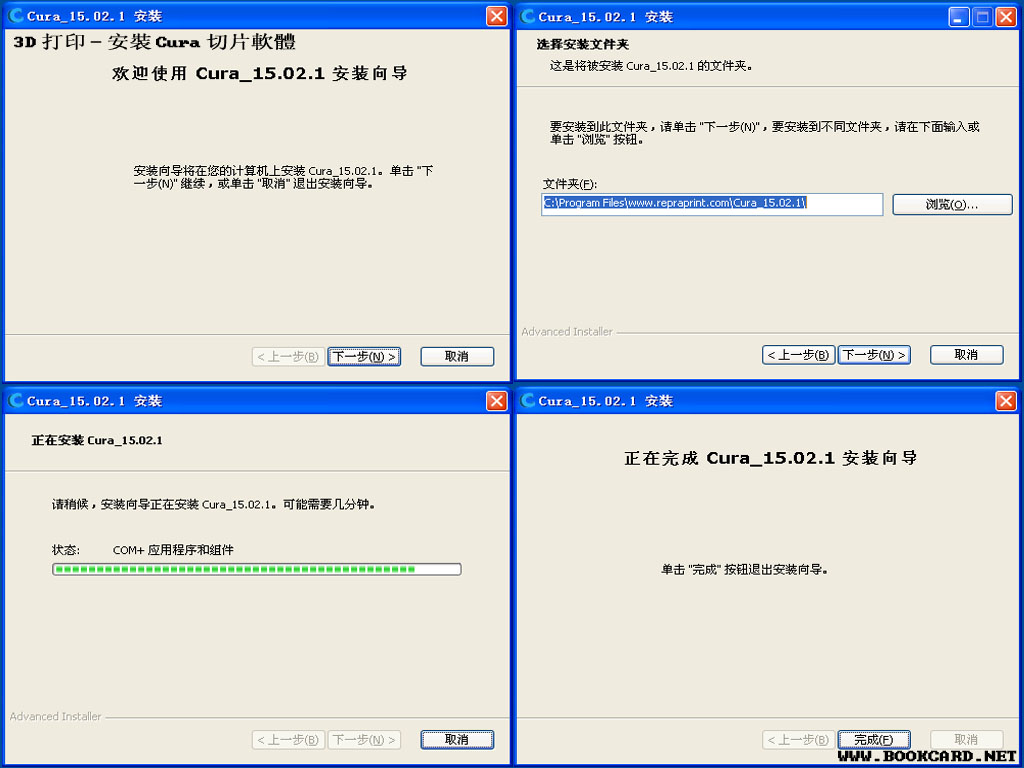
3D打印-安裝Cura切片軟體
Cura切片軟體是由ultimaker開發的軟體,你可以從下面的連接下載最新的版本
https://ultimaker.com/en/products/cura-software/list
安裝Cura很簡單,不過需要設置機器的參數.
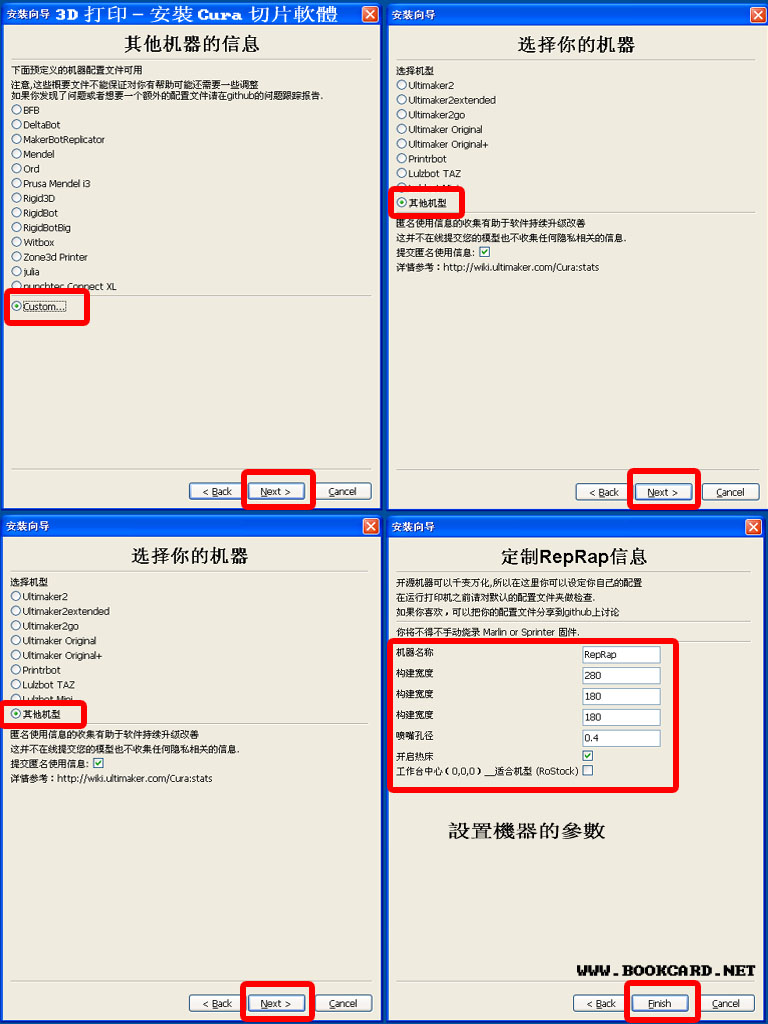
1. 添加新機器嚮導,或者在”菜單’的”機型”點擊”運行添加新機器嚮導”
2. “選擇機型”選擇”其他機型”,點擊”下一步”.
3. “其他機器的資訊”選擇”custom”,點擊”下一步”.
4. 定制RepRap信息.
5. 機器名稱:隨便填.
6. 構建寬度:打印平臺的寬度,這裏填280mm
7. 構建深度:打印平臺的深度,這裏填180mm
8. 構建高度:打印平臺的高度,這裏填180mm
9. 噴嘴孔徑:打印頭噴嘴孔徑,這裏填0.4mm
10. 開啟熱床:選擇
11. 工作臺中(0,0,0):不要選擇
12. 點擊”Finish”完成.
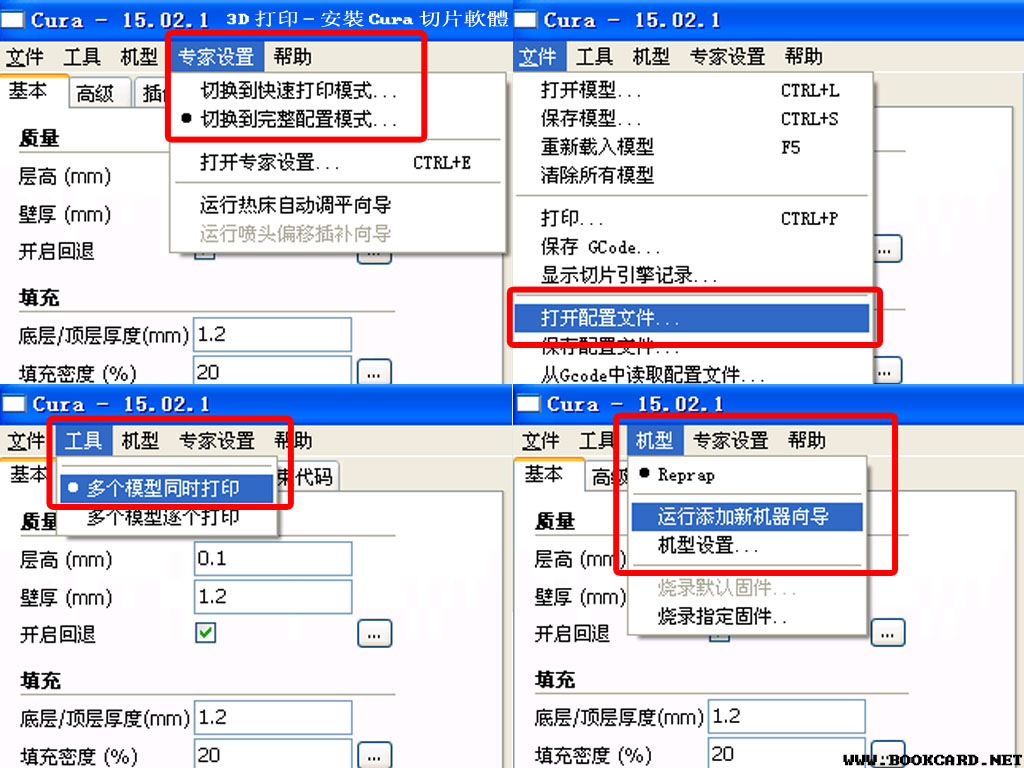
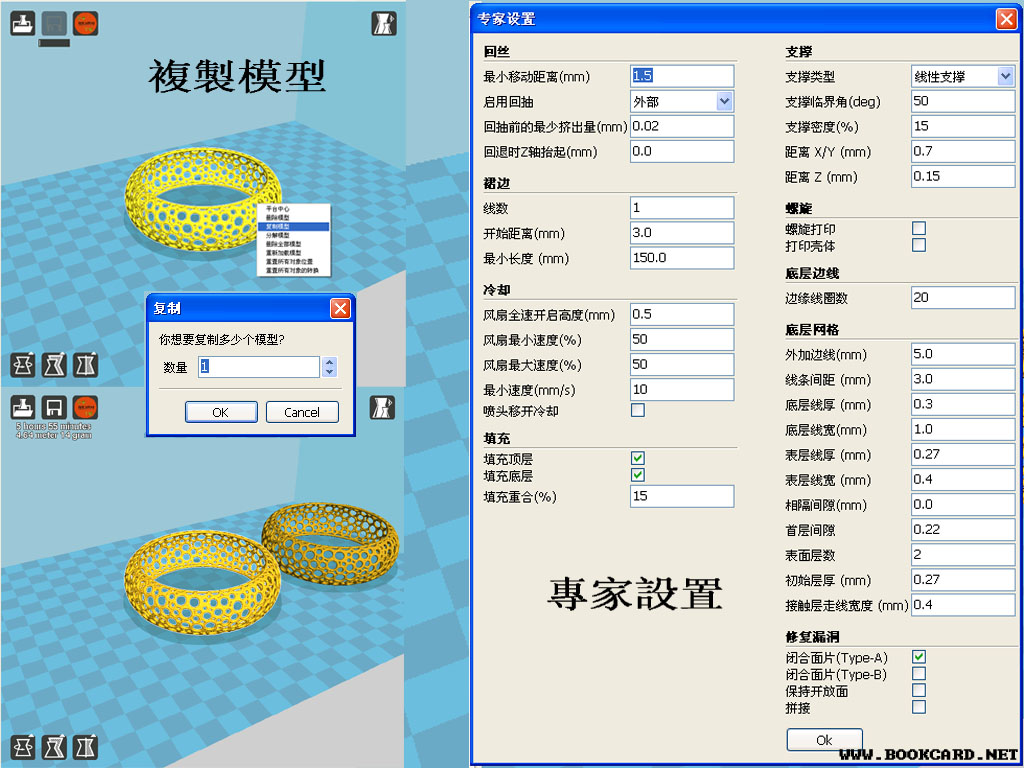
在”功能表’的”工具”點擊”多個模型同時打印”
若,多個模型逐一打印,前一個模型打好後,回影響後一個模型的打印,更可能造成3D打印机的損壞,所以要選則”多個模型同時打印”
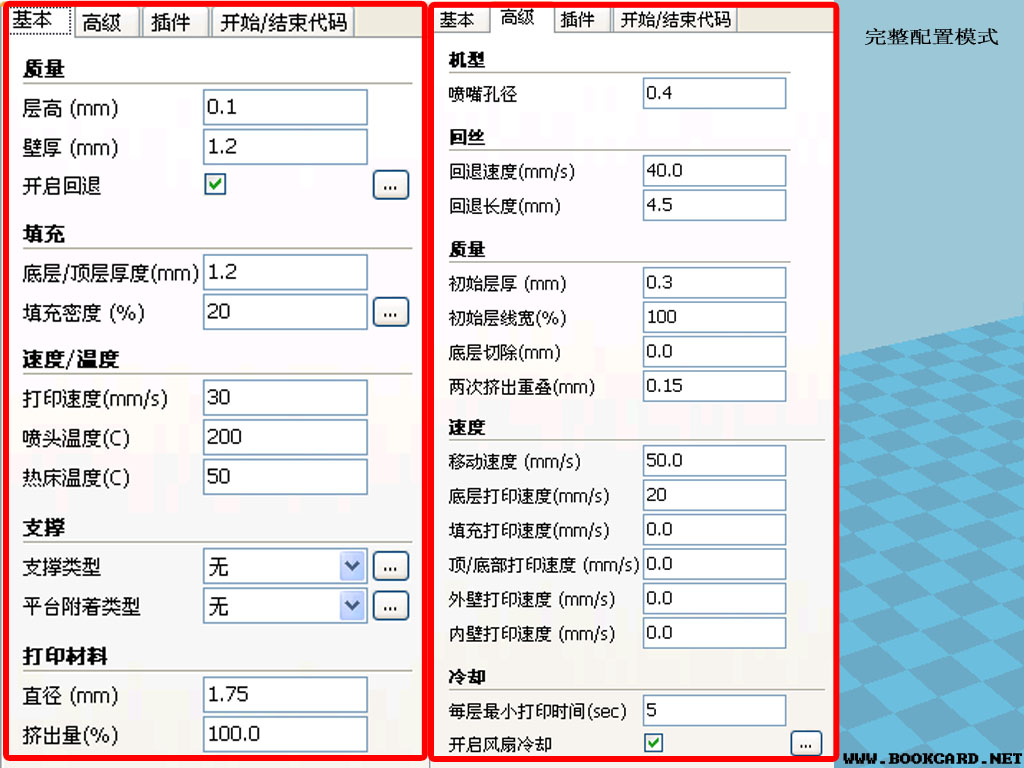
在”功能表’的”專家設置”點擊”切換到完整配置模式”
“基本”設置
層高(mm):層厚設置可以填0.1-0.3.
填0.1打印精度最高但時間最長
填0.2打印精度較佳時間是0.1一半
填0.3打印精度一般但時間短
壁厚(mm):外殼厚度,應選擇打印頭噴嘴孔徑的倍數. 壁厚越厚打引時間越長.
填1倍0.4壁厚太薄
填2倍0.8剛剛好
填3倍0.8更好但打引時間太長.
開啟回退:退絲是為了在打引中快速移動時,不讓溶融的絲在重力作用下漏出來影響外觀.
底層/頂層厚度(mm):
填0.6厚度並且填充密度小於20%,非常容易造成頂部有空洞,
填1.2厚度則比較好.
填充密度(%):密度與強度成正比,要求高強度則要提高填充比例.但是打印時間會增加.如果斜坡頂會出現堆料的情況.如果要求的強度不高10%則可.
打印速度(mm/s): 時間越長打印精度越好,時間越短打印速度越快,但容易出現品質問題.40-60打印速度穩定並可靠.
噴頭溫度(C)/熱床溫度(C):
打印速度快而且層高有比較大時可把溫度設置高一點.
打印速度慢而且層高有比較小時可把溫度設置低一點.
PLA: 噴頭溫度(C):190-220
熱床溫度(C):50-80
ABS: 噴頭溫度(C):245-255
熱床溫度(C):90-100
支撐類型:可以選擇”無”,”局部支撐”, ”全局支撐”,對於結構複雜並且有懸空模型需要填加支撐,全局支撐有能會落在模型上,造成表面不好看,通常造法是旋轉模型到某一個方位,儘量避免模型加支撐
無:表示不支撐
局部支撐:表示某些懸空地方加上支撐
全局支撐:表示所有懸空地方加上支撐
平臺附著類型:可以選擇”無”,”底層變線”, ”底層網格”,首層打印是手否添加輔助來確保模型粘合平臺的牢固性.
無:表示不需要添加,如果平臺已調平,並且已貼美紋紙.則選擇無此項.
底層變線:表示首層打的時後在模型的外邊緣打印線圈.
底層網格:表示首層打印格線後在繼續打印模型.但有時很難與模型分離.
直徑(mm):耗財的直徑,市面上買到的一般為1.75mm與3mm,數值填高會令出料變小,數值填低會令出料變多.
擠出量(%):正常情況下默認100%,如果發線實際出絲不足,可以適當增加這個值增加擠出,提高打印品質.
“基本”設置
噴嘴孔徑:打印頭噴嘴直徑,必需正確,它會被用於計算走線寬度,外壁走線次數和厚度.
回退速度
回退速度(mm/s):回退絲的速度,設定較高的速度能達到較好的效果,但是過高的速度可能回導致絲的磨損.使用預設值40即可.
回退長度(mm):回退絲的長度,設定為0是不會回退,設置4.5mm時效果最好.
初此層厚(mm):打印第一層的厚度,稍厚的底層可以讓模型和工作臺粘結的更好,設置0表示和其他層層厚一致.設置為0.3可以讓模型更容易剝離.
初此層線寬(%):第一層打印額外的線寬將使模型更好的粘合在工作臺,可以提高打印的成功率.也就是最底層的出絲比例,默認100%
.
底層切除(mm): 下沉模型默認0,下沉進平臺的部分不會被打印,當模型底部不平整或者太大時,可以使用這個參數,切除一部分模型在打印.
兩次擠出重疊(mm):雙打印頭設置,添加一定的重疊擠出,這樣能時兩個不同的顏色融合的更好.
移動速度(mm/s):移動噴頭時的速度,此移動速度指非打印狀態下的移動速度,不要超過150mm/s,否則可能造成同步電機丟步.
底層打印速度(mm/s):打印底層速度,這個值通常會設置的很低,這樣能使底層和平臺粘附得更好.
填充打印速度(mm/s):打印內部填充時的速度,當設置為0時,使用打印速度作為填充速度.高速打印填充能節省很多打印時間,但是可能會打印品質造成一定不良影響.
頂/底部打印速度(mm/s):打印頂部底部時的速度,當設置為0時,使用打印速度作為頂部底部速度.高速打印能節省很多打印時間,但是可能會打印品質造成一定消極影響.
外壁打印速度(mm/s):打印外殼時的速度,當設置為0時,使用打印速度作為外殼速度.使用較低的打印速度可以提高模型打印品質,但是如果外殼和內步的打引速相差較大,可能會對打印品質有一些消極影響.
內壁打印速度(mm/s): 打印內壁時的速度,當設置為0時,使用打印速度作為內壁速度.使用較高的打印速度可以減小模型的打印時間,需要設置好外殼速度,打印速度,填充速度之間的關係.
每層最小打印時間(sec):打印每層至小要耗費的時間,在打印下一層前留一定時間讓當層冷卻.如果當前層會被很快打印完,那麼打印机回適當降低速度,以保證有這個設定時間.
開啟風扇冷卻:在打印起間開啟風扇冷卻,特別在快速打印時開啟風扇冷卻是很有必要的.\
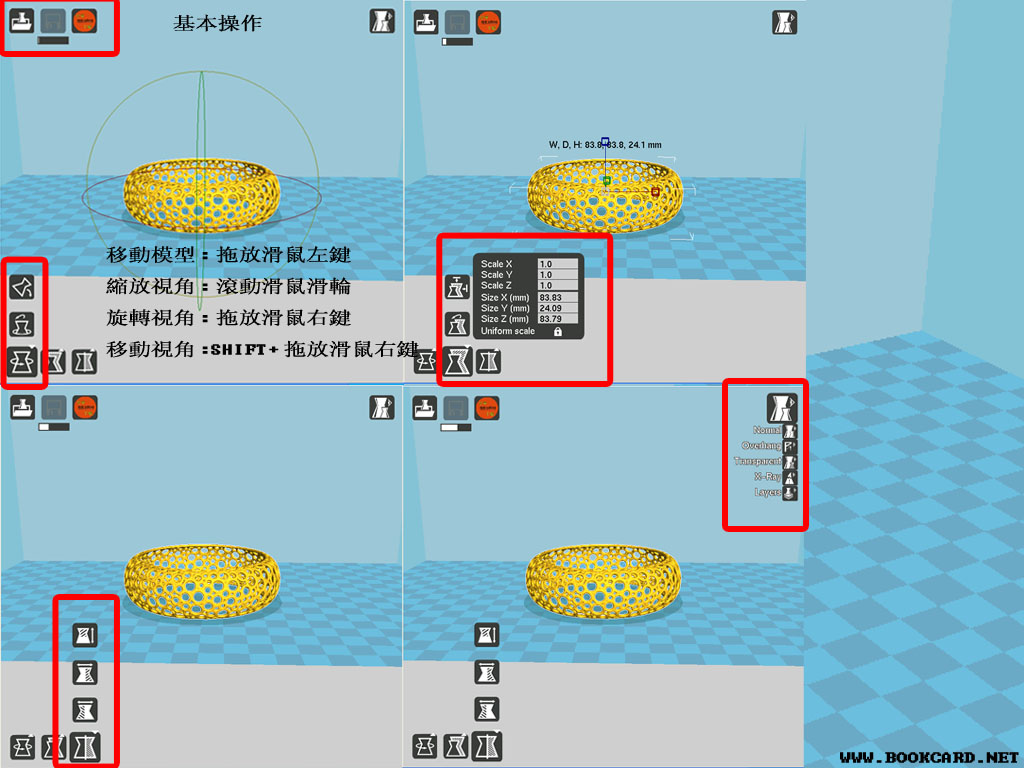
滑鼠操作:
移動模型:拖放滑鼠左鍵
縮放視角:滾動滑鼠滑輪
旋轉視角:拖放滑鼠右鍵
移動視角:SHIFT+拖放滑鼠右鍵
基本操作:
左上角有三個按扭,”打開”,”保存”,”分享”
打開:載入要打印的3D模型
保存:將3D模型的GCODE代碼保存成檔
分享:分享3D模型
模型操作:
滑鼠左鍵選中模型後,左下角彈出三個按扭,”旋轉”,”縮放”,”鏡像”
旋轉:旋轉模型儘量避免懸空地方加上支撐.
逐度旋轉:SHIFT+滑鼠左鍵
綠色:旋轉X軸
黃色:旋轉Y軸
紅色:旋轉Z軸
放置平臺:將模型放置在打印平臺上
重置設置:恢復模型
縮放:旋轉模型,可以設置縮放比例,或指定數值
最大放大:將模型放大到最大打印尺寸
重置設置:恢復模型
鏡像:對模型進行相反的打印
Z軸鏡像: Z軸相反的打印
Y軸鏡像: Y軸相反的打印
X軸鏡像: X軸相反的打印
視圖:右上角,單擊出顯五個按扭”Normal”,”Overhand”,”Transparent”,”X-Ray”,”Layers”
Normal:標準視圖最常用
Overhand:用紅色顯示懸空的位置
Transparent:透明視圖
X-Ray:X光檢查
Layers:模擬打印的動作和步數
模型功能表:選擇模型然後單擊滑鼠右鍵
平臺中心:
刪除模型:
複製模型:
分解模型:
刪除全部模型:
重新載入模型:
重置所有物件位置:
重置所有物件的旋轉
在”菜單’的”專家設置”點擊”打開專家設置”
最小移動距離(mm):在設定的最小範圍不回絲,避免頻繁回絲影響打印效果
啟動回抽:為了防止打印當中模型拉絲會出現破洞.可以選擇”全部”,”外部”,”內部”
全部:打印頭移動直接從起點到終點,它總是會收回.
外部:將只在打印模型的外表面啟用回抽.
內部:將在除打印模型外表面打印其他都啟用回抽
回抽前的最小擠出量(mm):最小擠出量一般使用在回抽需要反復發生的時候它可以避免那些頻繁回抽導致的耗財挖坑現象.
回退時Z軸抬起(mm):當回退完成時,移動的時候打印頭回升起一定的高度,0.075mm此選項對於打印塔類物品有宜.
線數:裙邊是畫在模型第一層外的一條線,可以幫助你準備好你的擠出機讓其處處於充滿狀態,同時可以看到模型是否適合於平臺.設置為0將關閉裙邊功能.多條裙邊可以幫助你的擠出機是否適用於打印小一點的模型.當你模型尺寸打到打印極限尺寸時最好設為0關閉.一般設為1即可.
開始距離(mm): 裙邊與打印第一層的距離,這是最小距離.多條群邊線將從這個距離向外擴.
最小長度(mm):裙邊的最小長度,如果最小長度沒有達到這個值,將自動添加更多裙邊線來大這個最長度.如果線的數量設置為0,這選項將被忽略.
風扇全速開啟高度(mm):風扇全速開啟的高度,在此之下速度回被從0開始線性分配.這是為了增加對底板的粘附能力,通常不會打印一開始的時候就用風扇冷卻.
風扇最小速度(%):當風扇打開時,它的起始速度為此設置.如果某層需要冷卻,風扇速度將會在低速和高速中調節,這個速度在不需要冷卻的層中使用.
風扇最大速度(%):如果某層需要冷卻,風扇速度將會在低速和高速中調節,這個速度會在那寫需要200%冷卻的層中使用.
最小速度(mm/s):最小層時間可能會到時機器打印速度下降,從而導致漏液,這個最小送料速率是用來阻止此類情況的.即便機器速度下降,也不會低於這個速度.
噴頭移開冷卻:當最小打印速度被啟動,需要冷卻時升起打印頭,然後等待到冷卻時間達到.但是這種方式會造成擠出頭漏液.
填充頂層:打印一個堅實頂部表面,如果不勾選,將會以設置的填充比例打印,對於打印花瓶等比較有用.
填充底層:打印一個堅實底部表面,如果不勾選,將會以設置的填充比例打印,對於打印建築類比較有用.
填充重合(%):內部填充和外表面的重合交叉程度,填充和外表面交叉有助於提升外表面和填充的連接堅固性.
支撐類型:支撐的結構類型,分別有”線性支撐”和”網路支撐”
網路支撐:比較結實的結構,能夠一次性剝離,但是有時候太結實.
線性支撐:相對更容易去除.
支撐臨界角(deg):在模型上判斷需要生成支撐的最小角度,0度是水準,90度是垂直.角度形成支撐與被支撐物體的距離,太近難剝離,太遠下懸拉絲會影響外觀.
支撐密度(%):支撐的填充密度,較小的支撐將有利於拆除,設置15%可以取得不錯的效果.
距離X/Y(mm):支撐距離模型在X/Y方向的距離.
距離Z(mm): 支撐距離模型在Z方向的距離.
螺旋打印:在一個Z方向幫助打印光滑的功能,它在整個打印過程中會增加Z,這個功能可以使的打印物體薄壁有結實底部.
打印外殼:只在模型表面(外壁)進行螺旋打印,沒有填充,也沒有上下面,其他的都沒有.
邊緣線的圈數:多行意味著更大的邊緣更方便模型粘合熱床,但這也會使你有效的打引區域變小.
外加邊線(mm):如果啟用底層網路工能,這是額外的木筏周圍物件重疊,可以很好的保證模型和工作臺的粘結.
線條間距(mm):底盤線與線之間的距離,默認設置為1mm,可以根據實際情況修改.
底層線厚(mm):指底層網格的底部線厚度,默認設置為0.3mm,可根據實踐情況修改.
底層線寬(mm):指底層網格的底部線寬度,默認設置為0.7mm,可根據實踐情況修改.
表層線厚(mm):指底層網格的表面線厚度,默認設置為0.2mm,可根據實踐情況修改.
表層線寬(mm):指底層網格的表面線厚度,默認設置為0.2mm,可根據實踐情況修改.
相隔間隙(mm):底層和表層的間隙,在使用PLA時0.2mm左右的間隙可以很好的剝離底座.
首層間隙(mm):打印底盤和模型的首層之間的間隙,0.2mm的距離可以讓PLA模型更容易去除.
表面層數:3D打印底盤的最後全封閉的層數,可以讓模型拆除支撐後有相對好的效果.
初始層厚(mm):表面層的後度
接觸層走線寬度(mm):表層線寬.
閉合面片(Type-A):這個選項會組合所有的打印物體到一起,結果是一般是內部空隙消失了,取決於物能否這樣做.A類型是比較正常的,會儘量保持所有的內孔不變.B類型會忽略所有的內部孔.
閉合面片(Type-B): B類型會忽略所有的內部孔.
保持開放面:保持模型中的所有空洞和破面.,也就是講所有的空洞破面依然是存在的.使用不當回直接影響切片路徑錯誤,請謹慎使用.
拼接:拼接選項是在切片時嘗試恢復那些開放的面,變成閉合的多邊形,但是這個算發非常消耗資源,甚至使得處理時間大大增加.和所有修正錯誤選項一樣,實驗性質,風險自擔.
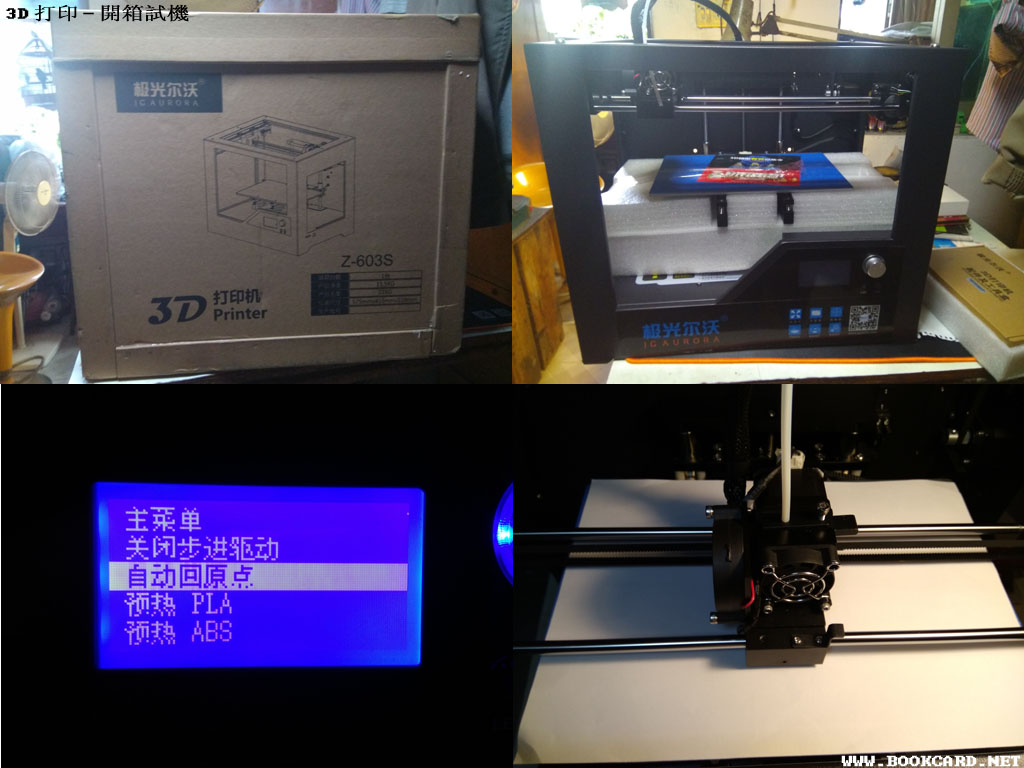

3D打印-開箱試機
3D打印机到貨,在拿出3D打印機時,只能拉機箱橫粱,千萬不能拉Y軸導軌.按旋轉按扭安準備按自動回到原點,起平臺取出泡沫.在附件有Ultimaker的Cura切片軟體,安裝並設置參數後則安裝完成.
不過你3D打印之前你須要調整平臺,讓打印頭在平臺的四個角保持0.2mm距離,一張A4打印紙厚度, 螺絲右旋則降底平臺. 螺絲左旋則升高平臺. A4紙塞在平臺與噴嘴中間,令A4紙能正常抽拉出並附帶一定阻力.則平臺調整完成.
安裝耗材你需要預熱打印噴頭,並安裝耗材架,耗材盤放在耗材架上. 耗材穿過通料管到出到打印喷头, 耗材前端剪一個小斜口,把耗材捋直,一手向下插料,另一手向下壓壓倒一切塊,直到耗材從打印噴頭擠出口, 噴嘴出料大小均勻則完成耗材安裝.
對3D模型進性切片生成GCODE代碼並保存在SD卡裏,SD插入印表機後就可以打印.上圖為我試打的手鐲.撕起美紋紙取出模型.

遊戲顯微鏡LudusScope
斯坦福大學的生物工程助理教授Ingmar Riedel-Kruse英格瑪·裏德爾-克魯斯開發的顯微鏡,由3D印表機製作主要部件,電力有智慧手機供電, 配備了一個操縱杆, 使用4盞LED燈響應, 操縱微生物的游泳方向,你可以從智慧手機螢幕中看到”眼蟲”單細胞微生物游泳.
眼蟲單細胞微生物在顯微鏡載玻片上遊動,對LED燈光作出反應, 每個眼蟲都可以通過操縱杆控制, 操縱杆控制LED燈, 一點點燈LED燈光會吸引眼蟲. 太多的燈光則會把他們趕走. 用戶可以通過經由觸摸屏數位選擇眼蟲進行交互.
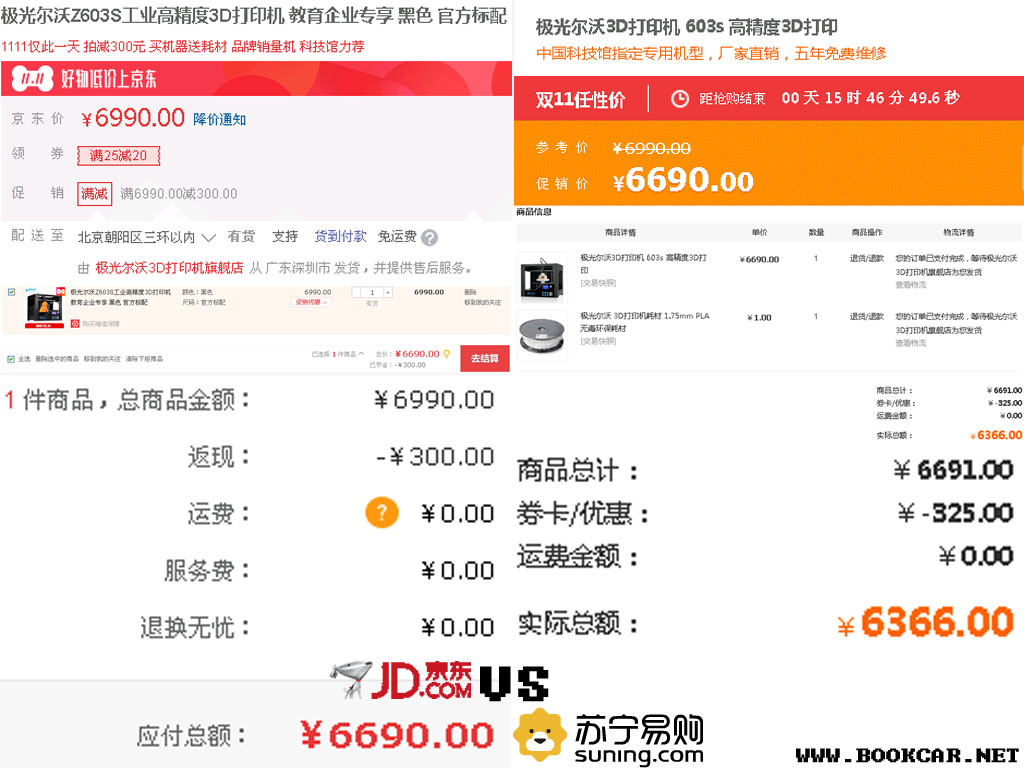
雙11光棍節京東蘇寧對決
京東以網上起家並建立全國快遞銷售網路,蘇寧以實體店起家在網路平臺則慢了一手處處受制.下面的這個例子講講兩者的降價優惠力度.
極光爾沃3D印表機 Z603s,在雙11之前京東蘇寧原價均為6990,京東平時減150元,蘇寧預告雙11當天減300元,到雙11當天京東立馬變招也立減300.不過蘇寧是原價標為6690後再減300,也就是減600,外加一元送PLA列印耗材,原價是130元優惠129元,(京東原價也是130)加上套裝自帶的PLA列印耗材,一共有兩卷.外加極光爾沃兩張優惠卷可同時用,一張2元一張5元.我們計算蘇寧比原價減左幾多300+300+5+25+129=754,如果不算129也優惠625.
過了雙11網店兩家都恢復了原價,蘇甯平時是無減價,而京東平時也減價150元.所以在平時則應京東購買.
在這裏講這個例子並不是講蘇寧一定比京東便宜,而是要多比較幾間網店.才能找出最優惠價格.
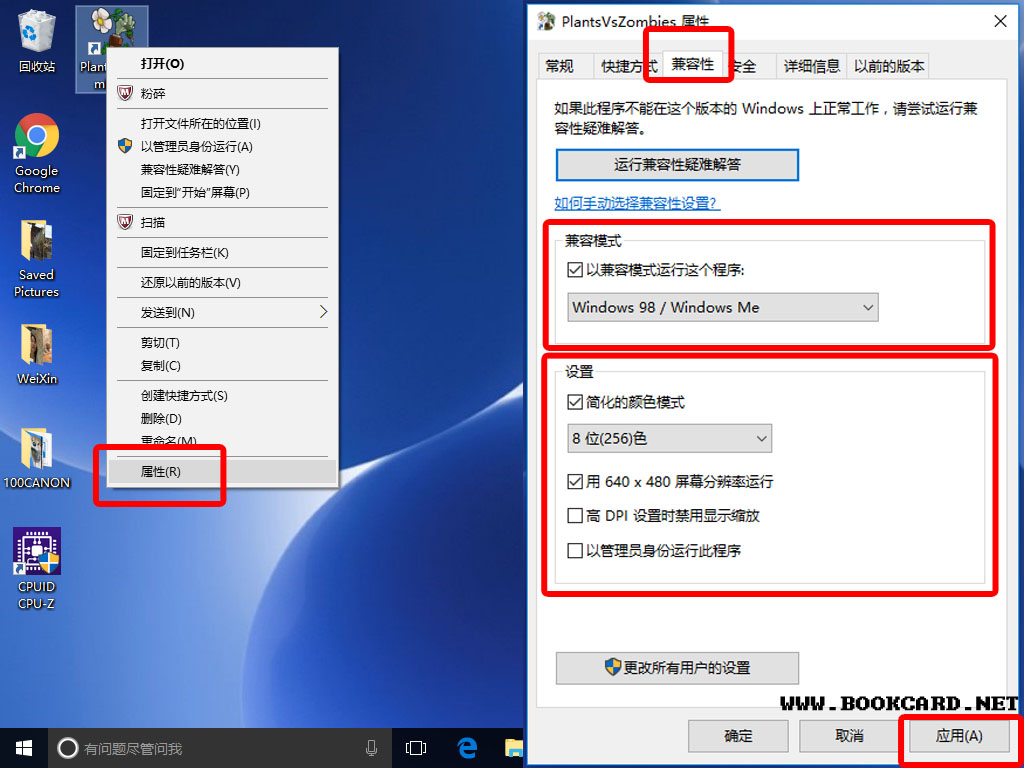
Windows10兼容老舊遊戲
如果想在Windows10玩老舊遊戲,嘗試更改程式兼容性,就能在全屏模式下運行.
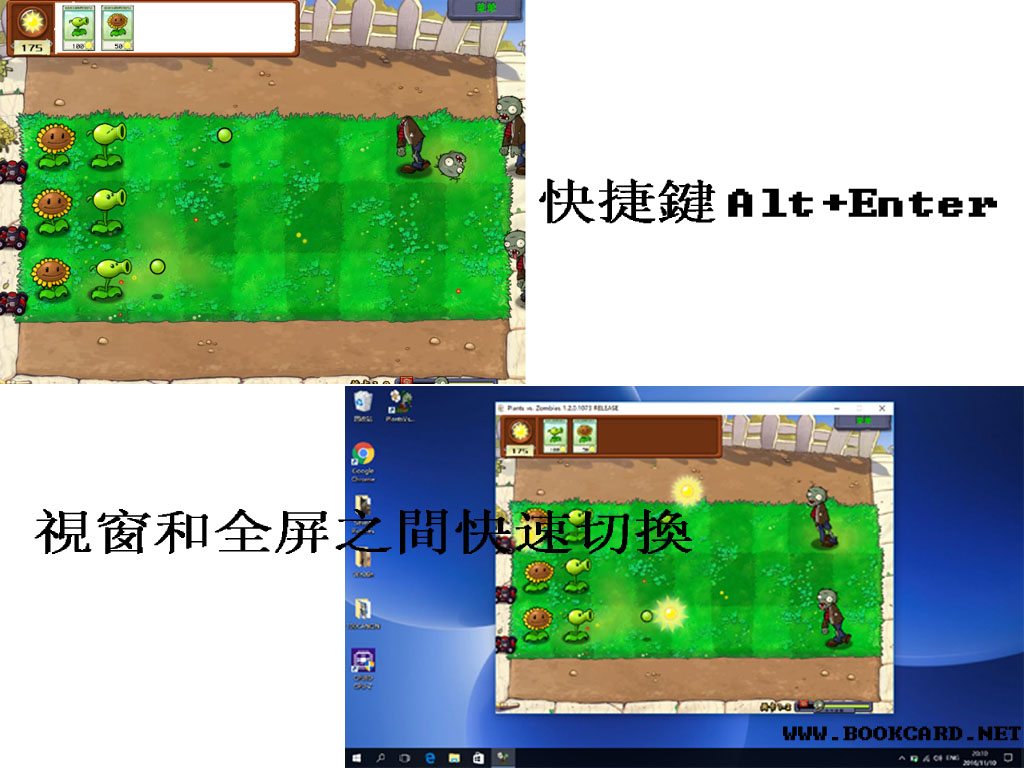
Windows10遊戲視窗與全屏之間快速切換
遊戲視窗模式與全屏模式快速切換使用快捷鍵Alt+Enter
Dell Inspiron 15 3000 Series評測
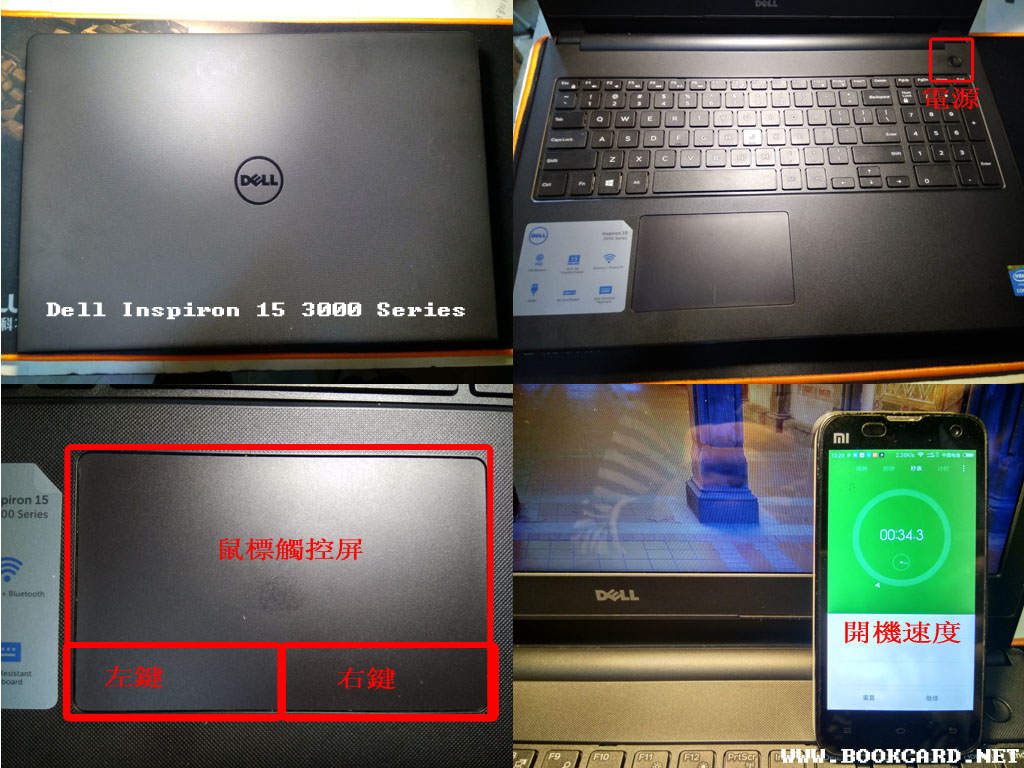
因為媽咪去美國探她大佬隨手買台Dell Inspiron 15 3000 Series 未含稅275美元. 稅率為8%.平常媽咪自已使用.不過對於還在使用二手IBM-T60P WinXP我嚟講是見識高科技.
電源開關在鍵盤右上角.CPU是Intel Core i3 515U主頻2.1GHz發熱量很低,與T60P熱到死機形成鮮明對比,電池續航時間4小時,T60P安裝9節電芯也只能2小時.最重要重量輕外出方便.4GB-DDR3記憶體對於64位的Win10系統太小太小.
顯卡是CPU自帶共用1GB記憶體.因為本人第一部電腦就是主板自帶顯卡.所以對於自帶顯卡很反感.所以是一大敗筆.
自帶多合1讀卡器這個倒是很實用.因為SD卡很常用.
鍵盤自帶有小鍵盤,Caps Lock鍵自帶燈,而Num Lock鍵就沒有燈,這有點不方便.
1TB硬碟但沒有劃分出擴展分區,自帶光碟和說明書媽咪嫌重在美國當飛碟仍了.暈X3.開機速度超過30秒還算可以.開機速度與硬體驅動,自啟軟體和硬碟讀取速度有直接關係.我在Win98時代我見過秒開.
15寸16:9軟屏上下左右可視角度很差,而且色彩不是很好. 與『IBM-T60P』15寸硬屏無法對比.影片輸出是HDMI沒有VGA,因位本人顯示器是太陳舊沒有HDMI,所以無法連接顯示器.
其鼠標觸控屏初用有點不爽.左右鍵要下按才有反應.還是買個無線USB滑鼠.
此電腦乃中國製造,只是在地球轉了一圈.
佳能4色打印機注墨教程


打印機以是家用和辦公的必用品.但原裝或兼容墨盒價格昂貴,能注墨無需維護的佳能Canon打印機吸引很多用戶的選擇.如果你有大量打印的需求則應改裝連供系統,否則應注墨.
購買4色CMYK墨水,佳能有原裝墨水只是價格昂貴,買兼容墨水可以了,選擇便宜的就可以了沒有分別的.4色分別是CMYK:C藍色,M紅色,Y黃色,K黑色.
打開佳能打印機保護蓋,墨盒會自動移出待停定後,把墨盒保護曹按下拿出墨盒,左則的是彩色,右則的是黑色.撕開墨盒上的貼紙,黑色墨盒的氣孔在中間,彩色墨盒有3個氣孔分別是藍色紅色黃色.最上面的孔是紅色,左下角是藍色,右下角是黃色.
先用卡尺量針孔的直徑,量的1.2mm,需要找支大0.1-0.2mm的轉嘴,因為墨盒壁薄不用轉床也可.墨水的注射一定要注意,千萬不能貪多,否則只有會造成浪費.黑色墨盒注射5-8毫升(ml)大約一格,藍色紅色黃色注射3-4毫升(ml)大約半格.墨水要慢慢注射不要外溢,有一點要特別注意墨盒的氣孔是不能堵死的.把墨盒裝回列印機會自動識別.
耳塞(In-Ear)耳機選構


耳塞(In-Ear)耳機分為了入耳式和非入耳式兩種,入耳式耳塞進入耳道的距離較深, 非入耳式耳塞進入耳道的距離較短,通常卡在我們的耳蝸處.
入耳式和非入耳式之選
因為兩者之分是耳道的距離深淺,因入耳式的發聲振膜離的耳膜更近,音效更好更出色,而且貼緊耳道隔音效果很好,首選在嘈雜地方使用.而且使用矽膠耳套配帶上非常舒適.而非入耳式的配帶卡在耳蝸處,因為離耳膜較遠.音效通常會差一點.而且它通常使用硬膠配帶時間一久耳蝸會很疼.所以應儘量選購入耳式耳塞.
價格之選
除非你是音響發燒友,否則你不應去購買高價的耳塞耳機,耳塞耳機屬於易損耗品,其使用壽命並不取卻於耳機發聲結構,而是取卻於耳機線粗細.耳機線越粗越耐用,耳機線越細越易損壞,看你使用過程中是否經常大力的拔線拉扯.上圖有一款耳機帶拉鏈的特色,抗拉扯能力未知.
有線與無線之選
藍牙無線耳機因為無線設計使用壽命大幅度提高.而且無線耳機在日常辦公使用中非常靈活.你試想有線耳機的耳機線插在電腦音效卡輸出口.如果要離開座位則要先摘下耳機,而藍牙無線耳機的10米傳送距離則無此類問題.只是藍牙無線耳機的電池容量通常較小要經常充電.要注意不是所有的藍牙無線耳機都支援音樂播放.
掛耳式耳機
掛耳式耳機又名運動式耳機,通常是用於跑步,掛耳式設計令其不易脫落,而且它線材的抗拉扯能力好一點點.但此類耳機價格會高一點點.平常使用則無需購買.
帶有麥克風
現在的耳機通常帶有麥克風,除非你經常用耳機聽音樂,否則使用上並無必要性,因為你此終要舉起麥克風到你的嘴邊.這和你舉起手機到你耳邊是一樣的.
太空之國/神的國度Asgardia

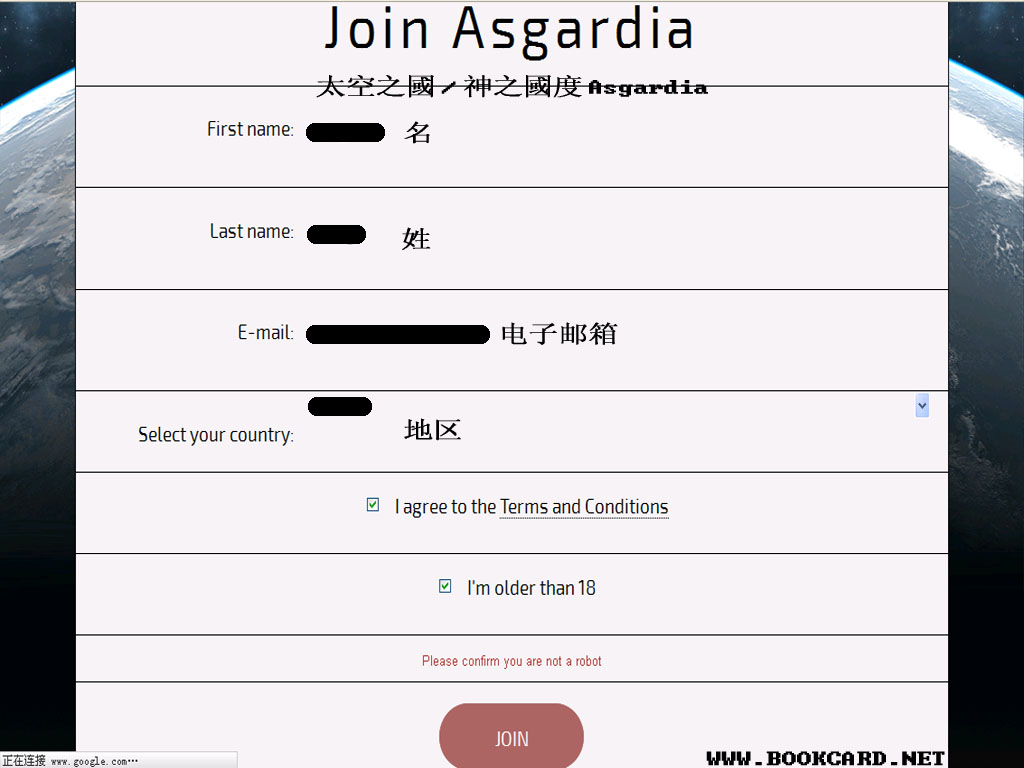

2016年10月12日,巴黎的一場新聞發佈會上太空之國Asgardia正式建國, 國名Asgardia該詞源於挪威神話中阿薩神族的地界,所有尊奉奧丁為主神的神明都住在這裏,是”神之國度”.
不過它沒有土地,也沒有人口.官方語言肯定英語.它現在只有一個在地球上的網站,不過它正在招收公民,任何人都可以伸請,不知到伸請成功是否有實物戶照? 而他正在徵集國旗、國徽和國歌,該項目由俄羅斯商人Igor Ashurbeyli推動,有幾多發展資金不太清楚,肯定要籌錢.而人類發展史上國由家組成.不知到這國的百姓如可成家? 地球上的法律不適用於太空,將會立太空法.
如果你問我會不會去這個新國家,我會肯定地回答你不會.你要記住當有人同你講,跟著我我會帶你去到美麗新世界,可以肯定的話你知,當你踏上新世界土地時,你會發現它其實是地獄.並且你坐的單程票,有去無回.
地球網站:http://asgardia.space
註冊帳號:http://asgardia.space/join
登記公民:http://asgardia.space/citizenship
國旗:http://asgardia.space/contest/flag
國徽:http://asgardia.space/contest/insignia
國歌:http://asgardia.space/contest/anthem
USB高速集線器(分線器)選購

隨著越來越多外設設備使用USB接口,而筆記本電腦和臺式電腦只有兩個或四個USB接口.如過外設設被過多這肯定是不夠使用的.
需要多小個USB接口? 那要數數你有多小USB設備.
如過只玩遊戲上網滑鼠鍵盤兩個USB接口就足夠了,無需額外購買USB集線器.
如果要日常辦公U盤,印表機,掃描移,攝像頭.那就要六個USB接口.
如果給手機充電(需2A電流)和USB移盤硬碟(占兩個USB接口)還需接上外置電源.那需要不小於七個USB接口.
USB接口需要開關嗎?
有些USB集線器為每個USB接口有個開口,這個很不需要的,你把設備插入就是要使用,不使用就拔掉.根本無需開關.而且品質最好的開關都有一定壽命,令USB集線器更容易損耗,降低使用壽命.反而為每個USB接口內置LEB工作燈更具實用價值.可以知道每個設備的工作狀態.
USB接口品質
USB接口品質也有好壞之分. 品質好的USB接口的彈片彈性很好不容量氧化.品質差的USB接經常接觸不良.使用的過程中經常斷開連接.而且還會損壞外設設備.特別是移盤硬碟.
USB傳送速度
| USB版本 | 理論最大傳輸速率 |
| USB1.0 | 1.5Mbps(192KB/s) |
| USB1.1 | 12Mbps(1.5MB/s) |
| USB2.0 | 480Mbps(60MB/s) |
| USB3.0 | 5Gbps(500MB/s) |
| USB3.1 | 10Gbps(1280MB/s) |
從上表可以得知USB接口的版本越高,傳送速度越快,版本1就不應購買.如過不使用USB硬碟或傳送大量資料購買2.0接口也可以.否則應購買USB3.0或以上.
老人機-小米MAX

因為老爸的手機是十幾年前工能機,而其經常自動關機.需要換部老人家使用的智慧機.老人機是指專門開發給老人家使用的手機,它需要有以下幾個特徵.
第一因為老人視力通常不太好,手指也不太靈活,所以手機螢幕要夠大要高清要靈敏,最好無需帶眼鏡也可以看清楚,字體要超大,6.44寸高清屏剛剛好帶出街也方便.
第二因為老人家聽力通常不太好,所以手機鈴聲要夠大.震子要有力.因為電話在身旁不接也沒用.實測鈴聲也夠大.自動去除背景嘈聲.而又保持通話品質.
第三老人家手機的續航時間要夠長,最好要超過48小時才充一次電,這樣在外面待長一點的時間都可以電聯.4850mAh鋰離子電池正常使用可兩日充電一次.
而且它價格適宜,全網通32GB才1299元.比降價只前便宜了200元.相機攝影效果奇好,可以在朋友自誇其攝影功力.
在一家小店鋪帖軟保護膜,但沒兩天就自動脫離,後來給老爸安裝淘寶,他自已定了個鋼化玻璃膜,整天玩微信.總之老爸超喜歡.
充電寶-飛毛腿
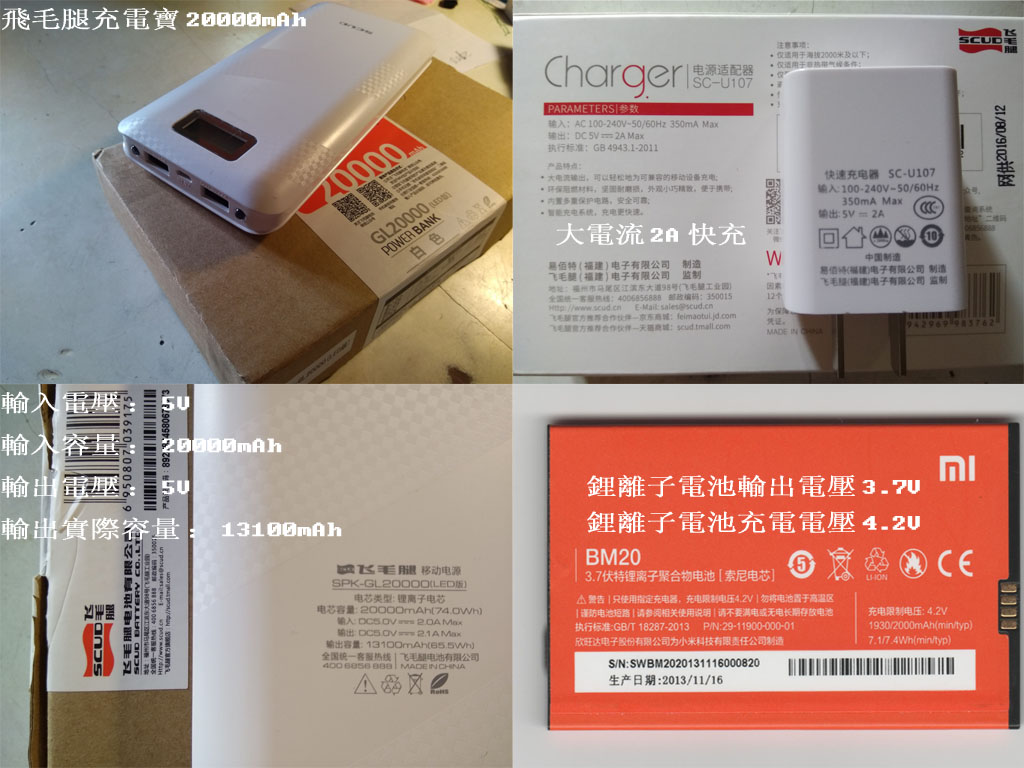
剛剛入手了一個飛毛腿充電寶20000mAh帶LED燈,不帶充電器的(需另外購買), 飛毛腿充電器大電流2A快充.因為很多人在網上提出很多問題. 如充電次數過小,充電時間過長,故科普充電寶的知識.此充電寶與充電器最後下場是一齊壞左,充電次數大約2到3次.
鋰離子電池輸出電壓3.7V(3.6V)
鋰離子電池充電電壓4.2V(4.1V)
鎳鎘電池輸出電壓1.2V
鎳鎘電池充電電壓1.8V
鎳氫電池輸出電壓1.2V
鎳氫電池充電電壓1.5V
電池的容量指的是能夠容納或釋放多少電荷,單位是安培時(Ah),毫安培培時(mAh)
能量值(Wh)= 容量mAh*電壓/1000
能量值(Wh)= 容量Ah*電壓
電池的能量標示的是電池能夠做多少功,單位是瓦時(Wh)
充電寶電芯能量值=20000mAh*3.7V/1000=74Wh
充電寶輸出能量值=13100mAh*5V/1000=6.5Wh
因為充電寶要輸出5V電壓,所以有轉換效率的問題.
轉換效率=(輸出實際電壓*輸出實際容量)/(電芯額定電壓*電芯額定容量)
飛毛腿充電寶的參數
輸入電壓:5V
輸入容量:20000mAh
輸出電壓:5V
輸出實際容量:13100mAh
轉換效率是=(5V*13100mAh)/(3.7V*20000mAh)
轉換效率是=65500/74000
轉換效率是=0.8851
轉換效率是=88%
如果充電寶沒有標出輸出容量我們可以通過轉換效率計算得出.
輸出容量=(電芯額定電壓 * 電芯額定容量 * 轉換效率)/ 輸出電壓
輸出容量=(3.7V*20000mAh * 0.8851)/ 5V
輸出容量=13100mAh
充電次數=充電寶輸出容量/手機電池容量
充電次數=13100 mAh /2000 mAh
充電次數=6.5次
充電寶充電會根據你的充電電流大小而不,電流越大充電越快,使用飛毛腿充電器大電流2A快充
充電時間=(充電寶容量x電芯電壓)/(輸入電壓x輸入電流x轉換效率)
充電時間=(20Ah*3.7V)/(4.2V*2A*0.8851)
充電時間=74 Wh /7.4
充電時間=10h

渦輪風力發電生產能源高效清潔幹靜可再生, 對減慢全球暖化起到關鍵的作用. 風力發電會逐漸在淘汰老式發電廠. 很多風力發電場都建在山頂上,因為越高風力會越大,通常風力流通地方正是數百萬年來候鳥和蝙蝠生存的地方.每年都有幾百萬隻蝙蝠和候鳥撞上風塔和風電葉片而死亡. 一些環保人士把能源工業以”違反瀕危物種法案”告上法庭.

“渦旋無扇葉”(Vortex Bladeless)
西班牙發明家大衛·亞涅斯(David Yanez)和勞爾·馬丁(Raoul Martin)發明新型的風能發電機. 它廉價,堅固,安裝簡單,安靜, 它稱為“渦旋”(Vortex). 它的頂部桅杆就像扇葉, 利用桅杆底部的兩個環形相斥磁鐵,當桅杆朝向一邊擺蕩,底部相斥的磁鐵便會將其推往另一方,因此無論風速如何,桅杆本身都能持續產生最大值震盪.它產生震盪傳輸到交流發電機再轉換為電能, “渦旋”發電機跟有扇葉風力渦輪機相比,產生的能源要少大約30%,製作成本少51%,但最重要不會對蝙蝠和候鳥構成威脅而受到環保人士起訴.一個12.5米高的渦旋無扇葉發電機就可提供4千瓦的電力. 為小公司,個人住宅提供電力,又或者為主電網輸送電力.
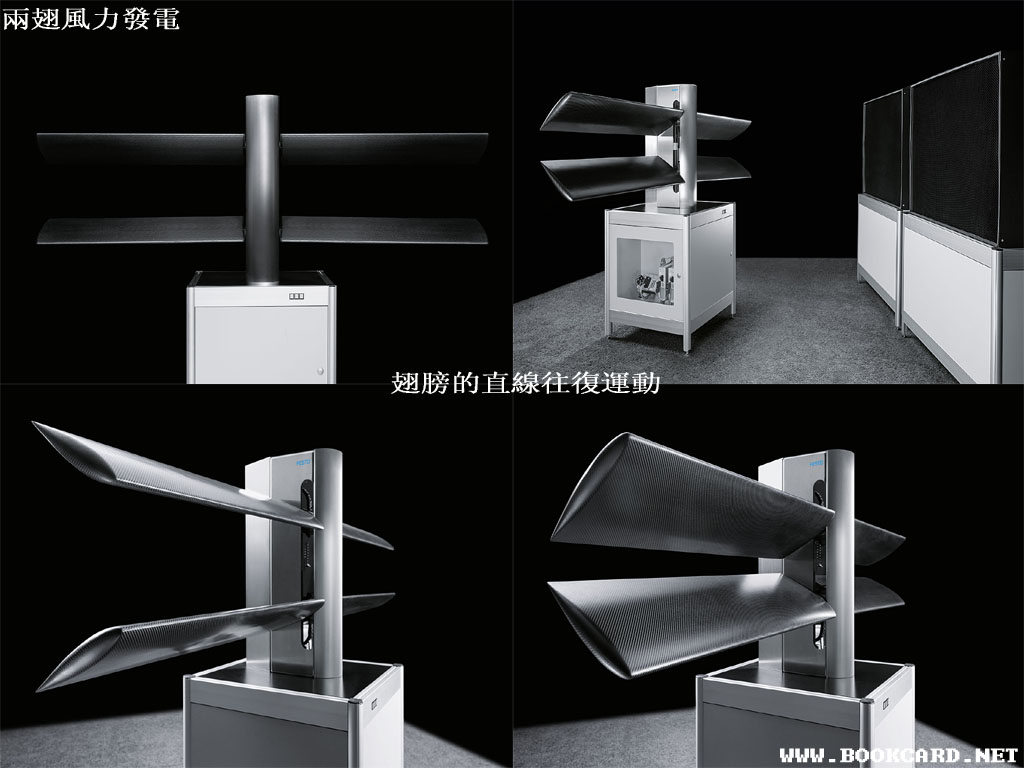
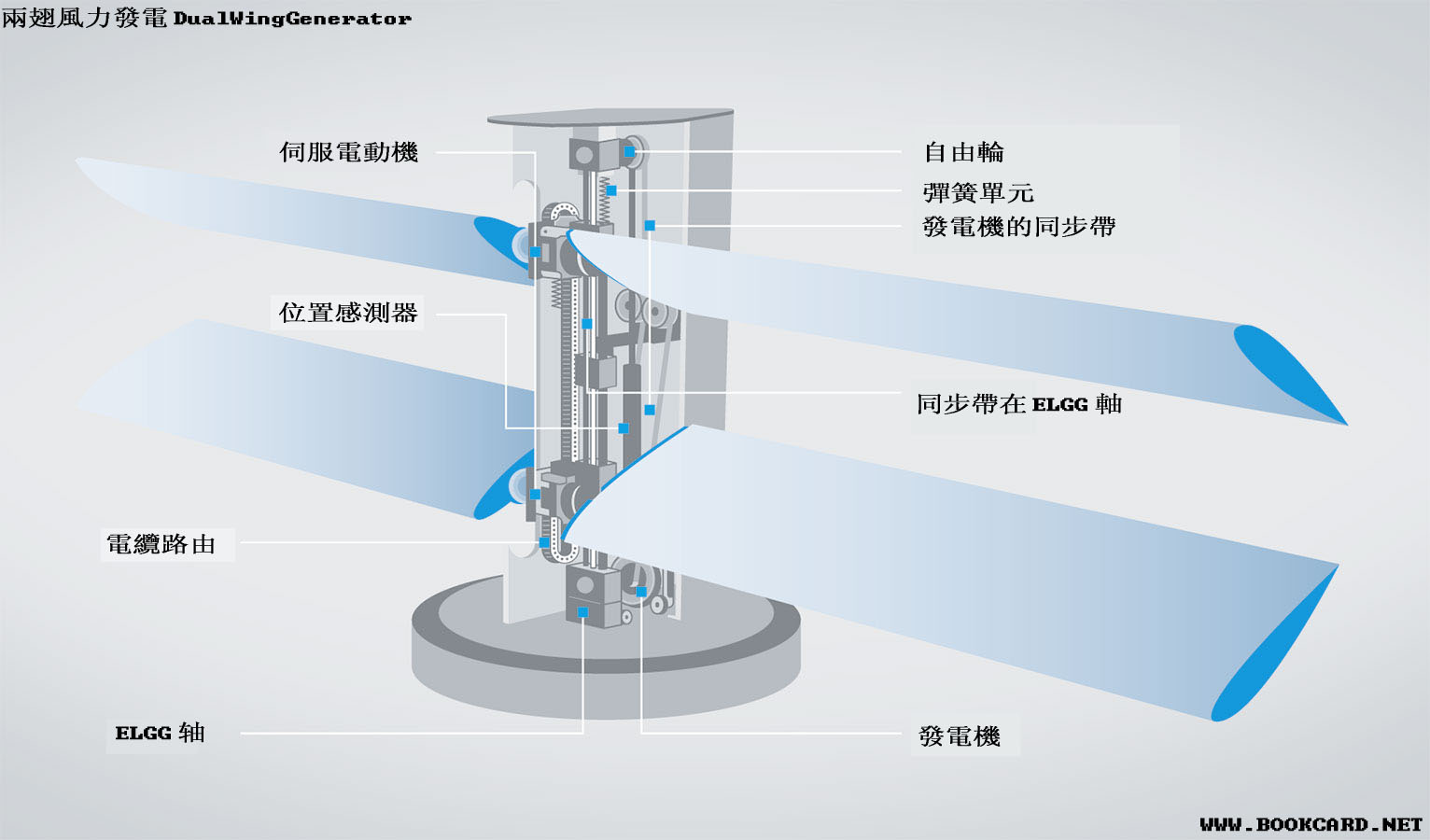
兩翅風力發電DualWingGenerator
兩翅風力發電DualWingGenerator,該系統採用兩對反向運動的翅膀取代轉子葉片進行能量獲取。由於其智慧控制技術,能自我優化系統以適應不同的風速,其發電效率絕不遜於常規小型風力發電設備,在低風速更顯出驚人的優勢. 它能在風力低至9英里每小時繼續工作風力,而渦輪風力發電早罷工了.當飛鳥飛過發電機時能輕易的躲過去.
翅膀自然振翅的反向原理,該系統的原理來自鳥類飛行所產生的動力模型,在空中通過拍打翅膀,可以從氣流中獲取動能.翅膀的直線往復運動被轉換為旋轉運動.借助發電機將產生的能量轉化為電能.
反向運動的翅膀對發電最有利,四個翼設置在中心柱的兩側.兩個頂翼和兩個底翼各自位於其上相同的電機驅動的旋轉軸,它們安裝在滑塊上.當風吹来時,兩個滑塊在垂直方向上同步移動在相反的方向上引導.當頂翼向上移動時,底翼向下移動.這對翅膀在一側形成功能單元,其流體力學性能使得能夠以最佳方式產生能源。在頂端伺服電機轉動翅膀,他們自動移動回向對方.翅膀的主動旋轉使得空氣以最佳角度流到四個翼上.這使自適應系統實現了最佳的能源產量並證明具有很高的科學水準.當開發人員開發仿生海鷗時,工程師研究鳥類如何旋轉翅膀,從而最大限度地使風力發揮作用.
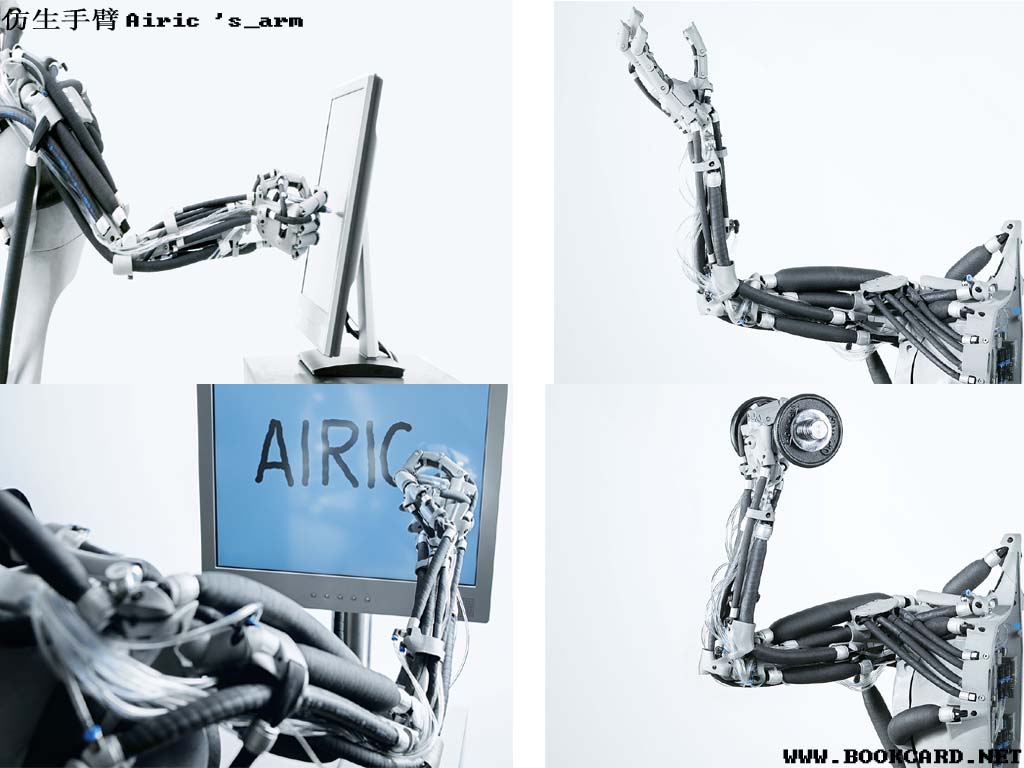

仿生手臂Airic‘s_arm用它的手和肩關節,人體的手臂有總共64條肌肉和28塊骨骼以及眾多神經感受人體溫度,位置,觸覺和疼痛.因為特殊關節的結構,人體發展出驚人的力量和幾乎每一個方向的移動.我們可以用我們的手以特別方式抓住物體,並使用我們的手臂和肩膀以高精度抓住它們.我們快速反應; 投擲棒球的速度達到最高150公里/小時.我們可以牢牢抓住物體, 手臂和肩膀舉起重重量達250公斤負重.
在未來機器人很快就能掌握這些技術,令我們離開越來越多的危險,仿生手臂是一個具有人工骨骼和肌肉的機器人手臂,總共30個肌肉移動骨骼結構,像我們自己的手臂,包括尺骨、橈骨、掌骨和指骨,肩關節和肩骨骨關節.在這些技術在當今世界中還未出現, 仿生手臂的骨絡在電腦上設計的並使用在3D列印中最先進的鐳射燒結工藝。肌肉,氣動肌腱(Fluidic muscle). 已經廣泛應用于工業應用領域.主要人工橡膠軟管構成,內部嵌有尼龍纖維當氣動肌肉充滿壓縮空氣,其直徑增加並且同時縮短。形成一種流暢的彈性運動. 這種人工肌肉有巨大的啟動力量,它的動態行為類似於人類肌肉的行為。其最大的優勢是,當它收縮時不需要進一步供應能量。當它一旦提起重物,仿生手臂可以無限期具起.
仿生海鷗SmartBird

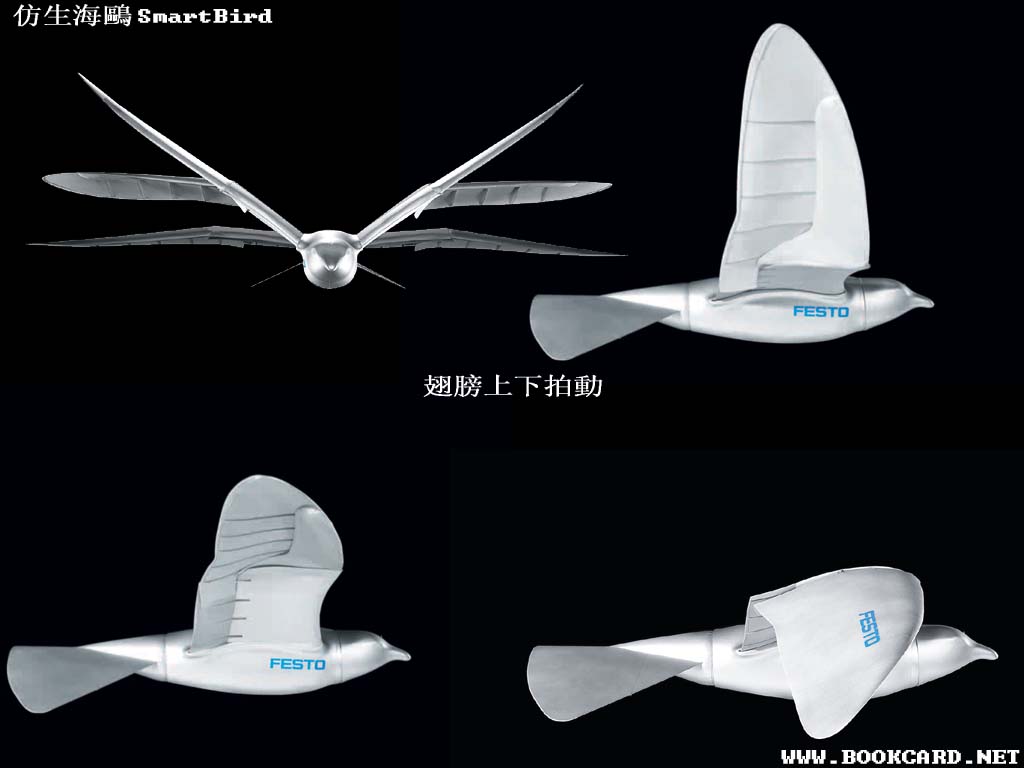

仿生海鷗SmartBird 具有超輕便和強大的飛行模型氣動特性和極強敏捷性,可以自主飛離地面,無需額外的驅動機制,它的翅膀不僅可來回拍打,而且具有一定的扭曲角度.由一個主動關節扭轉驅動器, 在複雜的控制系統的結合下得前所未有飛行效率,使用超輕便材料構造,符合空氣動力學的設計.
仿生海鷗的不尋常的特點是它的翅膀主動扭轉無需使用額外的升降裝置, 仿生海鷗實現高效的整體結構在資源和能源消耗方面,以最小的總重量,結合推進功能集成並在兩翼和飛行控制單元的軀幹和尾部,進一步的要求是良好的空氣動力學,推進和提升的高功率密度,和最大敏捷性飛行工藝.
主動關節扭傳動, 翅膀飛行包括兩個主要的運作.首先, 翅膀上下運動,從而使杠杆機構從軀幹到翼梢的偏轉程度增加,在這過程中, 在向上飛行期間其前緣翅膀扭曲,使翅膀為正角度,如果翅膀旋轉是由於翅膀的彈性導致扭轉,驅動器將主動控制機翼的扭轉.
鳥類的升力和推力有翅膀產生,仿生海鷗的翅膀各有兩臂翼梁軸支承在軀幹上,就好像使用的梯形關節提起兩臂翼翼梁.梯形關節的振幅比為1:3。臂翼產生升力,臂翼的梯形關節產生推力。內翼和外翼的翼梁都是抗扭的, 主動扭轉是通過在外翼端部處的伺服電機實現,其通過翼外側肋骨將翼扭轉到翼梁.
線性運動學用於獲的最優推力,當仿生海鷗抬起翅膀時,伺服電機主動扭轉,扭轉兩臂翅膀的尖端到正向角度,然後將其改變為負度,角度為翅膀節拍週期的分數,扭轉角度在它們之間保持恒定,由於這一系列的運動使氣流沿著翼型可以最優地產生推力.
軀幹在安全的外殼裏,電池,發動機和變速箱,曲軸機構和控制和調節電子器件被容納在仿生海鷗的軀幹中. 通過兩級螺旋傳動,外部轉子電機使翅膀隨著減速而上下振動比例為1:45. 該電機配有三個霍爾感測器,可精確記錄翅膀的位置, 震盪和彎曲力從變速器經由翅膀傳遞到彈性連杆. 曲柄機構沒有死點以最小的峰值負載均勻運行,從而確保平穩飛行.
頭部和軀幹部分在任何空間中的相對運動方向通過兩個電機同步聯動. 軀幹會根據空氣動力學同時彎曲和比重位移; 這使仿生海鷗高度敏捷和靈活.
尾部輔助升力和控制,仿生海鷗的尾巴也產生升力;它既起到調節升力和偏航的作用。 當鳥沿直線上飛行時,其兩個尾翼的V位起到穩定的翅膀作用, 當轉向左或右時尾部傾斜:當它繞者縱向軸旋轉時產生繞垂直軸的偏航力矩.
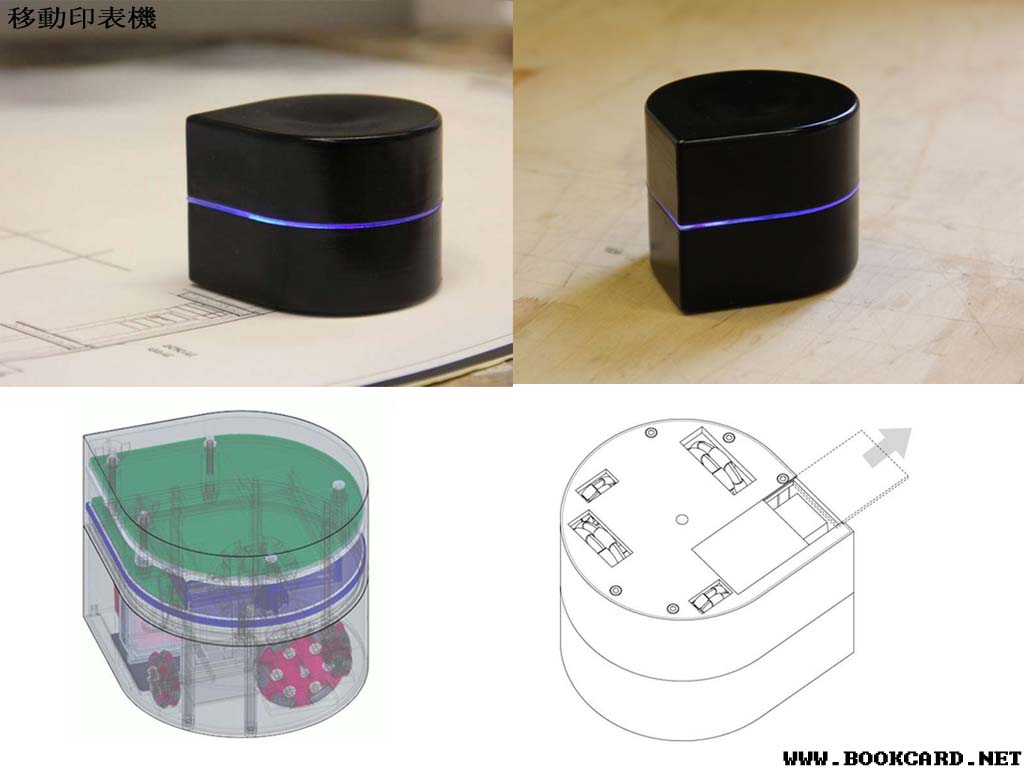
移動打印機The Mini Mobile Robotic Printer
以色列公司ZUtA Labs開發真正能移動打印機Mini Mobile Robotic Printer,移動打印機刪除了所有不必要的部件,只保留了噴墨打印頭,噴墨打印頭裝在3個滾輪上,可以以任意方向移動來回進行打印.
因為只有黑色墨水匣,所以僅支持灰度列印,可持續列印1小時, 無線連接,支援 Android, IOS, Linux, OSX, Windows 作業系統.
我想到一個奇特玩法,不限於紙張,可以採用其他列印介質,如木板.瓷片.相信可以得到意想不到效果.
印表機售價180美元起,官網http://www.zutalabs.com/
軟體仿生魚-麻省理工學院 (MIT)
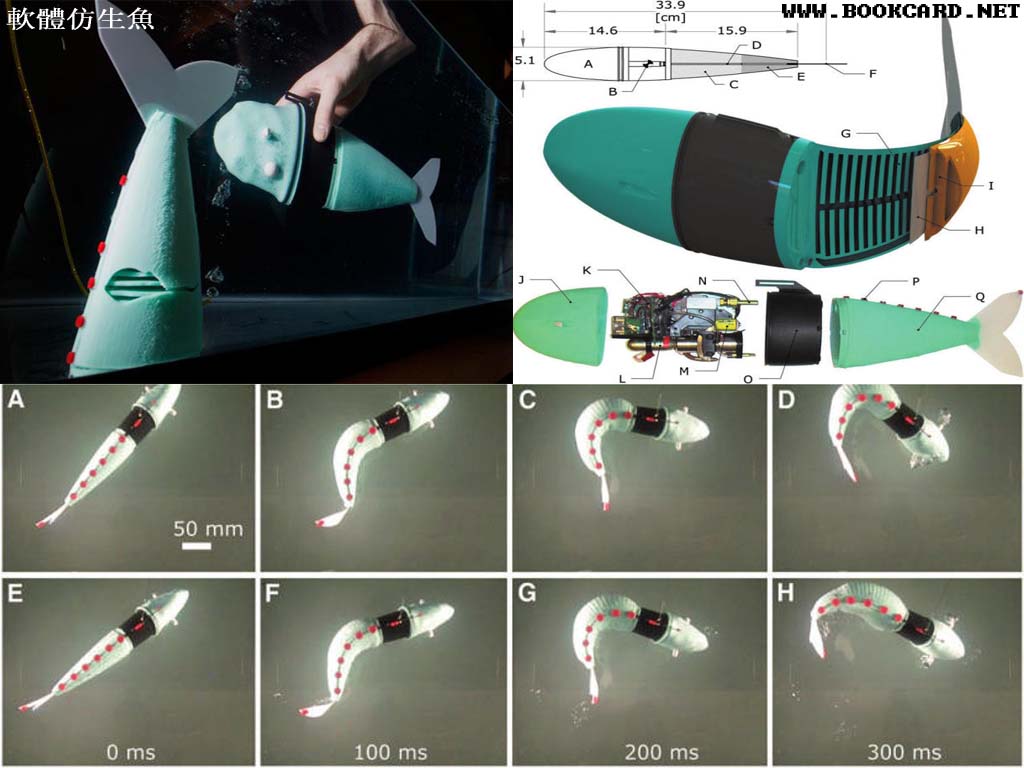
麻省理工學院 (MIT)正在開發軟體仿生魚,它三個重要的部分組成.
首先, 軟體仿生魚的身體是由柔軟的矽膠組成,它們可以彎曲和扭轉.矽膠包裹著整個身體形成安全網.
第二,因為軟體仿生魚身體構造可以彎曲和扭轉,它的動作非常豐富敏捷機動迅速,而且它動作非常符合魚運動形態.
第三機軟體仿生魚是一體自包含的,換句話說,我們可以包含電源,感測器,電腦和驅動器,並為這些,這些全部安裝在魚體內.
目前, 軟體仿生魚由兩個部分組成, 第一部分是頭部較小,放置所有硬體和剛性部件.第二部分較大的柔軟身體,能做出連續自然的動作.它有著與魚非常相似的結構:將大腦保持在魚的頭部,具有剛性,但在魚的尾部,其中運動角度相當柔軟,軟體仿生魚它尾部存儲二氧化碳然後釋放.二氧化碳通過管道和閥門進入體內,這個過程相當於吹氣球.在嘴部釋放壓力,氣體將魚身致動,它動力基本上就是充氣和放氣過程.特別之在於這種軟體仿生魚有它的大腦.可以從我的手機對它發出指令.通過無線電穿過水傳送到軟體仿生魚的大腦,然後大腦向身體發送如可前進的指令.
當軟體仿生魚遇到捕獵者,會自動採用”C形轉灣”逃避,它速度非常快,逃避動作在 100毫秒內完成,而且能得到很高魚身弧度.這顯示軟體機器人比硬體機器人更強大. 而在未来軟體仿生魚将会用水泵原理取代二氧化碳填充,增加游泳時間.
仿生蜻蜓BionicOpter

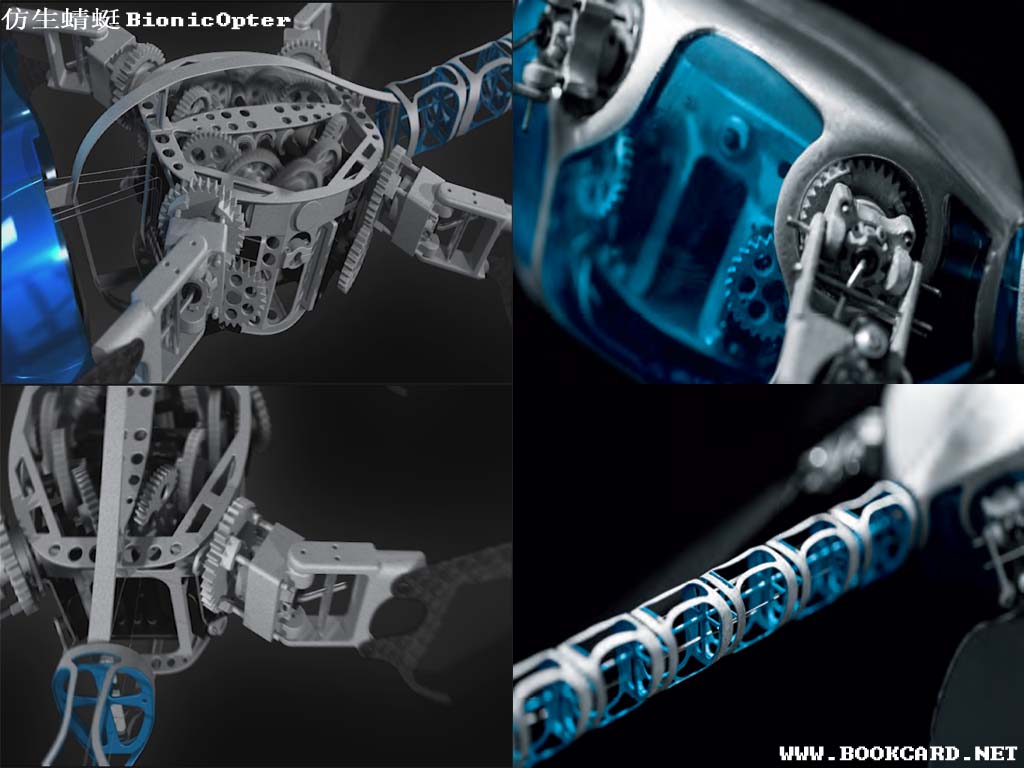
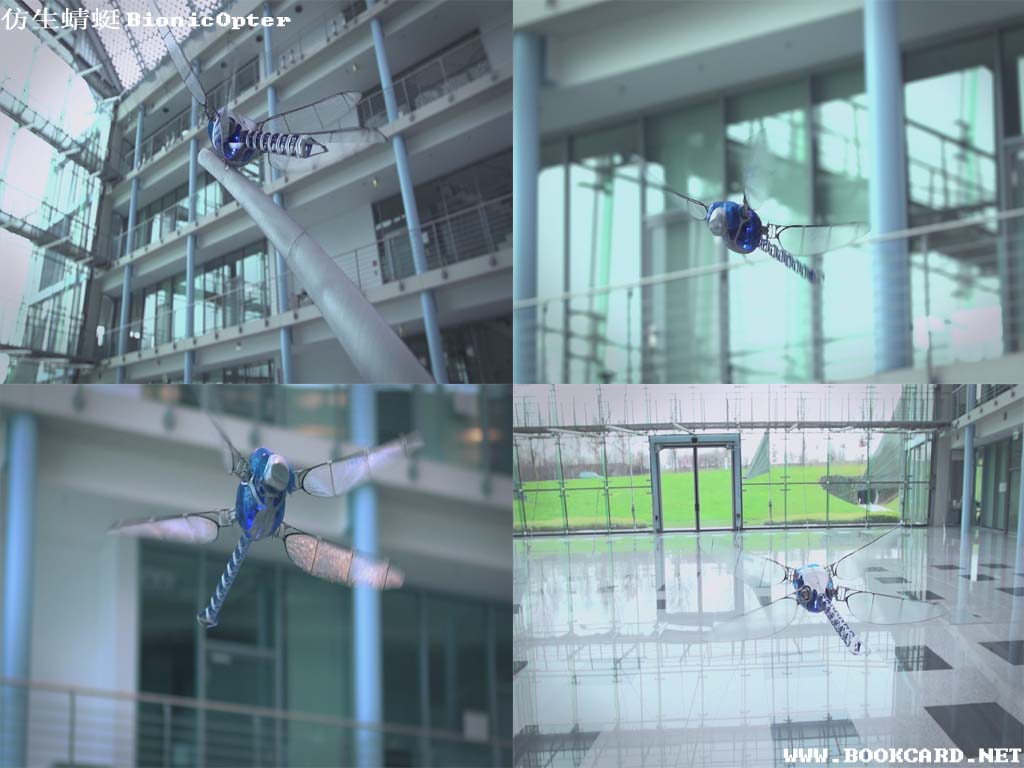
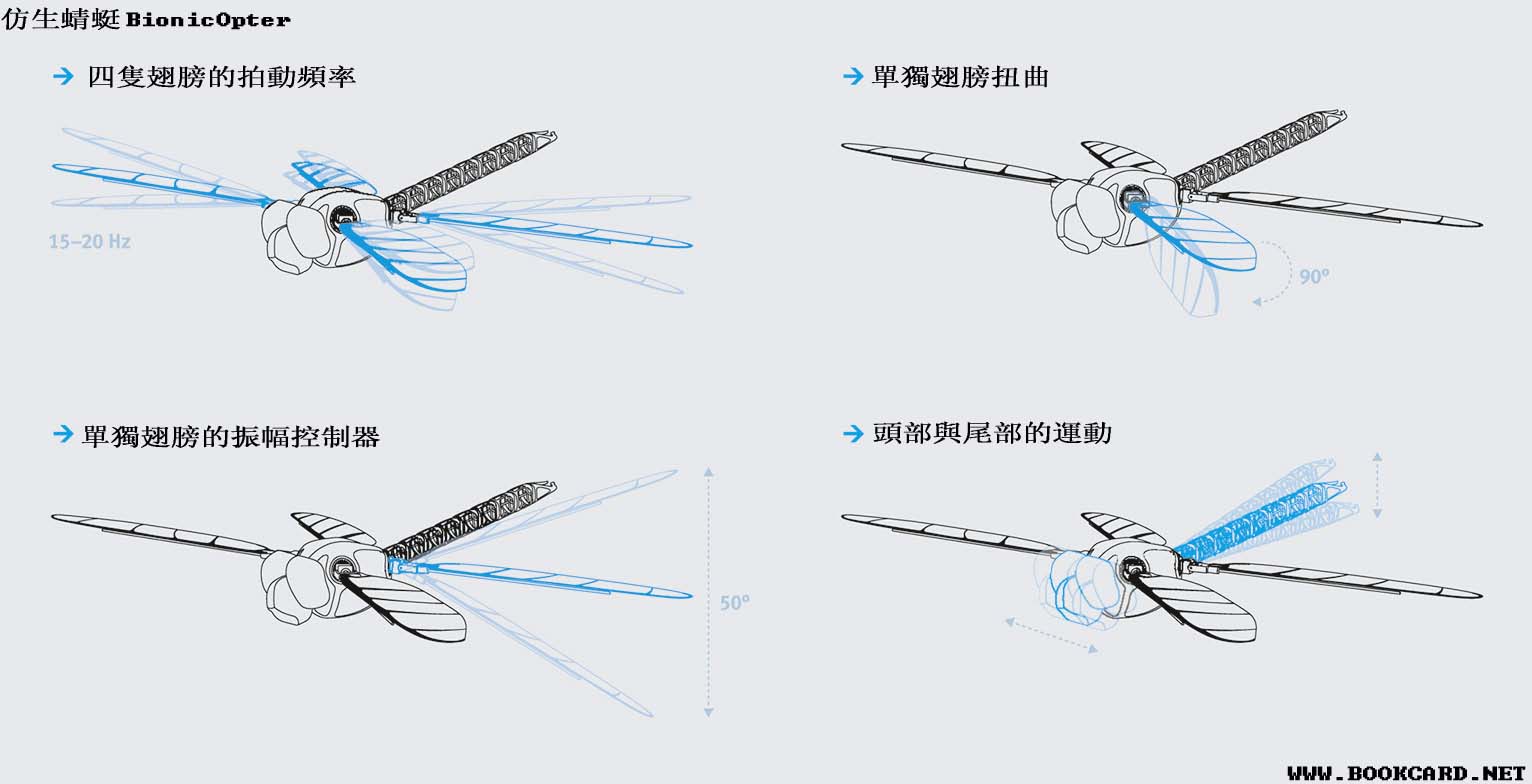
仿生蜻蜓BionicOpter,其翼展27英寸(63cm)身長19英寸(44cm)重量為 175 克(0.4 磅左右),翅膀每秒震動達15至20次.由智慧手機進行飛行控制.它的四隻翅膀是由碳纖製造,每個翅膀各自裝有振幅控制器為獨立控制振翅頻率和各翅膀的扭轉,翅膀的扭轉決定著推力方向, 推力的大小由振幅控制器調節, 可以隨心所欲向各個方向飛行,空中定點懸浮和滑翔飛行而且無需振動翅膀.得益於起超輕的身體構造, 突然倒向飛行,側向移動, 90度的旋轉飛行,起飛時無需人手擲出.它就像直升機飛機和滑翔機相結合.
實現仿生蜻蜓飛行特性的前提條件是超輕的身體構造和緊湊空間中的功能整合, ARM 處理器, 九個伺服電動機,電池和無線接收器.感測器,執行元件和傳動機構其安裝空間緊湊並相互配合.
美貌密碼


此文只是從科學的角度進行探討.上圖的女生在經過整容後,相貌的到很大的改觀,整容後愉悅的感覺,整容前厭惡的感覺.從啊姨變成BB女.在愛情和事業肯定可以更進取..
上圖的女生多大做下頜角超長弧線截骨,顴骨內推,下巴前移,鼻翼收窄.都以骨頭有關手術,幾乎可以肯定相貌美醜肯定與頭骨直接有關係.
下頜角越肥大則咬力強勁,能夠咬開併吞下別人不能吞食的食物,但華夏飲食文化五千年煎炒烹炸悶溜熬燉二十八法,早已非原始人刀火飲食能相比,強勁咬力以無此需求,並成為負累.
福相:骨小而肉多,惡相:骨多而肉小,上面的圖片很好的講明此相學原理.
品性會改變相貌.品性肯定不可以改變相貌,只能通過外科手術.
相貌會改變品性,我任為這有一定的關係,但絕非是對應的影射關係.
”心慈則貌美,心惡故貌醜”,貌美的品性則純品, 貌醜的品性則陰險, 相貌與人品是否有影射對應的關係.這個肯定與我們社會上所見到的肯定是不一致的.
“貌醜而賢德”貌醜自小就會給人異樣的眼光. 自小在人與人的交往中,在一次又一次傷害下,一次又一次的比較下. 而有保持賢德實在不易.這樣女生當然好女生.但可能占比不高.
“貌美而賢德”貌美追求者肯定仲多.你試想一下每天幾個不同男生圍著你轉,你做事肯定信心滿滿.但事業和愛情的成功是否會帶來賢德呢?這個肯定是不可能的.
無論心慈或心惡,它都要通過美貌來展現出來.因為美貌可以大量吸引觀眾.心慈或心惡只是你個人品性.
農夫機械人艾達伯特IdaBot

美國愛達荷州西南部的研究人員研發一種帶有射頻識別和攝像頭的機器人,在每棵樹安裝射頻識別牌, 農夫機械人可以接收到識別牌上發出的信號, 讓機器人知道的樹位置.對不同的樹作出不同的處理, 全自動工作不需要人工干預,用農藥量很低. 而且噴灑精確. 在配備多光譜攝像頭監控無人機的幫助下.對每棵樹的農藥使用進行精准控制.
機器裝有四個攝像頭,包括彩色、近紅外和立體攝像頭可評估每棵樹的果實數量.
機器人頂部放置水果箱, 全自動採摘水果無需人手操作,水果箱盛滿以後,機器人把水果放到指定地點,再返回採摘點繼續採摘.
農夫機械人最終目的是幫助農夫管理莊稼並降低勞動成本,如噴灑農藥,監控作物,收割作物,可以大副度降低勞動成本,降低勞動強度,大幅度提高生產力,最終也降低農作物價格並降低物價,惠及消費者.
域名之戰略儲備

在搜尋引擎獨大的今天,絕大部分的網站都成搜尋引擎的內頁,但如果你想擺脫搜尋引擎,讓用戶記住你的網站,你就需要一個簡短易記域名.長度不要超過8字母,當然越短越好,越短越貴,兩個字母過百萬美金.以.COM優先,.NET次之.
所以域名必須作戰略儲備,有必要就的話,就要提早買下,要知道互聯網和電腦的發源地均是美國.
美國憲法第五修正案規定:
No person shall be deprived of life, liberty, or property, without due process of law; nor shall private property be taken for public use, without just compensation.
(中譯:“任何人的生命、自由或財產非經正當法律程式不得被剝奪;私有財產只有在為公共利益且經合理補償方可徵用。”)
所以域名要保存在美國,它受到美國憲法保護.你可以將他傳給你子孫後代.下面以www.godaddy.com為例作介紹,你要查找你喜款女生(域名)還待字閨中,大都已出嫁,好的女生(域名)以買小見小.只能耐心的搜索心宜女生(域名).
以購買.COM域名為例,第一年5.86人仔,之後每年101人仔,外加ICANN管理費每年1.14人仔.一次過給5年的費用.每個409.86人仔. 我買了兩個功能變數名稱,外加費稅和費用11.40人仔,外加促銷碼一共617.40人仔.
付費可以選擇支付寶Alipay,銀聯UnionPay,信用卡,強列建議使用銀聯UnionPay,方便快捷.輸入卡後,手機,驗證碼,完成付款購買成功./馬上就可以在域名列表中查看.
仿生魔鬼魚Aqua ray
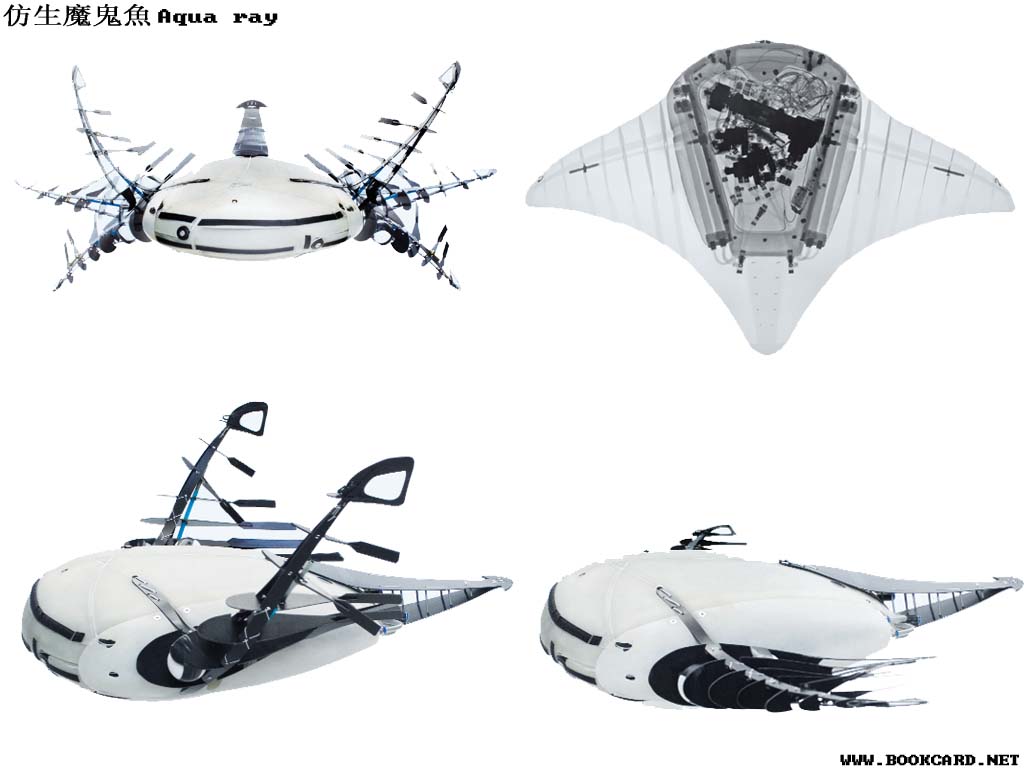


魔鬼魚海洋中的肉食生物,其能夠分泌致命的毒液.
Aqua ray在對魔鬼魚的仿生設計中, 能實現靜態潛艇滑行和動態魚鰭拍打兩種運動方式, 波浪運動完美結合最大推進與最小能耗, 氣動肌腱由內部嵌有尼龍纖維的人工橡膠軟管構成,當氣動肌腱充滿空氣或水時,它的直徑增加並長度縮短,形成流暢的彈性運動.
仿生魔鬼魚的中央驅動和控制單元幾乎完美的模仿魔鬼魚鰭部的自然模型運動模式,這完全是由於對力學的鰭部’s-bony杆構成尾翼的支撐結構,即則翼可以拱起,以保證力量的分配的一個高效的驅動機制.
仿生魔鬼魚中央水壓驅動泵產生就像心臟一樣推進能源輸送的壓力的通過專門開發的閥門三條氣動肌腱, 氣動肌腱收縮力是通過氣動肌腱的收縮力由高強度的繩經線軸和護套等傳給翅膀和尾巴,經過這一戲列轉換,將55mm的伸縮量轉換成了翅膀的550mm的振幅.
通過使用新的彈性材料對所有運動部件和三維變形的皮膚,並通過匹配的彈性內側翼和尾結構的自適應特性的水動力,它有可能重現自然海洋模式的運動學分析.水是必不可少的aqua_ray的功能,因為完全真實的運動只能結合本培養基及其特殊特性.由肌腱所影響的力方向的變化使將背側和胸部的肌肉移到一側是可能的,從而為儲能和轉化提供了更多的空間部件隨著控制和感覺單位.要求關於技術和性能效率,例如有效載荷,因此可以與生物優勢和解水上運動.
由於其外形和推進方式,仿生魔鬼魚很適合應用在海洋研究中的不同領域而不受自然環境的幹擾.仿生魔鬼魚的封閉式輪廓並而沒螺旋槳的旋轉部件,很適用於管道、電纜或海底本身使用,它的扁平的身體和很小正面面積降低流動阻力.
仿生魚Airacuda
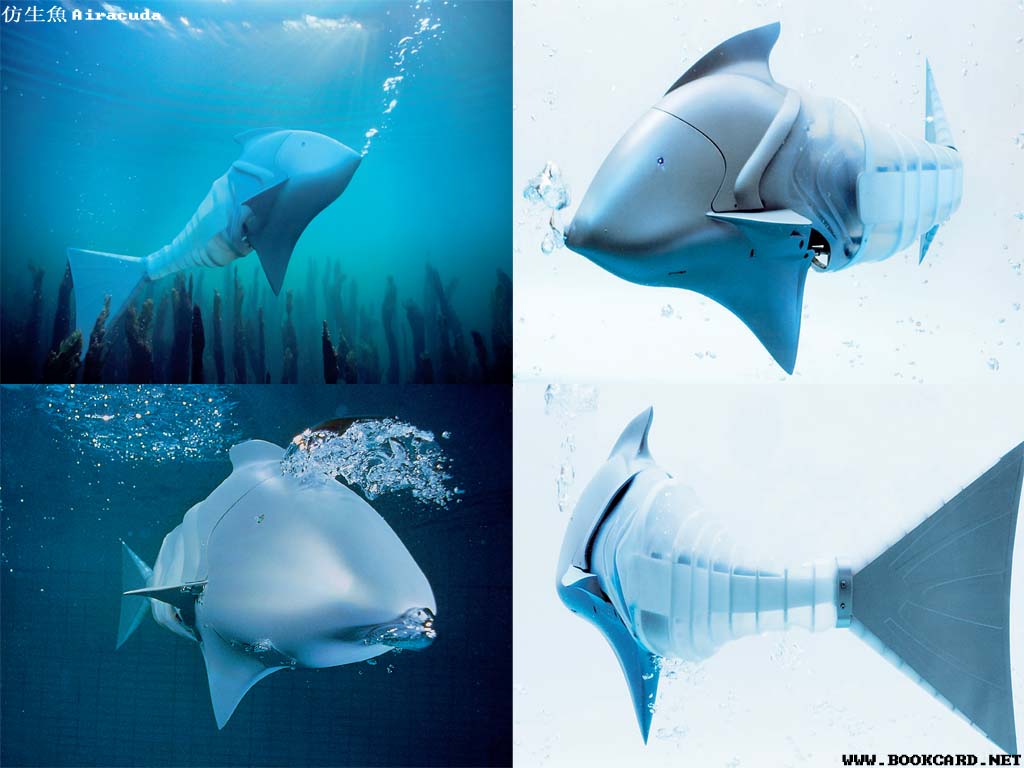
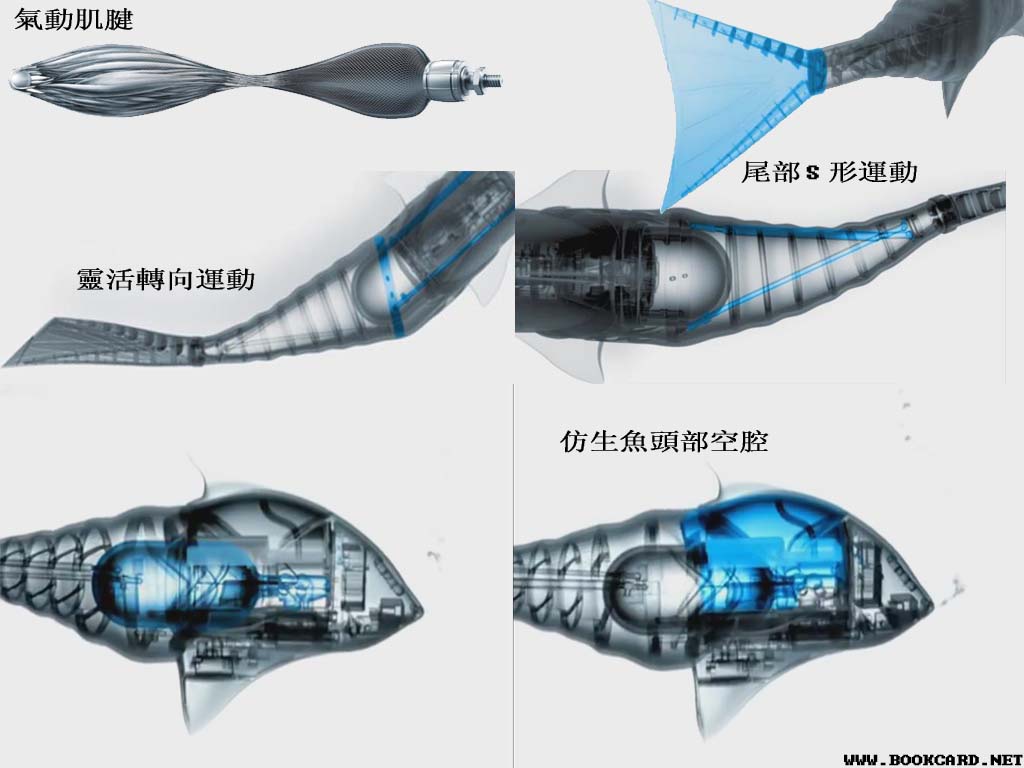
仿生魚Airacuda 它的動力來源於4條氣動肌腱(Fluidic muscle).兩根氣動肌腱控制尾部的S形運動,另外兩根氣動肌腱用於靈活轉向運動.長度1米,寬度28CM,高度45釐米,重4KG..
氣動肌腱(Fluidic muscle).主要人工橡膠軟管構成,內部嵌有尼龍纖維,當氣動肌腱內充滿空氣的時候,其直徑增加,長度縮短,形成一種流暢的彈性運動.氣動肌腱堅固耐用,其作用力比相同尺寸的氣缸大10倍,能在沙塵沙石的極端條件下工作.
它的設計外形和動力遵循魚的生物模型,電子和氣動部件隱藏在它防水的頭部中,魚鰭由交互牽引和壓力邊緣構成,它們通過骨架連接, 當在側方施壓時,這一幾何結構自主朝施壓方向彎曲.
仿生魚頭部內藏有空腔,就好像潛水艇一樣,下潛吸入海水,上浮排出海水吸入空氣,通過壓力感測器回饋的信號來控制氣閥的開閉,以控制空腔內是海水和空氣比例.以控制下潛深度.
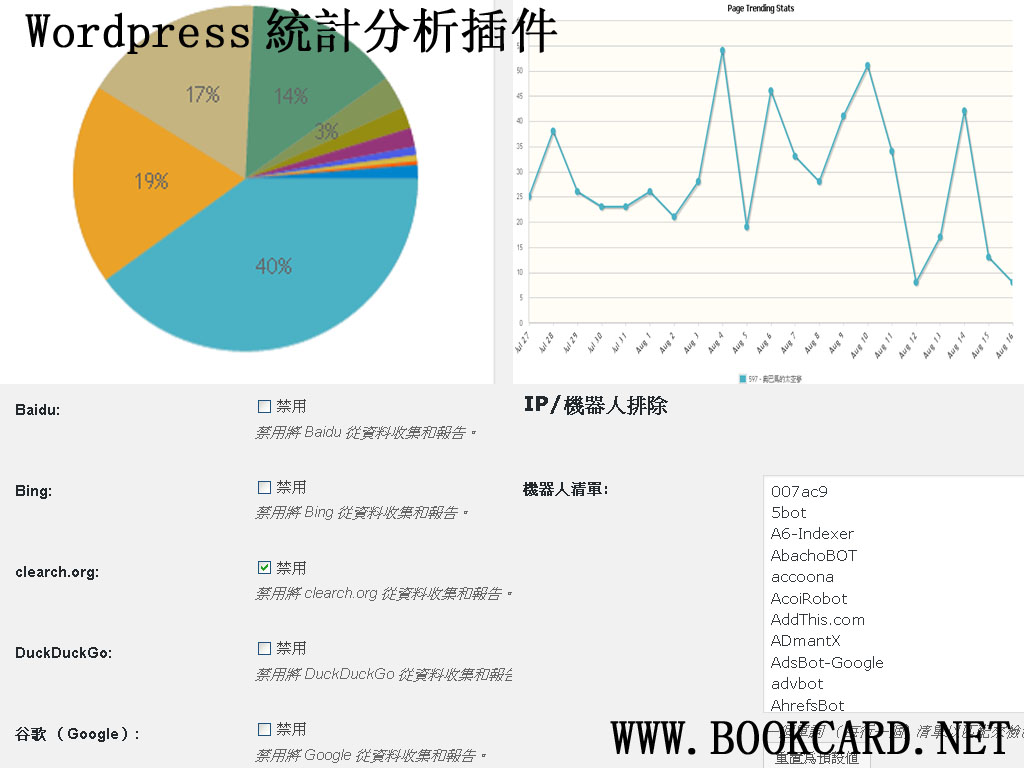
WordPress統計分析插件(wp-statistics)
WP Statistics統計分析插件,最重要是速度快,無需WordPress帳號.而且所有代碼保存在伺服器,無需調用外部連接.但它有五好的地方,並不是基於Javascript技術,大量留言和採集機器人被納如流量,這些機器人會自動改變user-agent冒充成其它瀏覽器.讓你以為有人瀏覽.不过的它的工能很丰富,基本上可以代替Google Analytics
而其的其中一個版本會顯示以下錯誤.
Parse error: syntax error, unexpected T_USE, expecting T_FUNCTION in /home/andreliu/public_html/wp-content/plugins/wp-statistics/vendor/s1lentium/iptools/src/IP.php on line 10
只能下載後重新安裝.一切回復正常.安裝包
仿生隱形眼鏡 (晶體)

Ocumetics Bionic Lens仿生晶體, 配戴者只要戴上晶體, 以食鹽水沖洗後10秒, 晶體就會在眼球上擴張, 整個配戴過程只要8分鐘, 佩戴者眼球不會感到疼痛和刺激,配戴者需年滿25歲眼睛結構成熟者, 仿生晶體可以讓人們的視力超過1.0,甚至達到3.0. 近視、遠視、老花、青光眼等問題都可回復正常視力之餘,更可得到比標準視力好2倍的效果!仿生晶體使用惰性物質(inert substance)製作,並不改變眼睛原本的生理機制.
Garth Webb博士本是自加拿大不列顛·哥倫比亞省的一名驗光師,因自小配戴眼鏡,所以耗費8年時間並投入3百萬美金進行研發.
500米口徑球面射電望遠鏡(FAST)

2016年9月25日位於貴州黔南州平塘縣大窩氹的500米口徑球面射電望遠鏡(Five-hundred-meter Aperture Spherical radio Telescope)(FAST)將投入使用. 它於五年前動工, 口徑500米,接收面積25萬平方米(相當於30個足球場), 工程花費約6.67億人仔, 它將微弱的天體電波高倍放大後進行檢波並記錄下來,從而探測宇宙中的遙遠信號和物質. 如果銀河系中存在高度文明的外星物種,他們發送資訊將會被發現.

美國阿雷西博(Arecibo)射電望遠鏡口徑是300米
德國埃菲爾斯伯格(Effelsberg)射電望遠鏡口徑100米
中國FAST射電望遠鏡口徑是500米
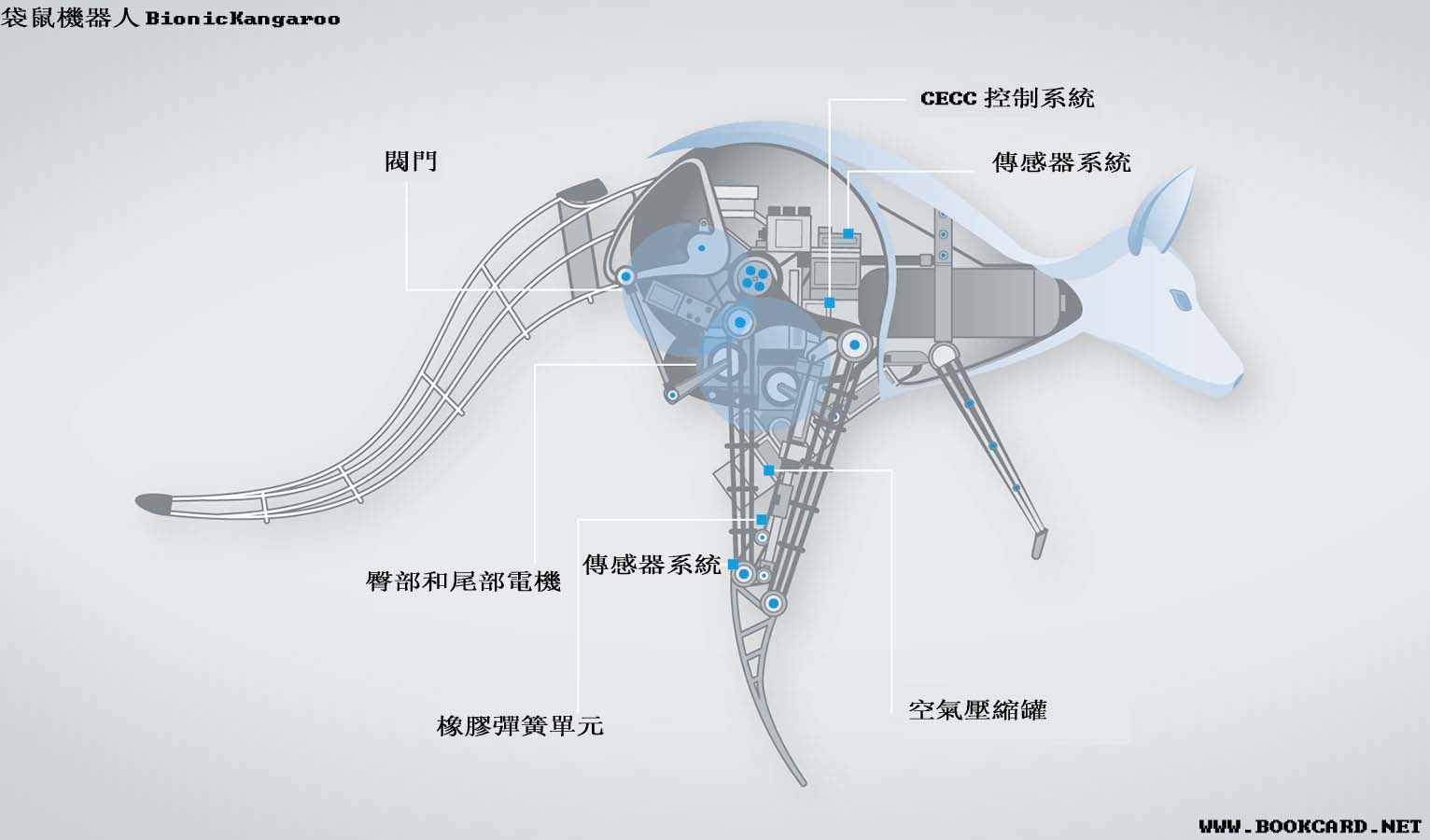
袋鼠機器人BionicKangaroo
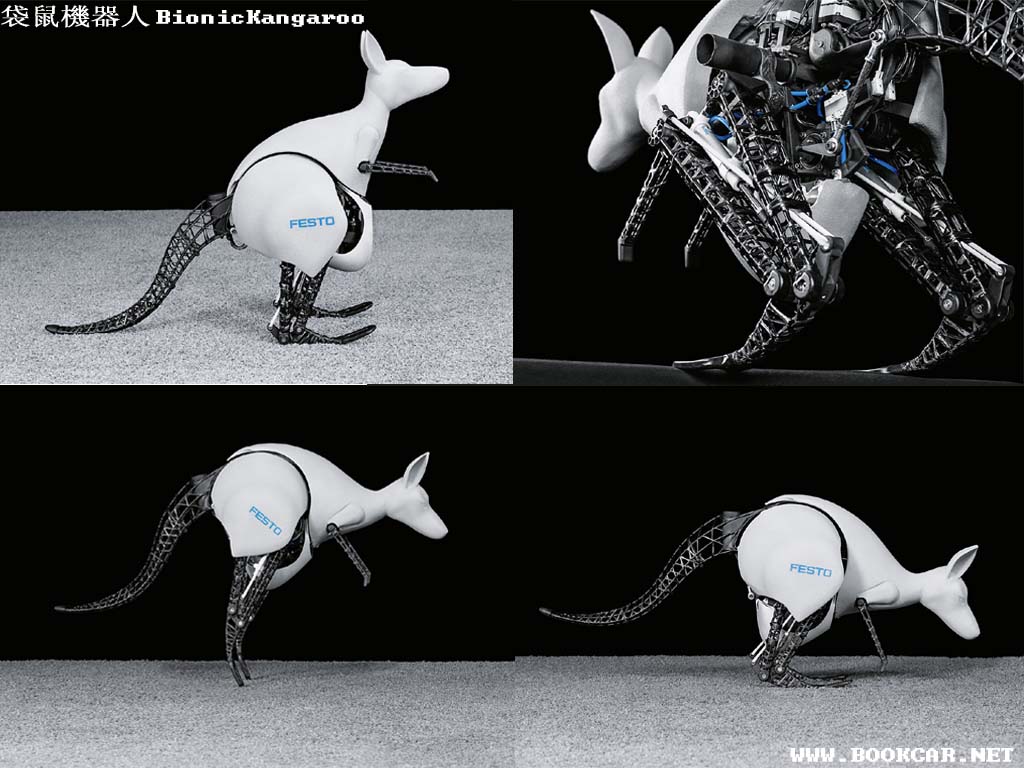
德國Festo公司花費兩年時間成功開發出袋鼠機器人(BionicKangaroo), 在技術上再現袋鼠獨特的跳躍運動. 並讓袋鼠機器人穩定地跳躍及著地,操作者透過手勢控制.如站立、轉向和跳躍等等. 袋鼠機器人高1米,重量僅有 7公斤.它能跳躍0.8米的水準距離和0.4米的垂直高度.不過與12米的澳洲袋相比差距還非常大.
袋鼠機器人採用了氣體動力學和電驅動技術.它的氣動裝置負責為跳躍提供足夠的動力,電動馬達負責維持自身的平衡和精確的控制姿勢,袋鼠機器人會自我根據自身的狀態調整尾巴和臀部的運動從而保持高平行.
袋鼠機器人增加了能量回收系統,能夠從上一次的跳躍中儲存能量為下一次跳躍做準備,袋鼠機器人的跟腱(髖關節)結構是由高密讀橡膠構成的彈性材料,跟腱結構為袋鼠的跳躍提供動力和緩衝,在準備跳躍時跟腱被拉緊加大彈性勢能,同時袋鼠向前傾斜和控制尾巴調節自身重心,當跟腱放開時袋鼠一躍而起.跟腱電機驅動腿部前擺,並擺動尾部以保持平衡,袋鼠機器人落地時,跟腱再次被拉緊儲能,為次一跳躍做準備.
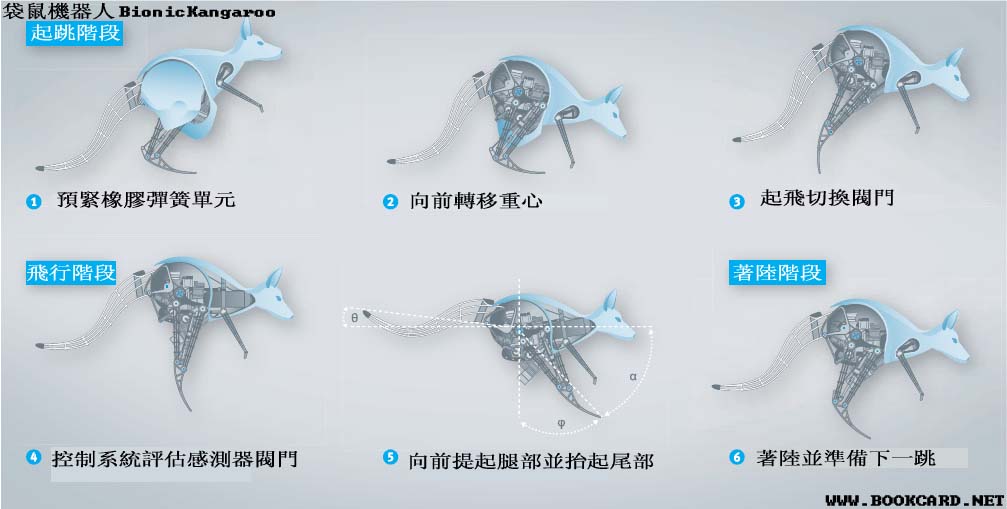
它分为三个階段,起跳階段,飛行階段,著陸階段.
起跳階段:膠彈跟腱預緊并向前轉移重心,起飛切換閥門.
飛行階段:控制系統評估感測器閥門,向前提起腿部並抬起尾部.
著陸階段:著陸跟腱再次被拉緊儲能並準備下一跳.
uArm小型四軸機械手臂

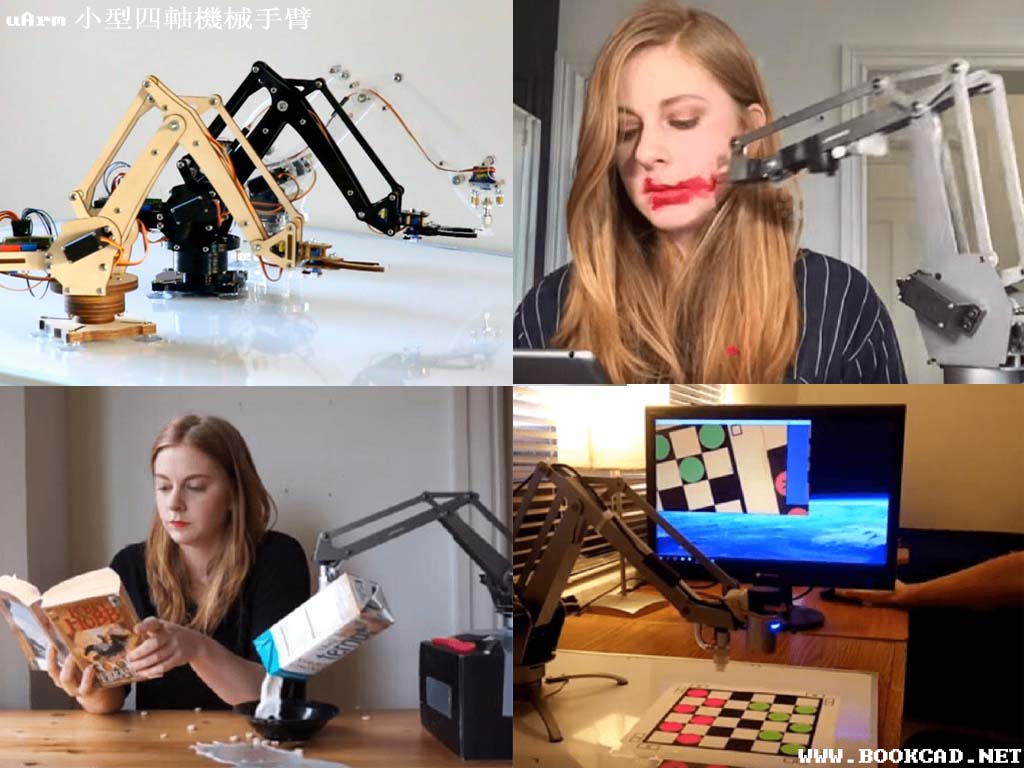
uArm是世界第一台桌面級開源四軸機械手臂,數控加工的鋁合金讓機械手臂既堅固又輕盈.所有的源代碼都可通過官網http://www.ufactory.cc/公開可下載.目前,這款機械手臂有木制和鋁合金可選.它由使用帶有4個自由度的Arduino控制。底部三個舵機用來控制手臂的主要動作,而頂部的迷你舵機則用來移動和旋轉物體。機器人手臂的端部執行器則總是保持與地面平行.該手臂主要相容Android和iOS設備.通過藍牙連接移動設備來控制它.而且它支持Arduino庫.用戶可以為它自行編寫適用自己的uArm.通過調用不同的功能,用戶可以輕鬆移動uArm到目的地.他們展示出幾個特別的按例塗口紅:BB變啊姨.遞早餐:什麼都吃不到. 下棋: 機械臂安裝有相機,讀去棋盤並移動棋子,與人對戰. 看到他們展示的作品相信你都會有購買的衝動,其實本人覺得最實用的是當你雙手工作時, 機械臂在旁邊協助.
球形變形金鋼MorpHex MKIII
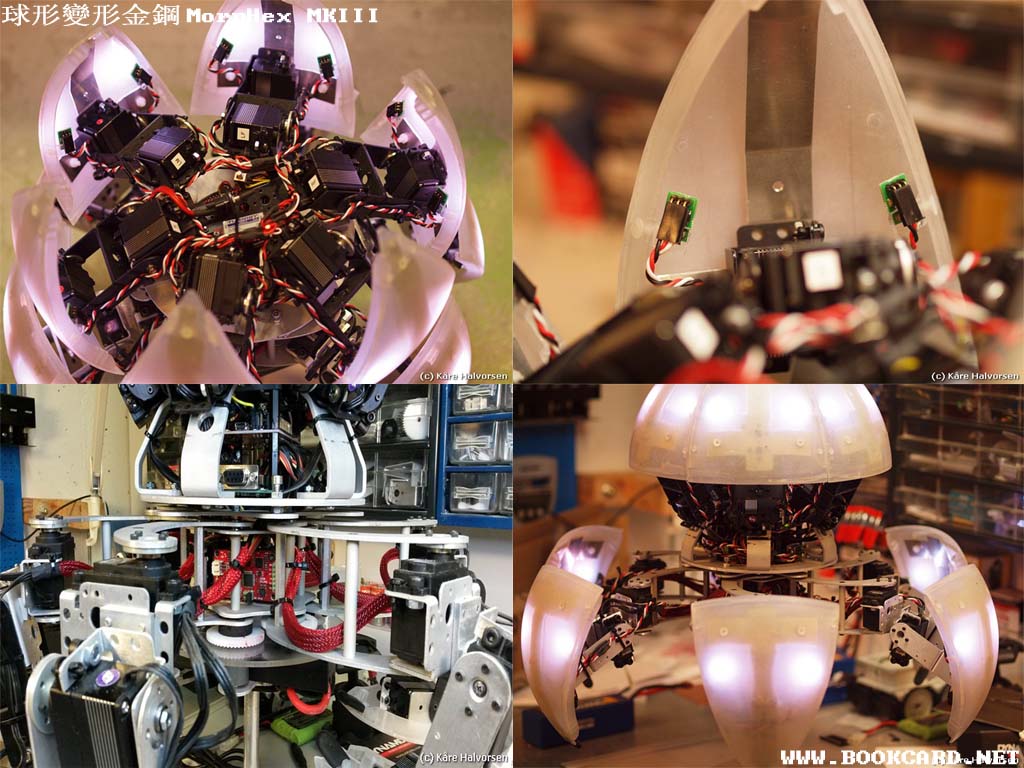

挪威工程師 Kåre Halvorsen (Zenta)推出MorpHex MK三代是第二代的升級版本.它最大的特點是裝有24盞RGB色LED燈. 每只腳2盞燈.主要的更改,自由度更好慣性測量單元. 慣性測量單元進行精確的控制有很大的改進. 它能夠爬過障礙物. 能爬行高達45度傾斜底.更準確的前後滾動. 任意的滾動中有更好的『自治』模式. 展開6只腳時可達球形時的兩倍直徑.LED可指向移動方向.
球形變形金鋼


機器人MorpHex MKII其實它有十二隻腳,不過它通常只用六隻腳走路.獨立控制每一隻腳移動.它在一球裏面裝有二顆伺服馬達,更容易控制向前.後退和翻越障礙物.另它可用十二隻腳來滾動(兩個半圓),並控制方向,然有再次站立起來.
此機器人由挪威工程師 Kåre Halvorsen (Zenta) 受自然界的昆蟲啟發製作.
金屬肌肉仿生手
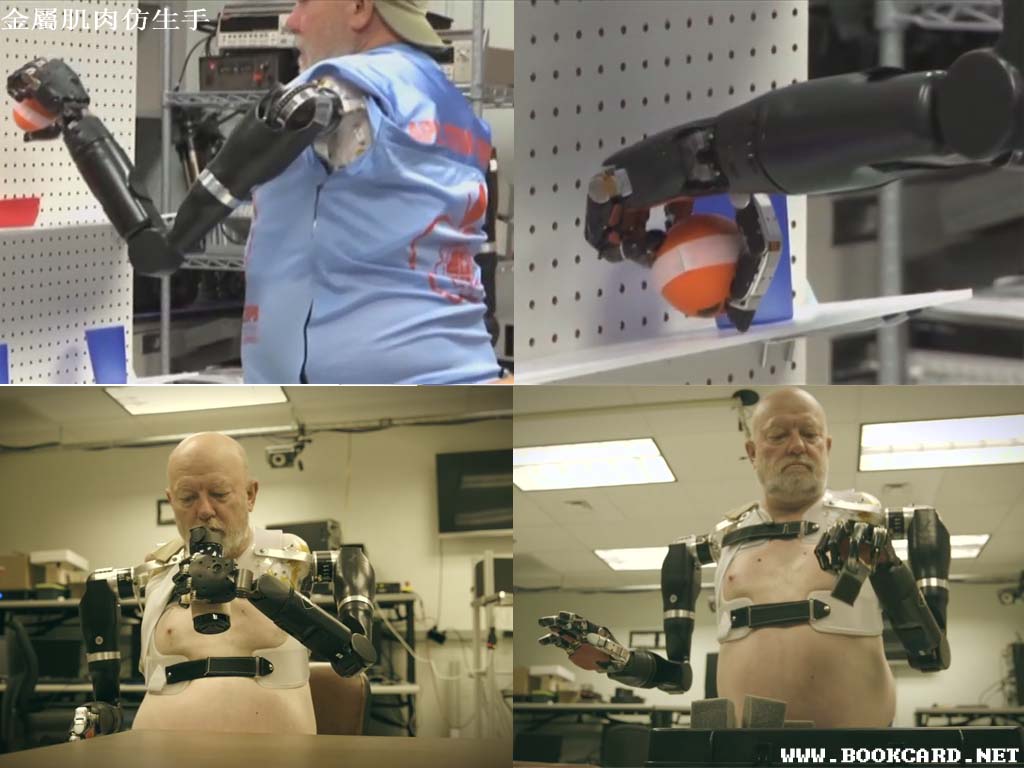
人手是自然界中最複雜的系統.因此製作義肢十分困難, 理想中義肢應該輕便靈活,並且有強大的操控器,由大腦控制.
目前的義肢使用笨重的微型液壓、氣動和電動發動機來伸展人造手指. 但是德國薩爾州大學的科研人員正在試驗一種由鎳鈦合金製成的更為輕便的纖維,當它被連接到電源時,可以改變形狀. 手的運動是由有記憶能力金屬絲驅動的.被到電刺激時線絲就會收縮.我們可以利用這種收縮來活動每個指骨.
試想下成束有記憶能力的金屬絲組合,就可以製作而輕便的人工肌肉和肌腱.通過調整金屬絲的電阻大小,可以分別控制每個手指的伸縮. 不用感測器就能監控手指的位置,只需要利用金屬絲的嵌入式特徵.隨著形狀記憶型合金的進一步發展,製造外觀更為自然的假手將會變得可能. 在不久將來有記憶能力的金屬絲將成為人體的組成部分,使人們能夠真正感受神經刺激,從而把神經信號回饋到微型控制器,然後轉換成對應的信號啟動肌肉. 科研人員正在研究人手的自然運動方式如何被應用於記憶型合金肌肉.
巨型麥哲倫望遠鏡
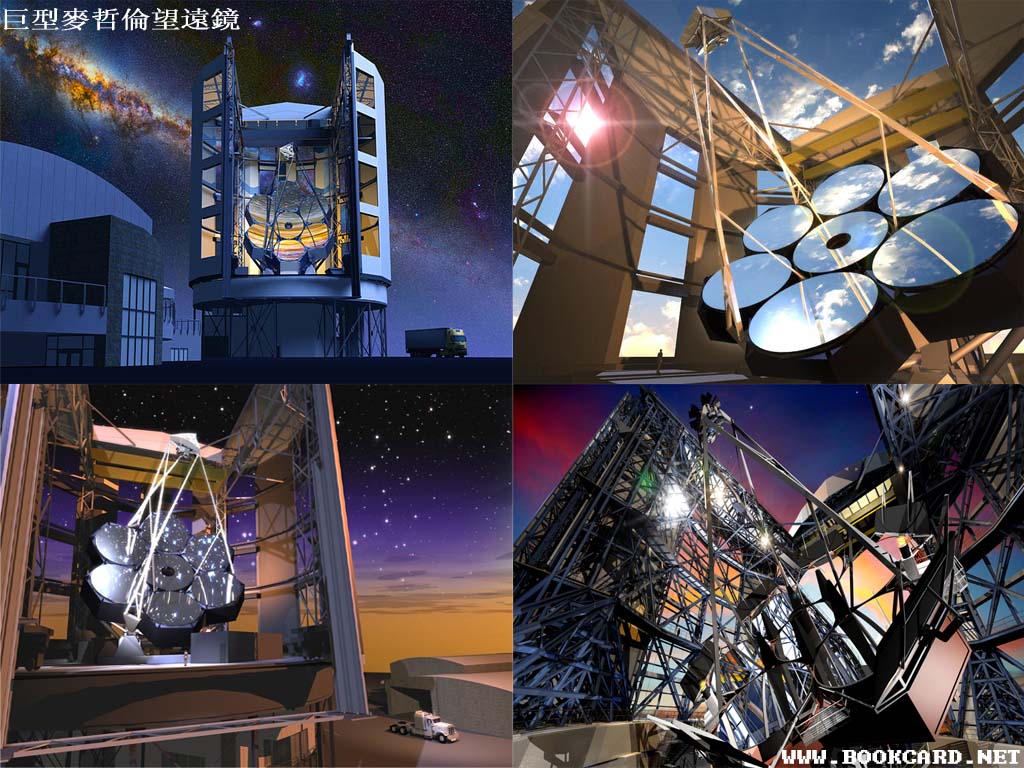
美國太空總署韋伯太間望遠鏡預計將在2018年部署,而同時一個由美國領導的開發集團正準備建造一個以陸上為基地的太空望遠鏡.而且將會是有史以來最大的一台,
哈勃太空望遠鏡給我們帶來了令人驚訝太空照片,它的鏡片大約只有4.5平方米.
詹姆斯·韋伯太間望遠鏡的主晶片將達到25平方米.因此天文學家其待更清晰的觀察結果.但是和正在智利阿塔卡馬沙漠建造的巨型麥哲倫望遠鏡相比,以上兩台望遠鏡都相形失色, 巨型麥哲倫望的鏡片陣列覆蓋面約368平方米.
巨型麥哲倫望遠鏡的負責人”派翠克麥卡錫”介紹:通過觀看可以見到紅外光普的不同部分,兩太新的望遠鏡可以互補合作,可以給我們提供完整的圖景.不論我們是觀看附近恒星周圍的行星,其他星系中心的黑洞還是回到我們稱為”第一縷曙光”的早期宇宙,在”第一縷曙光”中我們看到了最初的星系中,最早誕生的恒星.
為了將望遠鏡與震動隔離,這台一千二百頓望遠鏡將被安置一個由氣浮旋組成的系統上.完全不會有任何磨擦.一系列相機和光普儀將記錄和破譯接收到的光,尋找原子和分子信號,數十億公里傳送過來的光,可能會難以至信的微弱.分隔15到20分種,光子會進來.所以收集光會花費很長時件.就現在的情況而言.每一分種鐘獲取一些光子,但是你需要數百個才能得到一個好的信號.所以很需要耐性.
麥卡錫介紹:對於一台可以敏感到探測月球上一支生日蠟燭的望遠鏡來說,沒人知到會看到什麼.最重要的就是意外,新的發現,意料之外的突破.天文學的故事一直以來都是如此.當你建好一項新的設備,年輕人會發現沒人預想到的東西,或者會證明他們的前輩是錯誤的.
這個價值十億美元的專案,有美國,澳大利亞,巴西,南韓,智利聯合進行.預計將在2022進行第一次觀測.到2026年全面投入使用.
釹磁鐵

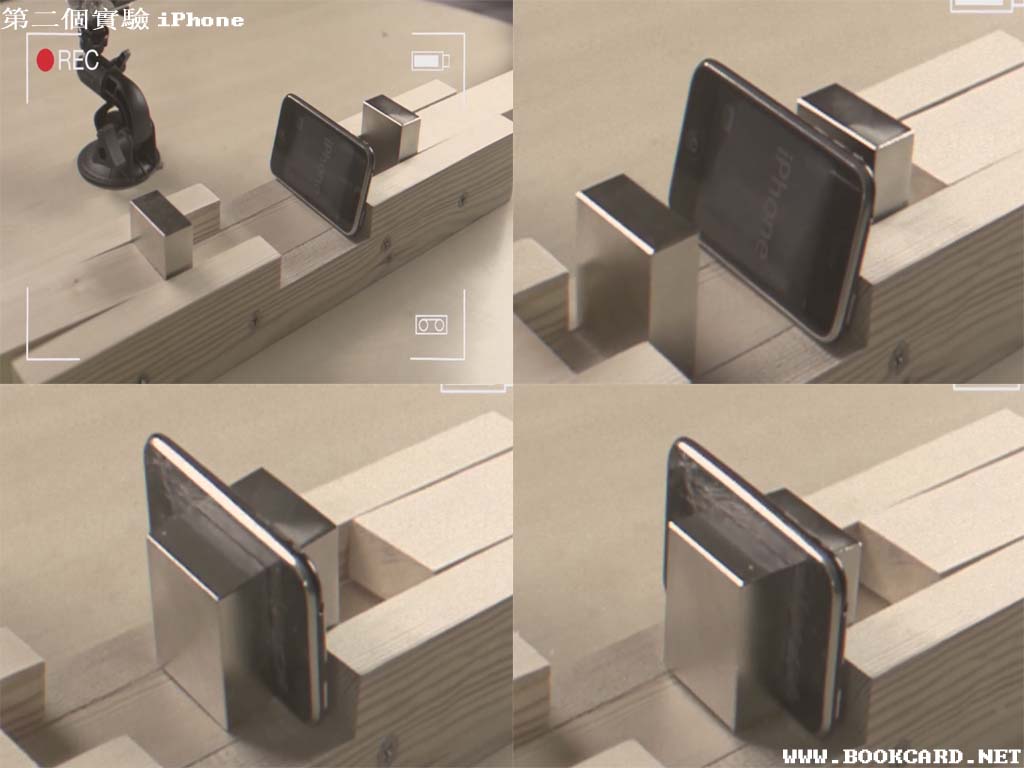
小朋友很喜款玩磁鐵, 磁鐵相吸相斥的過程. 但釹磁鐵就很定無件過.它地球最強的磁鐵,磁磁性的強大能另相撞的釹磁鐵紛碎.
釹磁鐵(Neodymium magnet)也稱為釹鐵硼磁鐵(NdFeB magnet),是由釹、鐵、硼(Nd2Fe14B)形成的四方晶系晶體. 1980年“住友特殊金屬研究所”的佐川真人發現釹磁鐵, 並成功發展粉末冶金法, 通用汽車公司成功發展旋噴熔煉法制作釹鐵硼磁鐵. 這種磁鐵是當今磁性最強的永久磁鐵和稀土磁鐵.
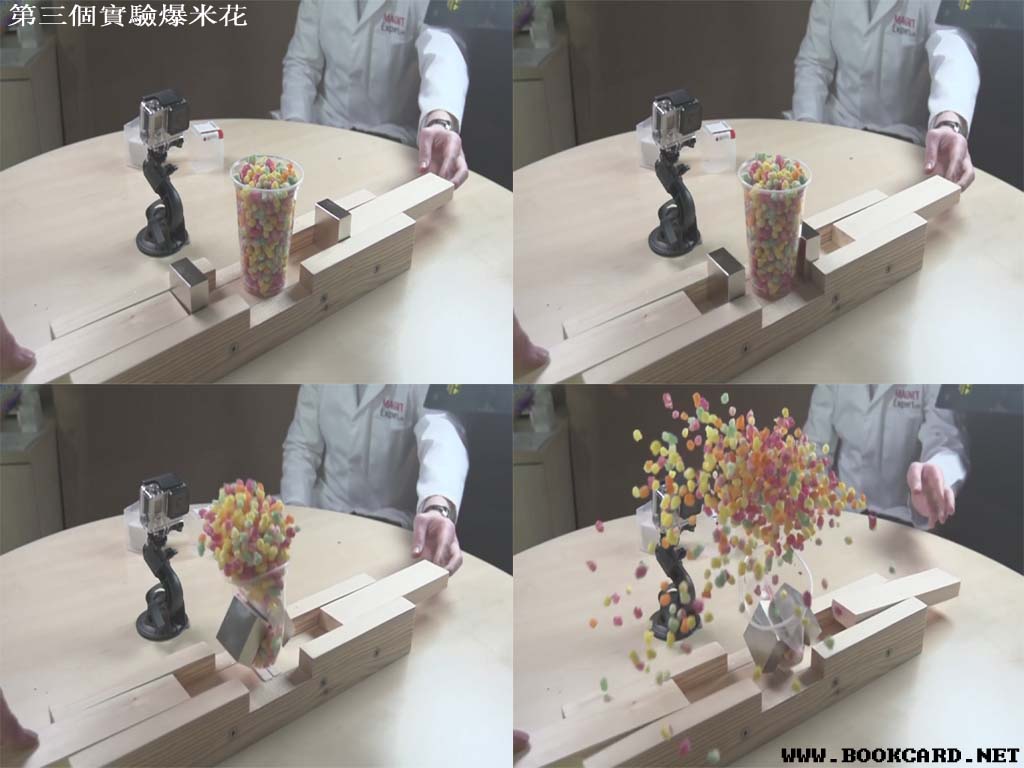
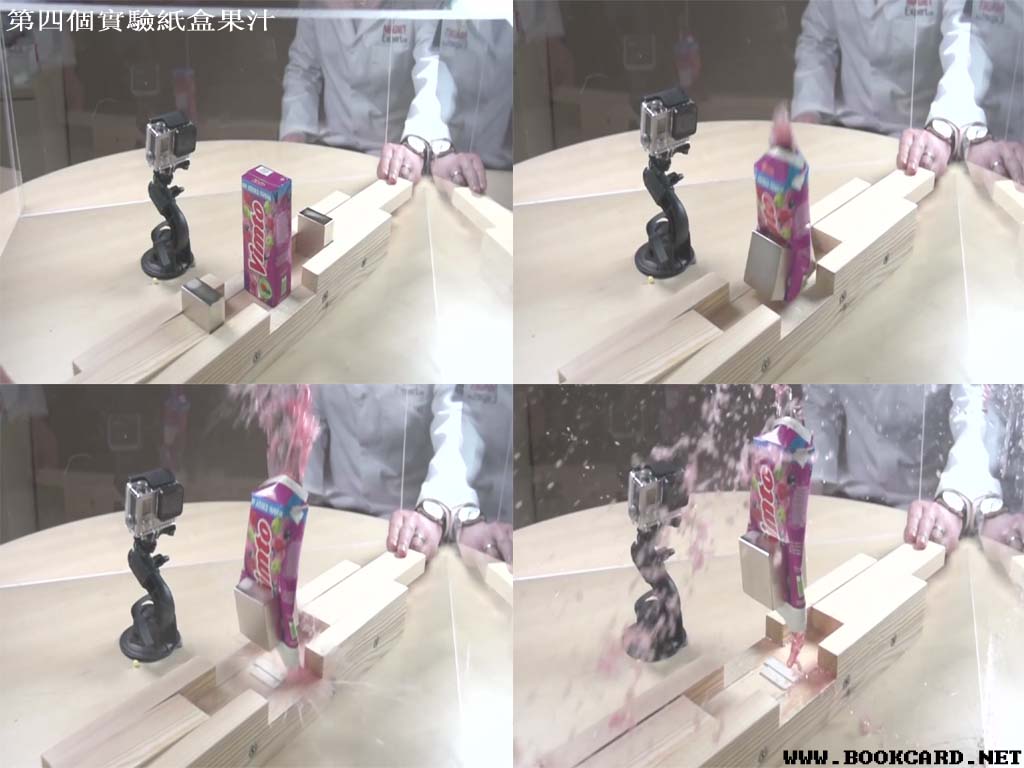
第一個實驗:使用蘋果作為實驗物,極短的距離釹磁鐵極強磁力下蘋果被彈開,而兩塊釹磁鐵紛碎.
第二個實驗:實驗室的常客,犧牲品iPhone手機, 雖然機殼邊框是金屬, 螢幕爆裂!
第三個實驗:爆米花,同樣爆開四散.
第四個實驗:紙盒果汁,紙盒瞬間被擠爆.
拔刀流劍道高手平成武士町井勳對戰安川電機機器人

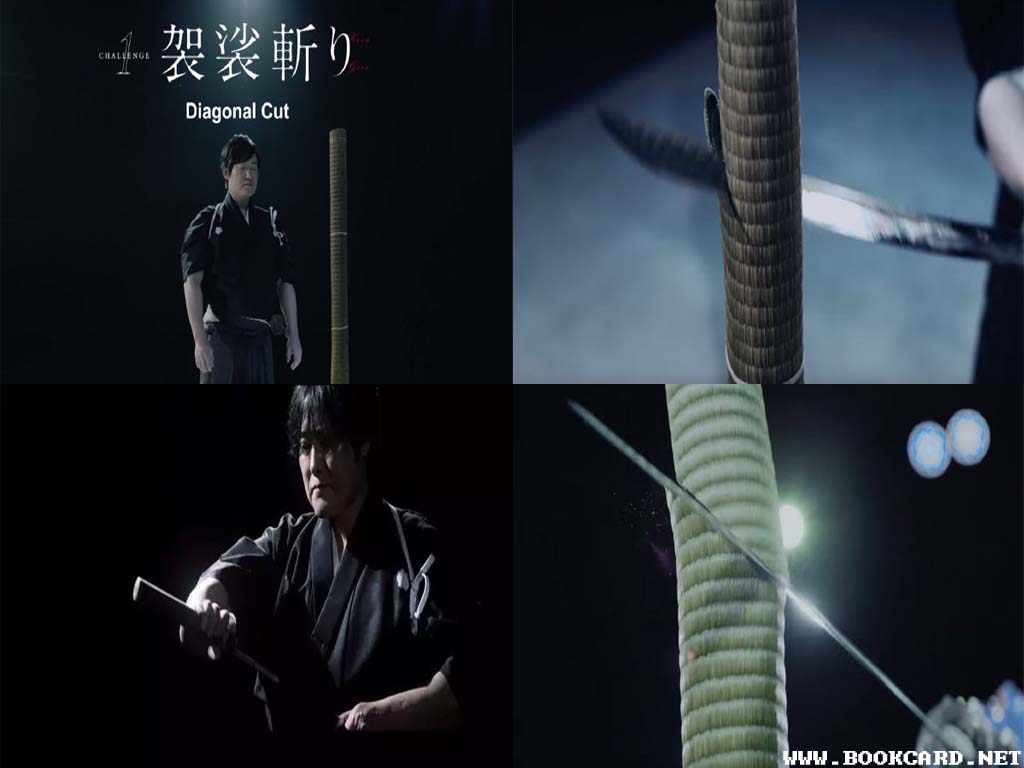

日本大型機械人生產商安川電機自1915年設立以來已經百年,決定展開一項名為 YASKAWA BUSHIDO 計劃,幷製作出一部 MOTOMAN-MH24 劍道機械人, 而現任社長津田純嗣爲了紀念以及讓事業更進一步,找來平成武士居合達人町井勲進行對戰, 影片中展示的居合斬的基本形,分別爲“四方斬”、“袈裟斬”、“斜上斬”、“水平斬”,最後則是世界首次的人類與機器人的”千本斬”挑戰.
袈裟斬:中草席捲(藤席)切口的平整度,就可以知兩把日本刀出自名家手筆.普通刀劍會被輕易砍斷,只有大馬士格刀能與之一比.
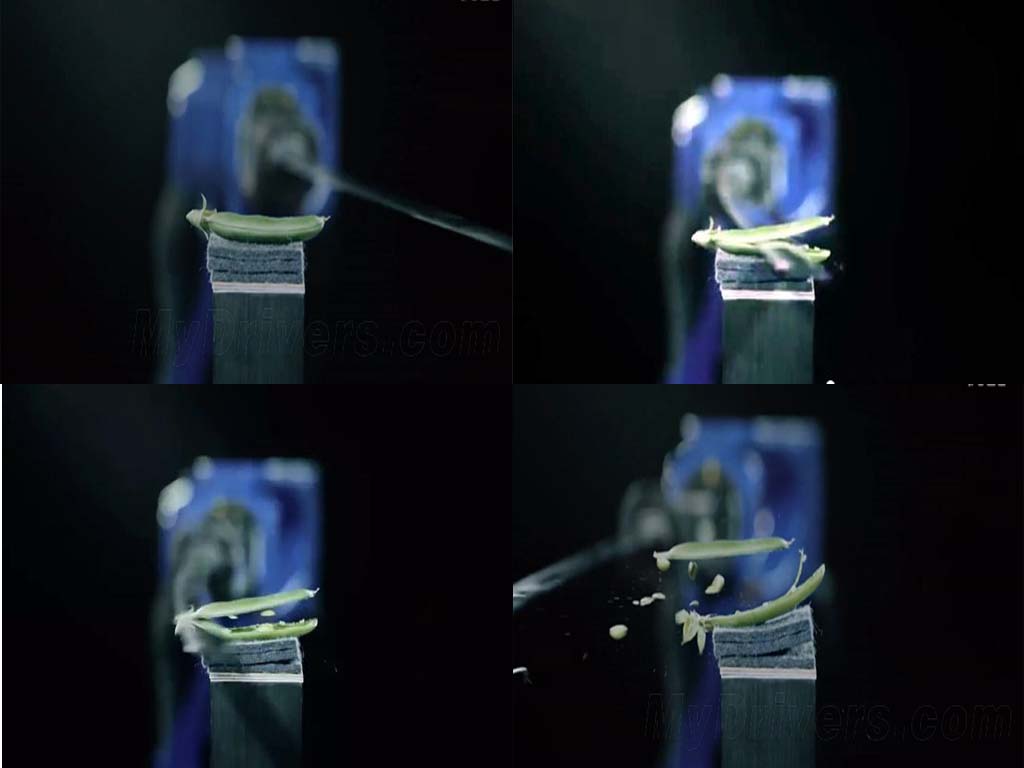
斜上斬:刀刃輕拂過將枚瑰花花瓣,將之斬斷, 唔能將枚瑰花花瓣打散。
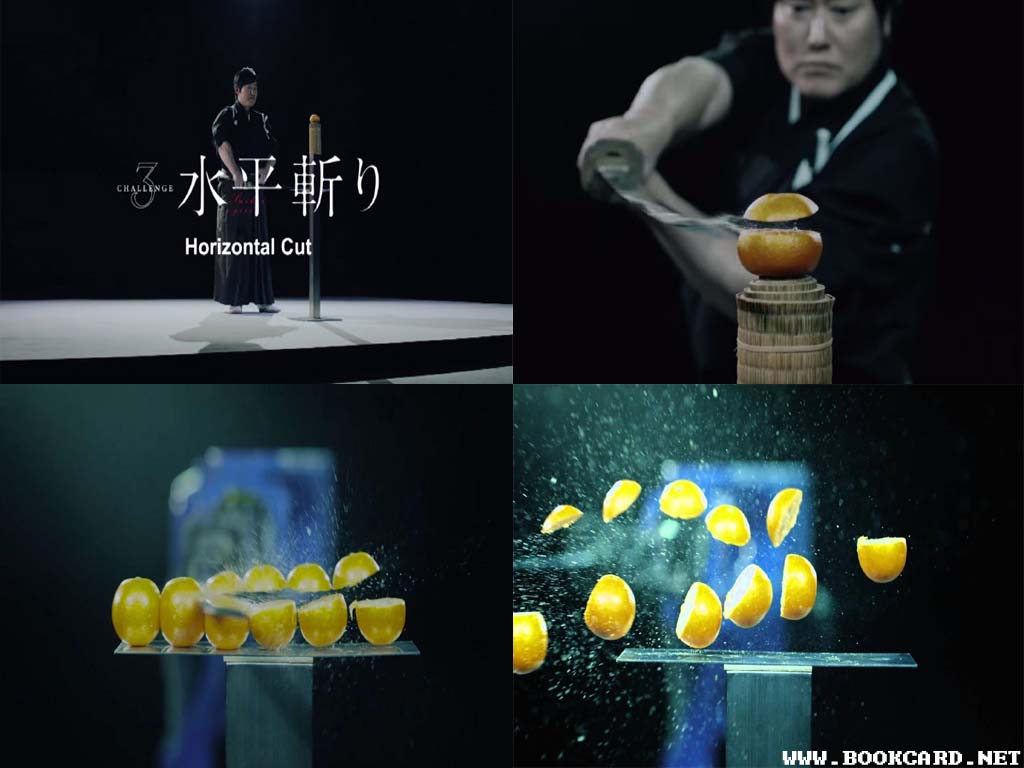
水平斬:中町井勲只劈一個橙,安川的機器人一次劈6個橙.幷且把平躺的豆莢一分爲二!
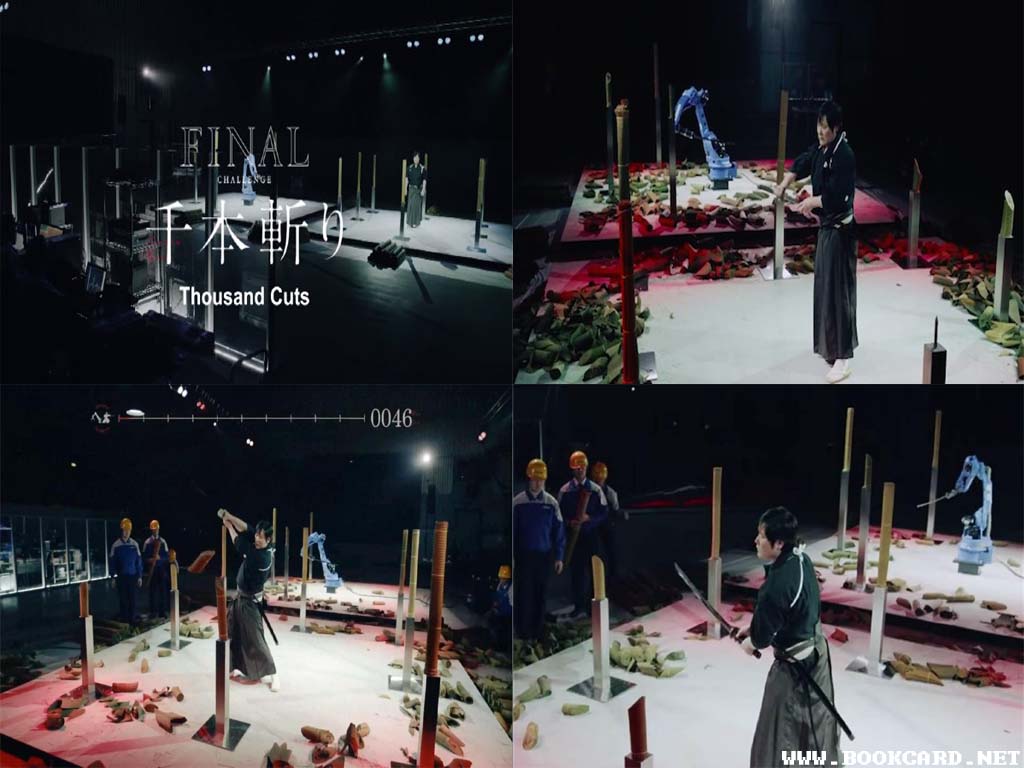
千本斬:在斬斷1千根草席捲(藤席)前,先失誤者輸,若雙方無失誤,則先達成者贏!
町井勳同時也係吉尼斯世界紀錄“千本斬”紀錄保持者,曾創下36分5秒刀砍1000卷草席的世界紀錄.
歐洲火星探測器

歐洲航天局的“微量氣體軌道器”(Trace Gas Orbiter)帶著”斯基亞帕雷利號”(Schiaparelli)於2106年3月14日發射,飛行了七個月,飛離地球四億九千六百萬公里. “斯基亞帕雷利號”火星著陸器於2016年10月16日按原定計劃成功地從母船”微量氣體軌道器”分離之後. 將著陸器將拍攝火星照片, 對火星表面進行科學測量. 其主要目的檢測未來歐洲航天局火星車要使用的技術. “微量氣體軌道器”將繼續進行環繞火星的軌道飛行,分析火星大氣中的甲烷和其他氣體,以決定火星現在或以前是否存在生命.
以19世紀義大利天文學家”斯基亞帕雷利”命名的試驗登陸器肩負著測試進入火星大氣、下降和著陸技術的任務. 為歐洲航天局計畫在2020年在火星登陸器做準備. “斯基亞帕雷利”電力非常有限,登陸火星後的工作壽命也只有3至10天,但其攜帶的多種儀器可協助地面專家分析火星大氣的密度、壓力、溫度等情況,
歐洲航天局計畫在2020年向火星發送一個火星車,配備一個電鑽和其他器械,用於探索那裏的地質化學,尋找生命跡象.
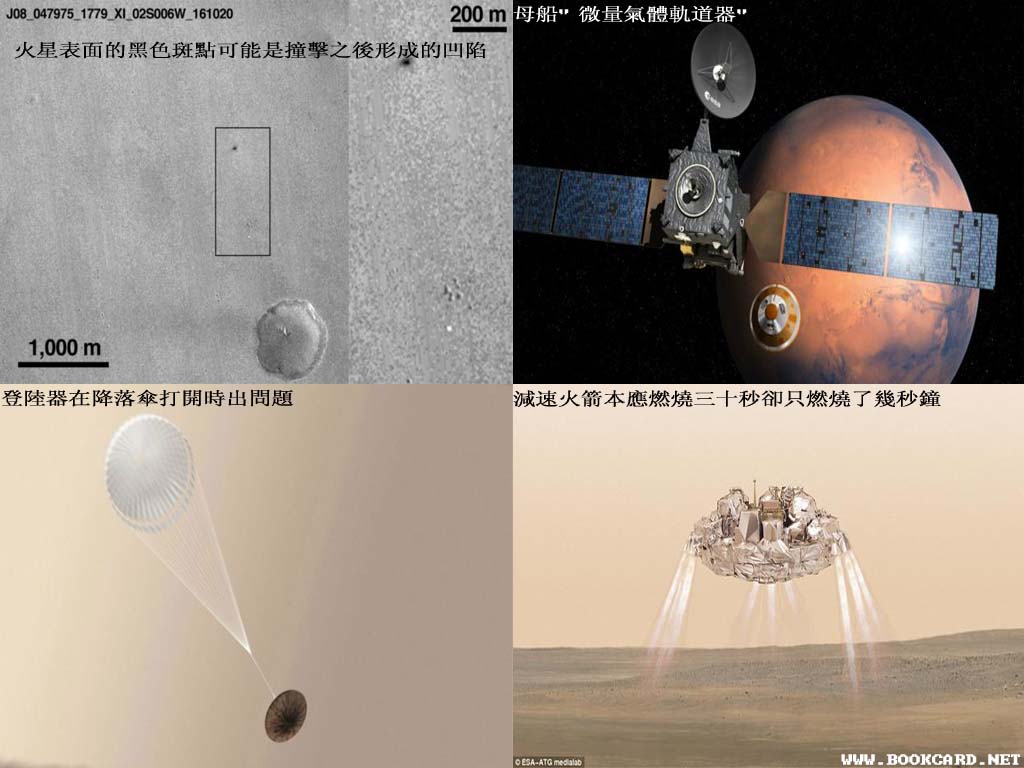
“斯基亞帕雷利號”於2106年10月19日于火星著陸時墜毀,高度大約2千米至4千米高時,離原定著陸時間僅乘50秒,無線電通信失去聯繫, 它的降落傘打開得太早, 減速火箭本應燃燒三十秒,卻只燃燒了幾秒鐘. 令墜毀時速超過300公里. 火星表面的黑色斑點可能是撞擊之後形成的凹陷
全玻璃天橋


位於中國大陸張家界的天空步道高298.7米(980呎),長達約429米(1410呎),寬約5.7米(19呎),可以同時承載800人, 两侧分别与悬崖连接,中间没有任何支撑,桥面全部采用透明玻璃铺设,桥中心有全球最高的蹦极台,整个工程无钢筋支架,全玻璃结构的桥梁.打破多項世界紀錄成為世上最長最高的全玻璃天橋, 被CNN列入世界11座最壯觀的橋之一.在2016年7月開放給遊客參觀.大峽谷門票120人仔,玻璃天橋要另外買票130人仔,加上電梯費用,總費用要300人仔.
由以色列建築師Haim Dotan設計. 除了可以欣賞曾為《阿凡達》潘朵拉星球構思來源的美景外, 設計師還打算在天空步道上進行時尚走秀.

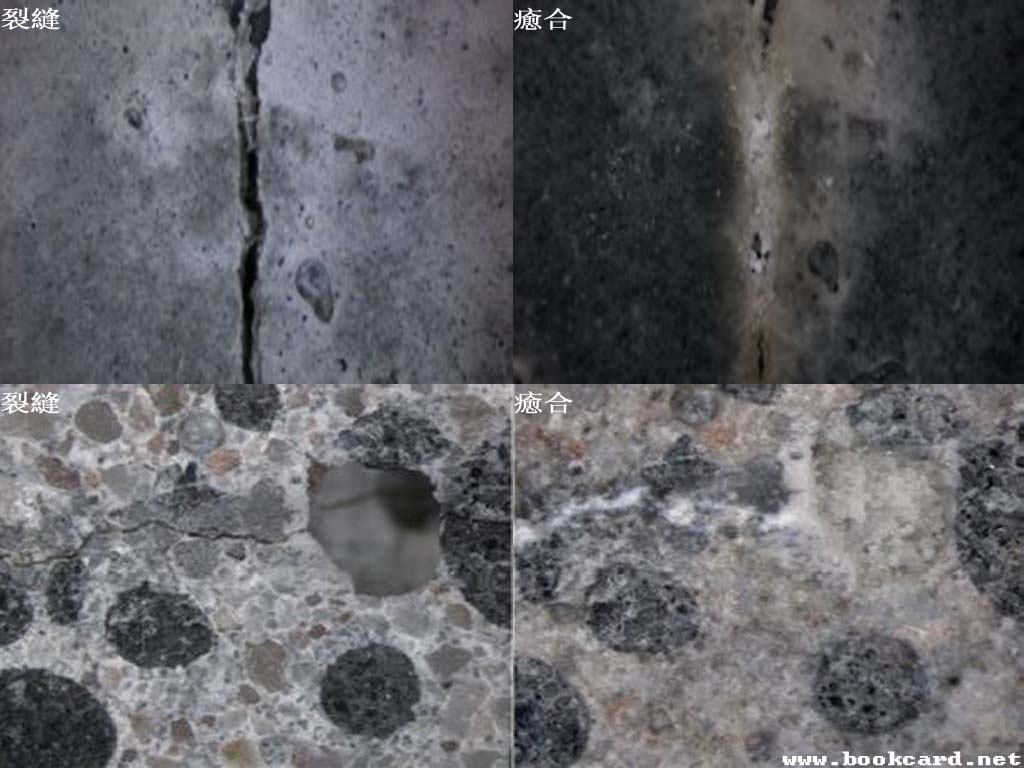
混凝土最常見的建築材料,已有兩千年歷史.雖然混擬土比一般的木質建材要堅固,但缺點是混擬土最多就30至50年的強度保證, 不管多麼小心地混合混凝土,最終都會出現裂縫. 裂縫雖然只有幾毫米大小,對整體結構並不礙事, 但時間長了, 酸雨將會滲透這些裂縫,然後腐蝕混凝土與支撐結構的鋼筋,最後導致建築結構的損壞,造成建築蹦塌!
荷蘭代爾夫特理工大學的鍾克斯(Henk Jonkers)微生物博士水泥開發專家施朗根(Eric Schlangen)合作,研發出自我癒合的“生物混凝土”, 阻止水泥出現裂縫,延長建築物壽命. 因為混凝土非常乾燥而且鹼性極強.兩名專家將一種嗜鹼性孢芽桿菌和乳酸鈣裝進生物降解塑膠做成的膠囊, 把膠囊加入到濕的混凝土中混合. 鹼性孢芽桿菌在沒有食物和氧氣的情況下能存活幾十年.“修復細菌”在被水啟動之前,必須長年處於休眠狀態. 鹼性孢芽桿菌可耐高低溫,而且其休眠期長達200年,足夠長期修復大部分建築物的水泥外牆。
生物混凝土和普通混凝土看起來是一樣的, 只是添加了“癒合膠囊”.當混凝土出現裂縫後,水進入裂縫打開膠囊, 細菌則開始發芽繁殖並食用乳酸鈣,通過代謝把鈣和碳酸離子結合,形成方解石或石灰石,逐漸彌合裂縫. 平均3周內就能修復裂縫。

十八世紀鐘錶技術蓬勃發展,齒輪裝置發展到空前高峰!瑞士鐘錶師”皮埃爾•雅克德羅”Pierre Jaquet-Droz(1721-1790)設計並製造機械人.存世一共有四見. 作家(The Writer)、畫家(The Draughtsman)與音樂家(The Musician),約在1768到1774年間被製造出來.還有故宮的“銅鍍金寫字人鐘”.

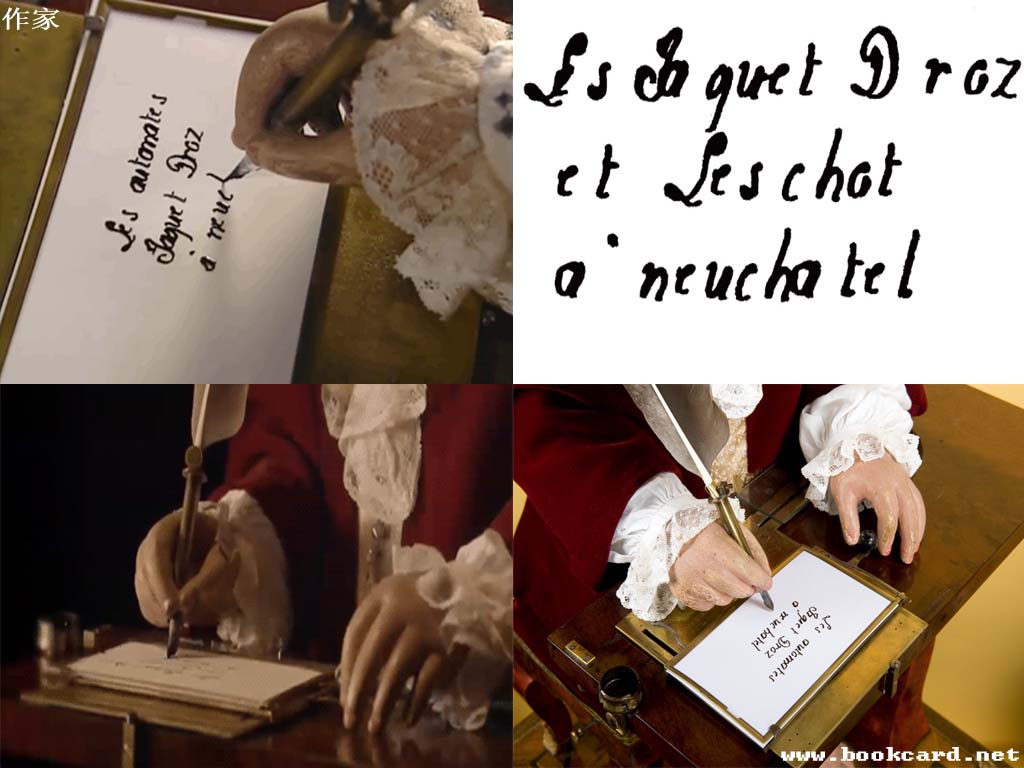
作家(The Writer)由六千多個部件組成, 於1768年完成.所有零件被改量並縮小.放置在人偶的體內.機械人抬起右臂用羽毛筆桌子右側蘸墨水, 然後在白紙上寫40個字母長度的句子和詞語. 機械人的眼神還能隨書寫位置而移動.由於製表匠採用了內穩態的設計(一種機器自校準程式)和微縮技術,機器男孩不需要外部動力即可運作,動力全部來自機器內部,機器人的核心部分由40凸輪組成縱向凸輪組.隨著凸輪組運動,三根凸輪隨動件解讀出凸輪的形狀.轉變成機器人的手臂動作.在機器的配合下, 凸輪控制了羽毛筆的每個筆劃和下筆的精確力度.才能寫出美麗流暢而優雅的字體.如此巧奪天工的機器,恰恰是”皮埃爾•雅克德羅”對書寫過程的向設計.機器人內部還有很多令人吃驚的特點.控制凸的輪盤軸可隨意移動,排列和替換字母的組成.原理上機器人可以寫出任意詞語和任意句子.也就是講,可一對機器人進行編程. 被認為現代電腦的“始祖”.

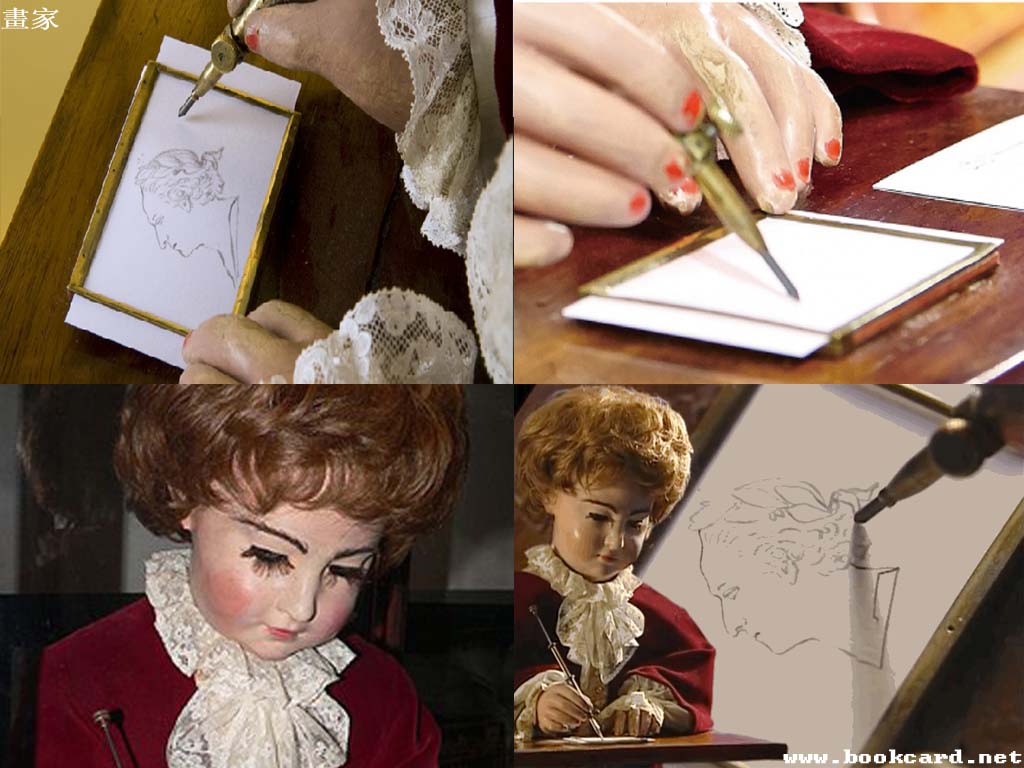
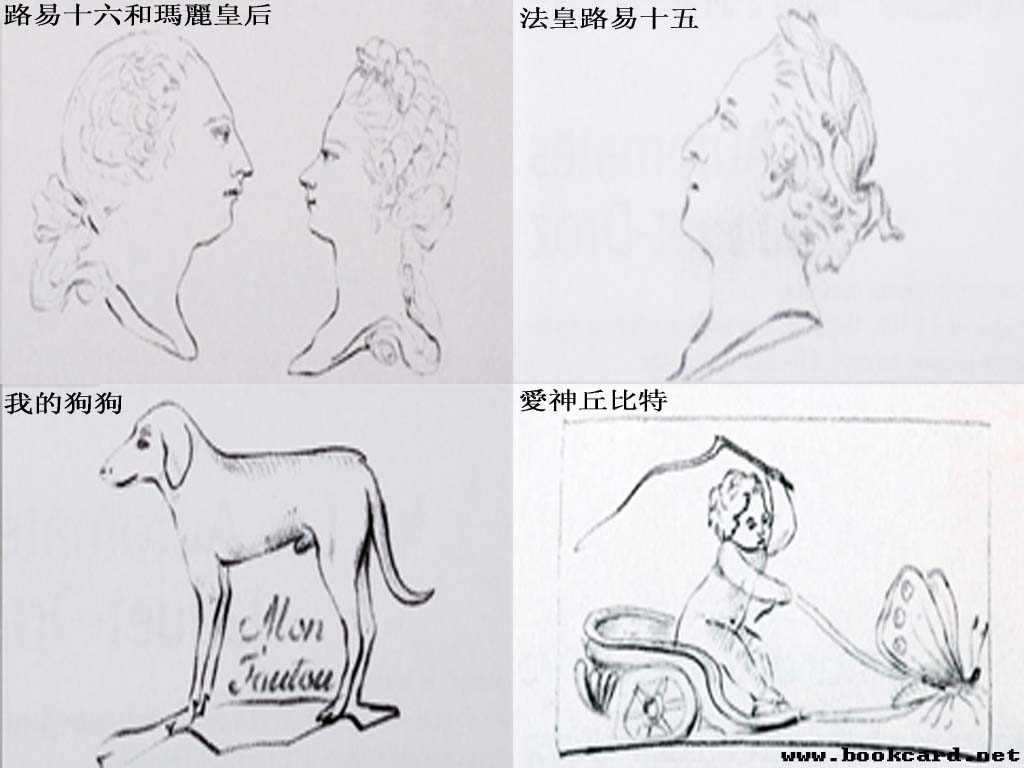
畫家(The Draughtsman) 由二千多個部件組成, 由”皮埃爾•雅克德羅”Pierre Jaquet-Droz的兒子”亨利路易•雅克德羅” Henri-Louis Jaquet-Droz僅花費兩年於1774年完成。可以用鉛筆畫出四幅不同的圖案,包括法皇路易十五的側面人像、路易十六和瑪麗皇后一起的圖畫、一隻狗下面加上法文”Mon Toutou” (我的狗狗)、最後是愛神丘比特坐在一台由蝴蝶拉動的兩輪座駕上.同時畫家會一邊畫、一邊還定時吹氣把鉛筆的筆屑吹走,機器人會根據畫的位置不斷移動手臂.機器人由垂直升降的凸輪組成,控制機器人手部活動.
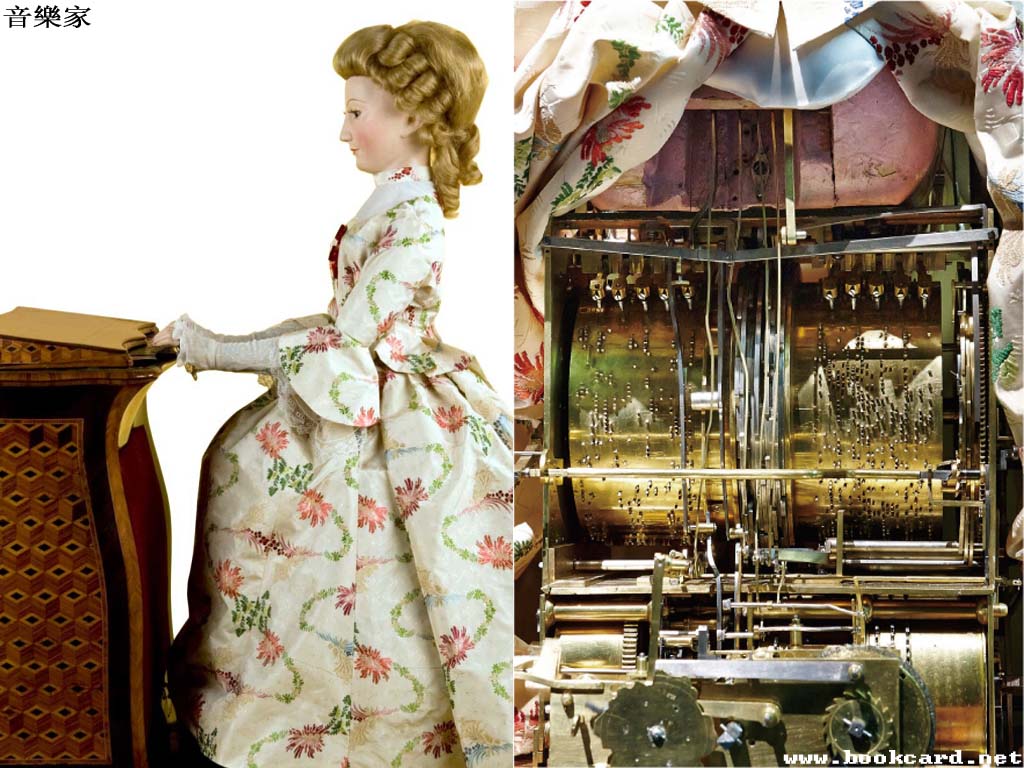

音樂家(The Musician) 由二千五百多個部件組成, 由”皮埃爾•雅克德羅”Pierre Jaquet-Droz的兒子”亨利路易•雅克德羅” Henri-Louis Jaquet-Droz所製作,音樂家所彈奏出五音階的樂曲,也是亨利自己所譜.音樂家是女生機器人,她是不是以手指去按琴鍵,用真正的琴彈出音樂,與過去一般只動手指卻不會彈琴的人偶不同,而且它彈琴時,胸口還會像真人呼吸似的一起一伏,彈完之後,更會點頭表達謝謝觀眾. 機器人的機芯中央有一根類似音樂盒中所使用的滾筒,滾筒表面的突針是與杠杆聯動,進而讓杠杆控制手指的動作,彈出正確的樂曲.
這些機器人送給國王貴族, 或在上流社會中進行展出. 幫助他的公司”雅克德羅”售出更多的鐘錶和機器鳥。這家公司還在出售他們的手錶. 據「納沙泰爾藝術與歷史博物館」(Musée d’art et d’histoire de Neuchâtel)館方表示,這三具活動人偶後來分別被”雅克德羅”家族賣掉,百年間在歐洲大陸歷經轉手,最後由一位德國收藏家取得,並在1909年時再轉賣給瑞士納沙泰爾地區的法人團體,才得以合體回到它們的故鄉瑞士,並保持良好的狀況收藏在博物館中.時至今日,這三樣傑出作品依然可以正常運作,展示在瑞士「納沙泰爾藝術與歷史博物館」,並已成為該館鎮館之寶,定期展示於博物館中。
銅鍍金寫字人鐘

銅鍍金寫字人鐘,高231cm,底座77×77cm. 1812年製作.此鐘為銅鍍金四層樓閣.頂層圓形亭內,有兩人手舉一圓筒作舞蹈狀,啟動後,二人旋身拉開距離,圓筒展為橫幅,上書“萬壽無疆”四字.第二層是鐘的計時部分.第三層有一敲鐘人,每逢報完3、6、9、12時後便打鐘碗奏樂.底層是寫字機械人,是此鐘最精彩、新異,結構最繁複的部分,它與計時部分機械不相連,是一套獨立的機械設置,只需上弦開動即可演示。寫字機械人為歐洲紳士貌,單腿跪地,一手扶案,一手握毛筆,在飽蘸濃墨並上弦之後,便在面前的紙上寫下“八方向化,九土來王”八個漢字,是乾隆最愛的趙孟頫字體.在寫字的同時,機械人的頭部隨之擺動.雅克德羅——“雅”和“德”都是乾隆極愛使用的字眼,“羅”更是“愛新覺羅”的“羅”. 這座寫字人鐘是乾隆皇帝的心愛之物,以至於退居太上皇之後,還命人把它搬到自己養老的宮殿,以便隨時欣賞把玩.

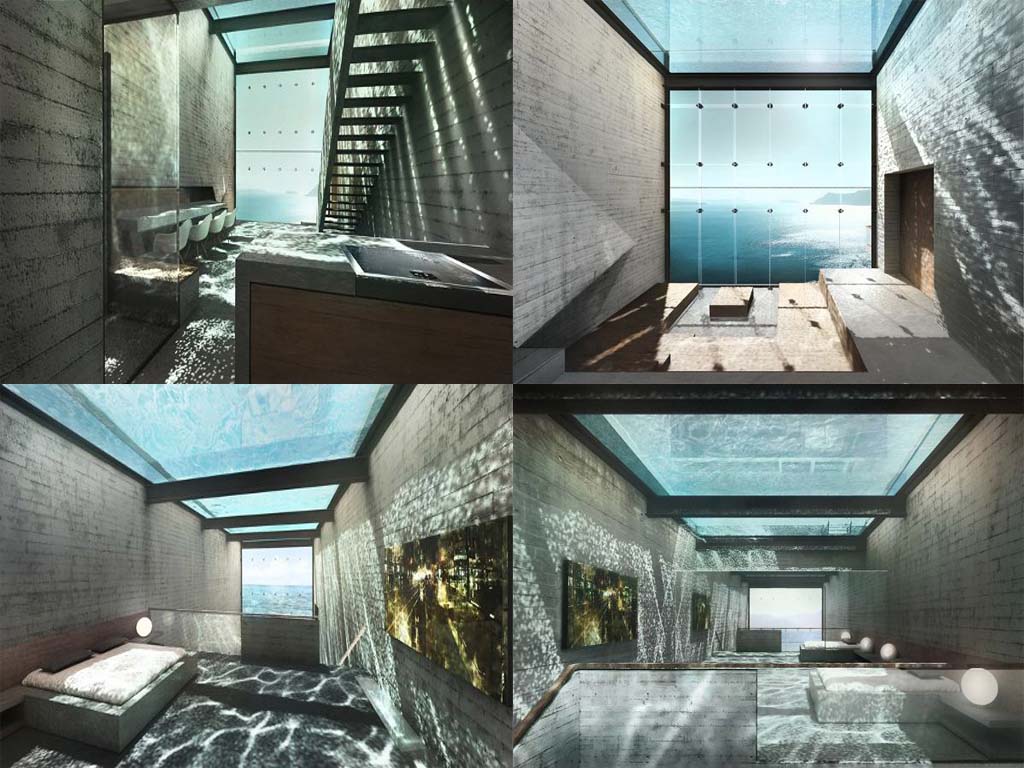
懸崖邊上的豪宅
懸崖邊上的棺木,稱懸棺. 懸崖邊上的豪宅,你可能沒有見過, 義大利建築師Adalberto Libera設計「Casa Brutale」別墅建在愛琴海上方,整個建築與地表平行.左右兩側皆是山壁.建築的頂部是全透明強化玻璃游泳池, 池底也透明玻璃.水池跟海面連成一線.生活空間就在池底下面.就像巨大的天窗.面向懸崖是自上而下巨大玻璃牆,愛琴海的景色一覽無遺. 無論在任何時候看都像是一幅畫
因為生活空間全部在玻璃游泳池底部,白天陽光經過水池水的阻隔熱量.但又能夠充分的採光.晚上又能觀看夜景.而且景色特別寧靜,自在享受私人空間

最兇武器「金屬風暴」
「金屬風暴」武器發射系統是由邁克˙奧維爾(MikeODwyer)發明, 奧維爾是一位澳大利亞槍械愛好者,在業餘研究提高手槍發射速度時,試用了種種機械辦法,射速都沒有太大提高, 在國家水族館觀賞海洋動物時, 烏賊魚遇險噴墨逃生的情景,激發奧德懷爾的思路.
「金屬風暴」的武器,無傳統的機械操作部件, 發射系統由裝有彈藥的槍管、電子脈衝點火節點、電子控制處理器等組成。發射小粒彈丸.彈丸長約20毫米,是普通子彈的一半或更小,因此一枝槍管容納子彈的數量大大增加.而電脈衝發射技術能使槍彈發射速度提高幾百倍。可在一秒鐘之內發射一萬六千發特製的武器彈, 幾輛坦克在一排發射之後,頃刻閑化為烏有.而且這項技術可以用於任何武器上,敵人一定可以快速殲滅!
2004年,美國的五角大樓起草了一份《主要軍事技術名單》,「金屬風暴」就排名第八.

建立月球基地
美國總統奧巴馬希望人2030年前往返火星的計畫,但是火星太遙遠,以現在的化學助推劑,飛行時間需要九月,來回則需要十八個月.可能需要20到30年才能實現.
但在相對更近的月球上建立基地.去月球只要三天,來回六天.而且美國國家航空航天局證實月球兩極有水存在.月球南極地處月球環形山邊緣地帶,幾乎可以提供全時段的日照.利用太陽能電池產生的電力可以用於分離水分子中的不同元素.電解水後得到氫氣和氧氣,再把它們液壓,那是我們已知的最強的化學助推劑.開採月球礦產資源的基地和月球火箭發射場.月球上引力較小,飛行器只需用很小的推力,擺脫月球的引力前往火星.
在月球並建立永久基地.利用3D列印技術,原料使用月球上的土壤.加上可移動的龍門和噴嘴,建造大型建築,在電腦控制下可在24小時內建造出房屋.月球上建造基地的難點在於如何利用月球土壤等物質,從地球上送去機械設備,材料則就地取材,建造費用將大副降低,這意味著月球基地建造會比想像中便宜很多.把月球作為送人往返火星的第一站.將不在科學家設想.
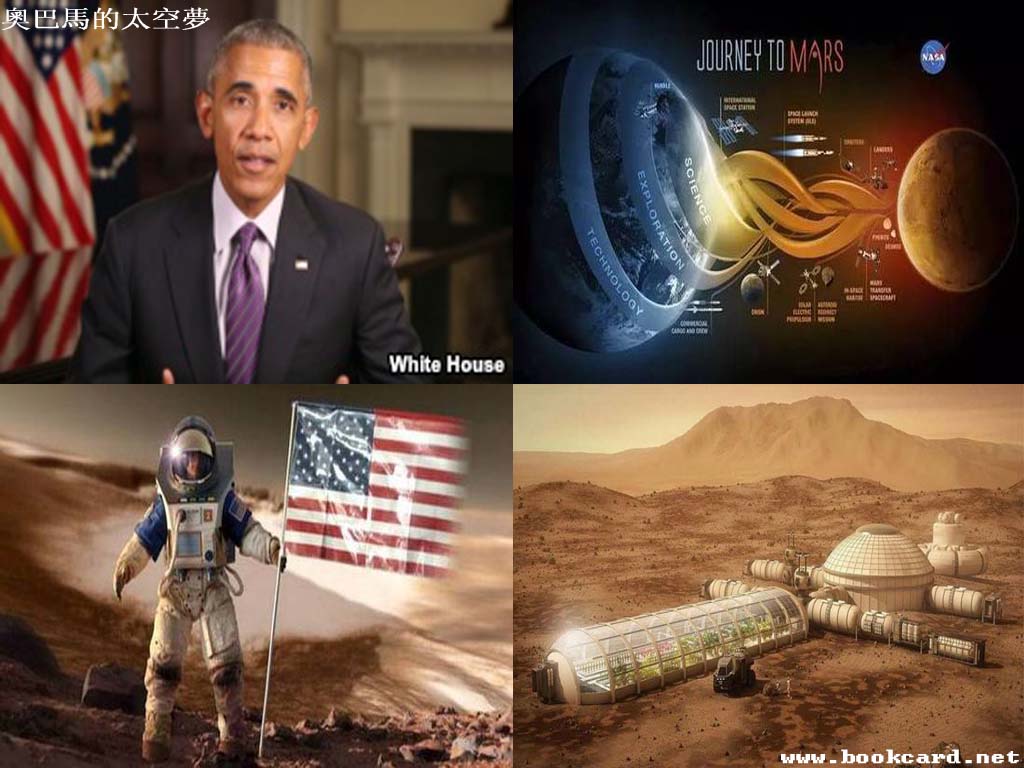
2016年10月11日美國總統奧巴馬美國有線電視新聞網CNN的網站上發表署名文章. 闡述他的太空夢. 他為美國的太空科研設置了明確的目標,在2030年之前,把人送上火星,並將他們安全送回地球,而最終在火星上建立殖民地.美國政府正在和私企合作將人送上火星的項目.美國政府和私企合作構建可供人在火星居住設施.登陸火星的夢想,不是一時半刻可以圓的,這中間還有好多工作要做,其中要培養下一代科研人才. NASA選擇了66家美國私企來實現火星計畫。這六家公司分別是:畢格羅航空航太公司(Bigelow Aerospace of Las Vegas)、波音公司(Boeing of Pasadena, Texas)、洛克希德·馬丁(Lockheed Martin of Denver)、ATK軌道公司(Orbital ATK of Dulles),Sierra Nevada公司,NanoRacks公司。
美國私企目前佔有全球商用發射市場的三分之一,美國私企將在今後兩年內把宇航員送到國際空間站去。2024年後把國際空間站移交給私營企業繼續運營.
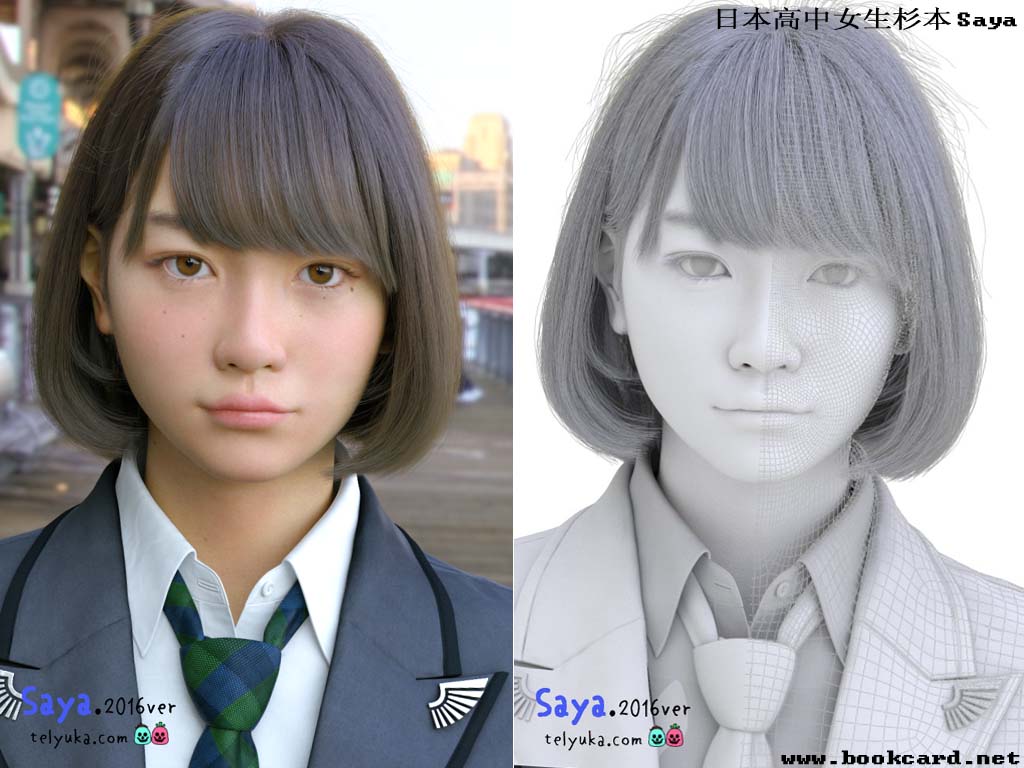

網路上爆紅的高中女生杉本Saya,無論你如何認真查看,你都無會發現著女生杉本有什麼特別之處. 但她其實根本不是真人, 這女生是用電腦3D繪圖作出的超寫實人物, 由日本藝術家石川夫婦製作. 花了一年時間重新雕刻杉本的臉部,不斷讓杉本的形象更完美. 為了讓她看起來更像真人,她的身體從頭到腳都重新改進過。真實的18歲校園少女,戴著領帶,梳著劉海,面部有小雀斑,微微噘嘴.
杉本最開始是作為短片中的配角被創造出來,杉本當前只是靜止圖像,現在石川夫婦正在著手讓杉本動起來.讓杉本出演的電影.
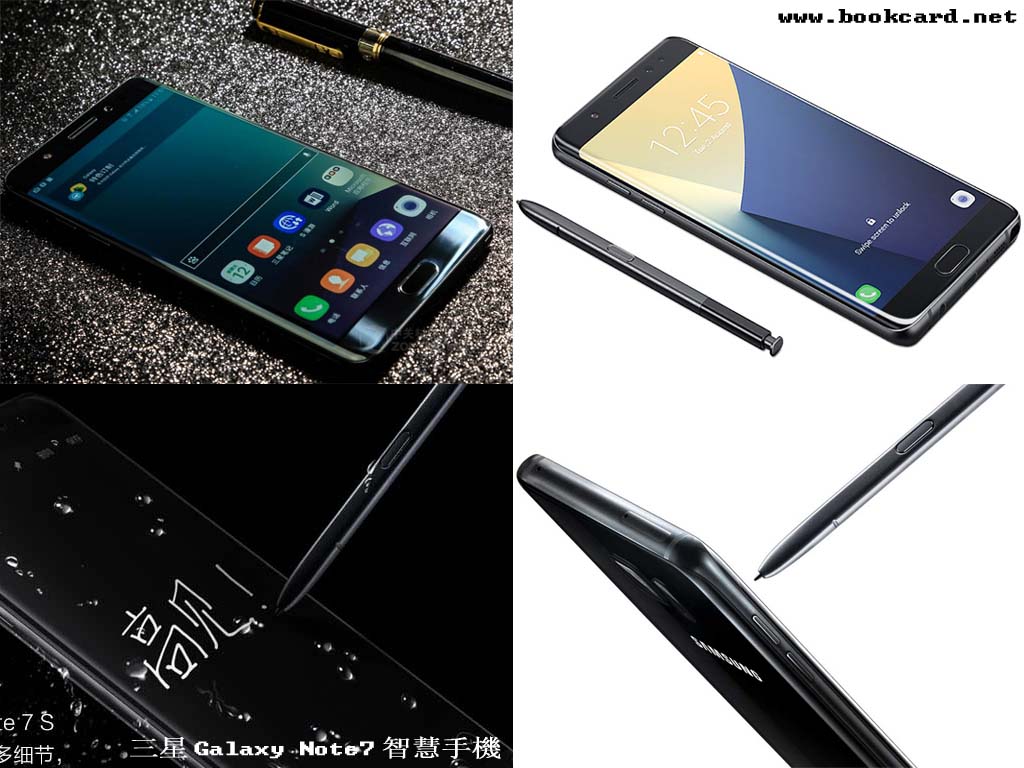
三星暫停生產Note7手機
三星暫停生產Galaxy Note 7智慧手機,以確保產品安全。並配合各國的消費安全主管部門的調查. 許多運營商已經宣佈,已經更換了新Note 7的消費者可以前來更換其他手機。
三星自2016年8月發佈Note 7已來,發生多起手機起火事件, 三星證實手機電池生產中出問題,在9月召回250萬台手機。但替換後的手機依然有起火問題。
在社交媒體上張貼了Note 7手機燒焦的照片,聲稱他們的手機無緣無故起火.
2016年10月5日,美國西南航空公司航班因一名乘客的已更換的Note 7手機冒煙,並緊急立即疏散機上的乘客..
Note7的召回與起火事件令三星面臨了成立以來最大的危機。`這一消息讓三星股價大跌。由於美國政府有明確下令召回並停止發售Note 7手機,所以任何人私下販賣這台手機,不管是個人或在網路上,都是違法的. 其產品在高端市場遭到蘋果的擠壓,在低端市場又面臨中國廠商的競爭。
情感機器人Pepper佩珀
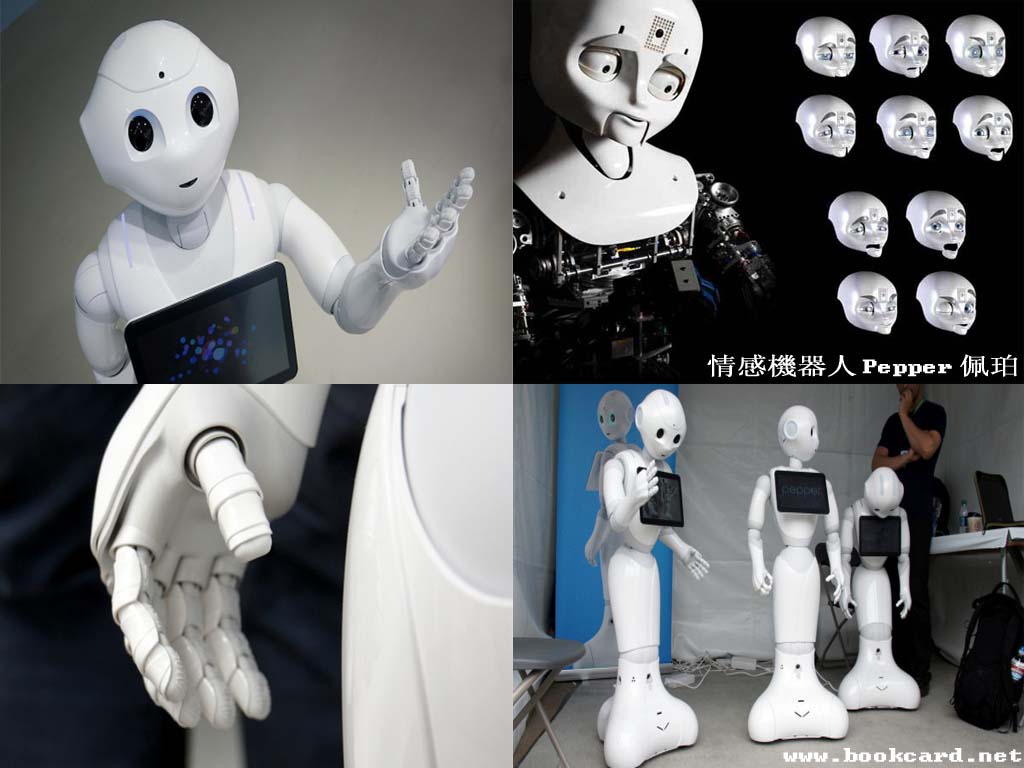
情感機器人Pepper”佩珀”,一款能判斷人表情和語調的機器人,.判斷人情感,並作出獨特的回答, 與人相處中不斷學習,佩珀身高有4身高1.2米,體重28公斤, 旋轉底座由三個滾輪所組成,手臂的每一根手指都能靈活運動, 當你走近時,它的黑色大眼睛會盯著你, 佩珀聽力並不是很好,盡可能地接近它的才能聽到. 當其中一個”佩珀”講話時,另一個會時不時插嘴說一些笑話。佩珀售價為2000美元,每月200美元於雲端費用. 佩珀每個月都會對外發售1000台, 全在一分鐘內全被搶購.
其實佩珀並不能理解人情感與語言,只是不斷搭訕聊天而已,但也不能表達臉部表情,只能胸口顯示幕上表達感受.基於語音識別引擎,記住長相等基本需要安裝App.軟銀宣佈將上線Pepper 機器人的應用商店。佩珀原是法國機器人公司Aldebaran.日本電信公司軟銀集團於2012年收購Aldebaran後將其改名為軟銀機器人控股公司.
波士頓動力公司(Boston Dynamics)發佈SpotMini

波士頓動力公司(Boston Dynamics) 發佈了最新一代的四足機器人 SpotMini是Spot的升級版本,不過體形更細小, 更能夠靈活的行走和躲避,還借助了豐田技術, 增加了可靈活運作的機械臂,功能更為強大。不裝機械臂,體重僅55磅(約25KG)。安裝機械臂之後, 體重為65磅(約29.5KG).Spot驅動是液壓,而SpotMini則全電動. 體型和重量的上改進, 使SpotMini匍匐前進.因為使用內置的電池, 充滿電後可運行90分鐘. 最重要的解缺雜訊問題. 美國海軍陸戰隊就因為AlphaDog“犬王” 雜訊太大而不要它的. SpotMini 的特徵是前方安裝了機械臂,看起來就像一條長頸狗頭,
看看下面的GIF圖,轉身壓要一氣呵成,當前方的障礙物有空隙時,它可以的鑽過去. 躲避各種桌椅、櫥櫃等傢俱. 像寵物狗上下運動和扭屁股,原地打轉,但頭部保持穩定, 如果踩到蕉皮滑倒可以利用機器手臂把自己撐起來, 快速爬樓梯, 把水漕裏的杯子放進洗碗機, 把廢棄的易拉罐丟進垃圾箱, 拿冰凍啤酒遞給主人.被猛踢一腳也不跌的驚人平行力. 安裝上致命武器,可以用於拍攝”終結者2020”.










波士頓動力公司(Boston Dynamics)
1992年波士頓動力公司(Boston Dynamics)從麻省理工學院(MIT)分離出來獨立經營,後一直從事軍事專案的研發工作,與美國政府和軍方關係密切,它與美國陸海空三軍簽訂了諸多專案合同,獲得大量研究資金。於2013年12月16日,被Google收購, 於201年6月1日轉手豐田. 波士頓動力的願景是讓機器人有與人和動物一樣的移動、靈活、感覺和智力,甚至超越。ATLAS 就是實現這一目標道路上的一步。
這家公司研發過多款機器人,但未有一款進入民用市場銷售. Google 希望波士頓動力能夠早日商業化,而波士頓動力希望能做基礎的研究。

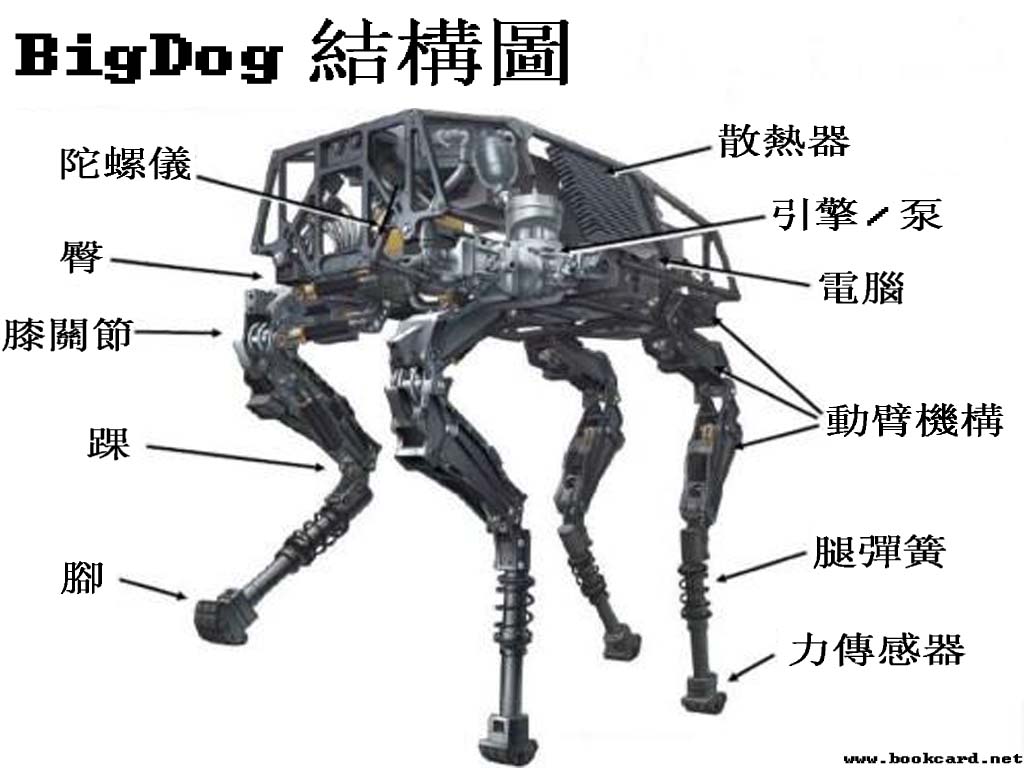
AlphaDog“犬王”的軍用機器步兵班支援系統(Legged Squad Support System,LS3), 2008 年研發時它稱為BigDog”大狗”,兩年後獲得美國國防高等研究計畫署3,200 萬美元採購合約,後來又追加簽署 1,000 萬美元合約。製造這種機器人的設想是,海軍陸戰隊員身背的裝備越來越多,機器人馱獸可以解除他們行軍打仗的負擔。LS3據說能夠承載超過180公斤的重物,最長能堅持24個小時,還不需要操作員。
美國海軍陸戰隊近期之內不會接納名AlphaDog,因為它太吵鬧, 會暴露部隊的位置.

Spot“斑點”一個形體更小、聲音更靜的機器人。研發時它稱為Little Dog”小狗”.它也被擱置到了一邊,因為它和“犬王”同屬一份合同。“斑點”可負重18公斤。
海軍陸戰隊中止 AlphaDog 和 Spot 的佈署計畫,也沒有後續測試或改良升級安排。
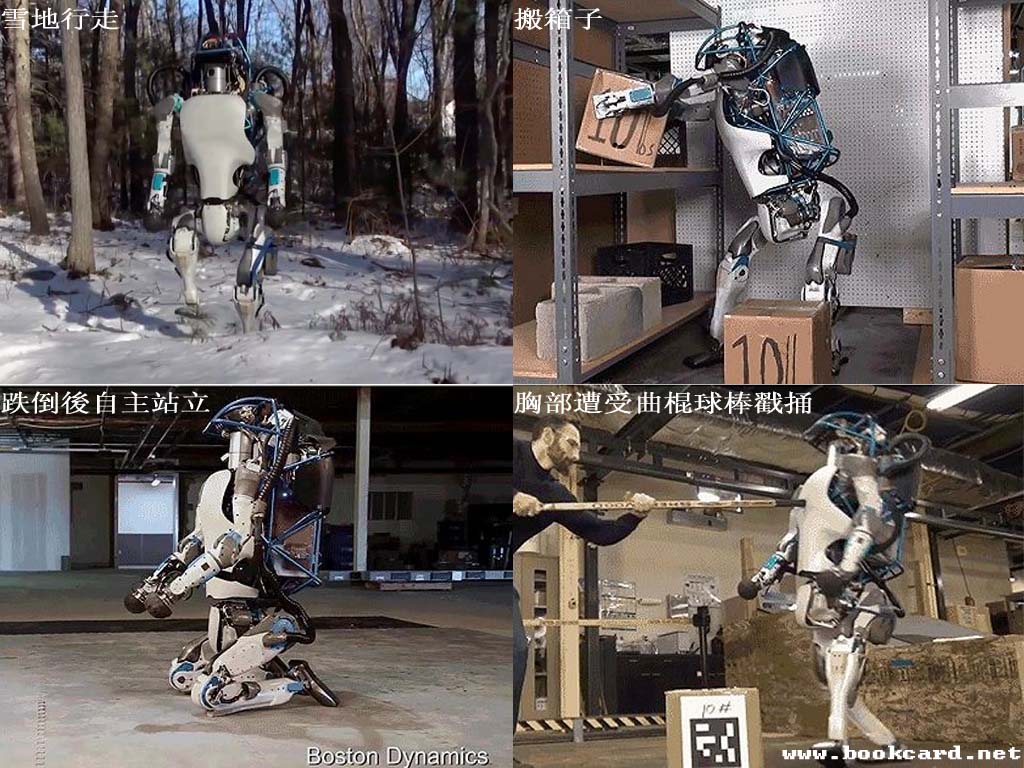
ATLAS人形機器人,更小、更輕、更靈活.新版機器人可以在積雪裏自由行走,可以抬起箱子放到架子上, 打開上鎖的大門,甚至跌倒後自主站立.暴力戳撞仍能保持自身的平衡。動態平衡在直立機器人身上實現了。因為下肢在快速移動的同時仍要支持著上身,這是很難做到的。
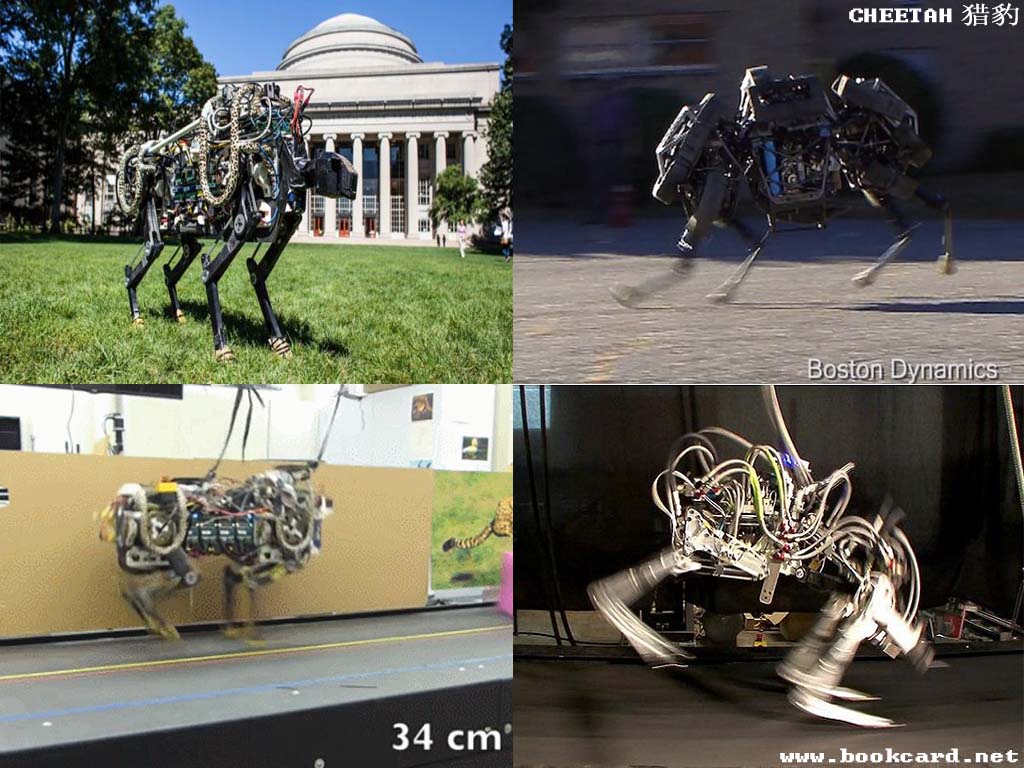
CHEETAH”猎豹”机器人是目前世界上速度最快的腿式机器人,奔跑速度超过29英里/时(约合47公里/时),打破了之前MIT机器人在1989年创下的13.1英里/时(约合21公里/时)的记录。
猎豹机器人的背部结构是关节型的,借鉴了猎豹的外形和奔跑方式, 提高了步幅和奔跑速度, 后腿的动力来源采用最新的电击方式,能够把每一次落地后的力量反弹成为下一次跳跃的蓄力,大大节省能源的同时,进一步提升速度。这与动物的运动原理相差无几。它的驱动力来自外部的液压泵。美國國防高等研究計畫提供资金支持。
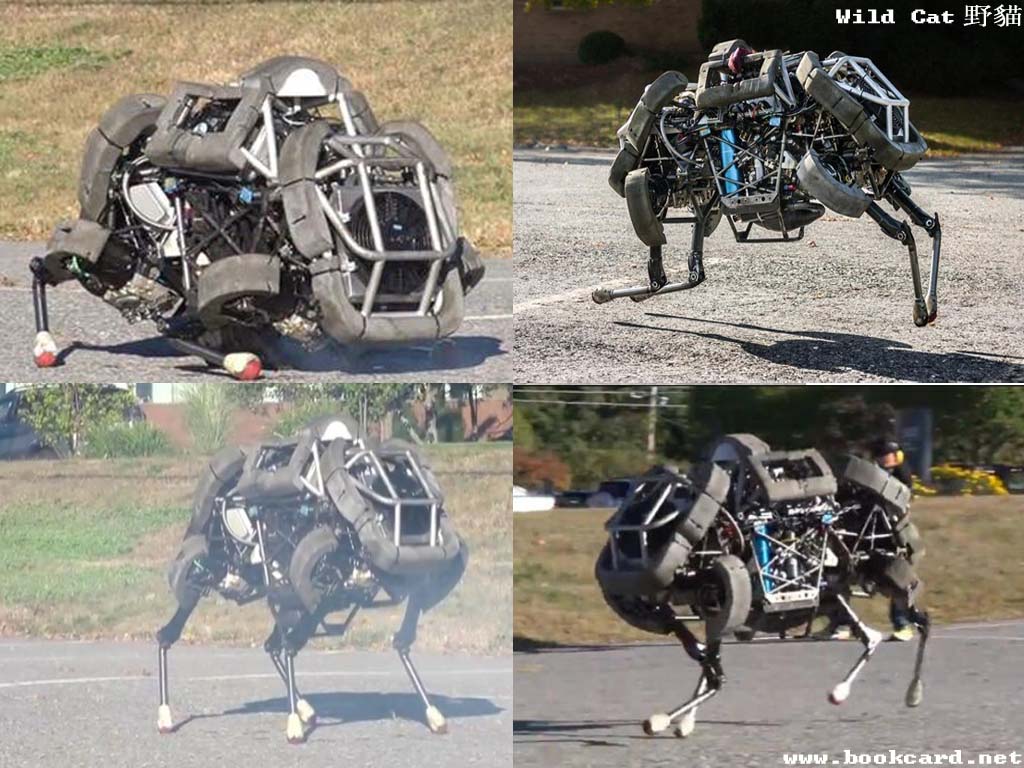
Wild Cat”野貓”實際上是CHEETAH”獵豹”的自由運轉版本,由兩衝程卡丁車引擎驅動, 啟動的瞬間伴隨著電鋸和重機發動時的巨響,然後慢慢地像動物一般站立起來,雖然它的速度尚未達到Cheetah”獵豹”的水準,但這種四腿機器人無論遇到哪種地形,也能以16英里/時(約合25公里/時)的速度奔跑。此外,它還可以快速跳躍和轉身。美國國防高等研究計畫提供资金支持。
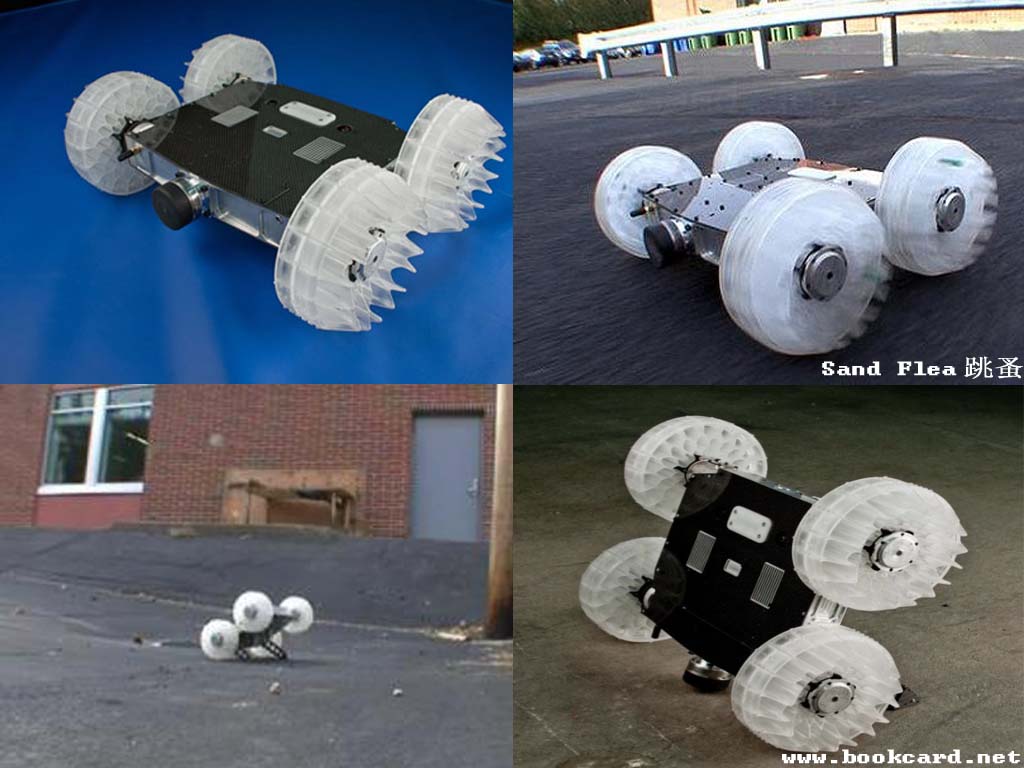
Sand Flea(跳蚤) 地上的監視和刺殺機器人。像老鼠一樣在地下地上到處尋找獵物。最重要的是,它不但在平地行走,一旦碰到臺階或不平的路都有可能無法前進。跳蚤可以自動計算需要跳躍的高度,然後準備好氣壓彈簧的壓力,跳躍最高30英尺(約合9.1米)左右!整個車只有10斤重。橡膠輪胎確保著陸和撞擊都沒有問題。美國國防高等研究計畫提供資金支持。

RISE一款四足爬牆機器人, 其設計構思使用了狗作為參照,人擁有四個腳, 在其腳部位置使用了外科手術針做為材料,可以在垂直物體上進行移動。是RiSE 爬牆機器人每秒鐘能夠爬高21釐米,速度相當快。 RiSE 爬牆機器人設計應用於搜索和救援行動,以及用於偵察和監視。美國國防高等研究計畫提供資金支援。

美國海軍陸戰隊員成功移植雙臂
現居於維珍尼亞州的前美國海軍陸戰隊員約翰.派克(John Peck)中士2010年在阿富汗服役的時候,兩隻手臂都被炸掉。他在2016年8月期間,在波士頓的一家醫院接受了雙臂移植手術;捐贈雙臂給他的是一名腦死亡的年輕男子。手術歷時14個小時,總共有60位外科醫生、護士和其他一些技術人員參與手術過程。手術後,派克不是馬上就能用這雙手臂來做事;因為神經的連接需要相當長的時間。這段時間內,派克新的手臂外面要打上石膏,作為保護。也許最多要等一年,他的新手指才能找回感覺。
佩克現時仍接受訓練,例如學習如何用那對手自己穿衣服、刷牙和進食。他說,最好的感覺就是可以和未婚妻拖手仔,他第一次拖未婚妻的手時,沒有甚麼感覺,但對他意義重大,好像已得到全世界。
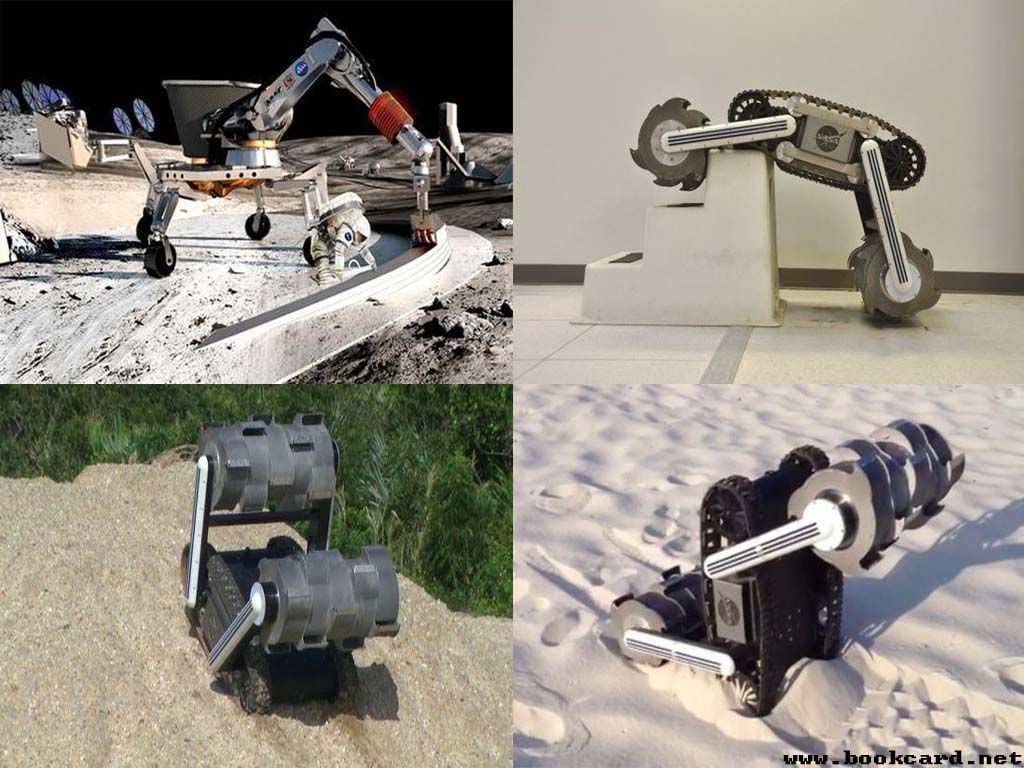
NASA研發太空採礦機器人RASSOR
人類向太空進行殖民,初期的物資需從地球帶過去,但以後就必需從當地採集.建造殖民地的原材料.
美國宇航局NASA研發出月球上進行資源開採的機器人RASSOR(Regolith Advanced Surface Systems Operations Robot ,風化層高級地面系統操作機器人),用於尋找水源、氧氣、火箭燃料,清掃出可以搭建建築物的空地,等。
因為機器人採用坦克履帶,所以它長的像一輛小型坦克。令它非常結實,如果翻車了,它可以重新進行糾正。因為要登上火箭,所以不能太笨重和太大。而在低於地球重力的環境下工作,重量又不能過輕。RASSOR的重量達100磅(45千克).它的創新之處在於兩端各有一個旋轉鏟鬥,轉速為每分鐘20轉.通過移動鏟鬥上端的機械臂,機器人就像長了兩條腿一樣,它們通過反向旋轉挖掘地表土壤,同時為一端提供足夠的牽引力,使得另一端能夠戳進土壤中。挖土、爬坡、翻轉對它來從不是問題。
RASSOR 可與馬可波羅/火星探路者號飛船協作,RASSOR 會將採集到的土壤倒入一個設備,後者將水和冰塊從土壤中析出,將其中的化學物質轉變成火箭燃料或可呼吸的空氣。
目前NASA已經開始了下一代RASSOR的研發工作,並希望能夠用輪子取代現在使用的坦克履帶。
Google發佈新款“像素”Pixel智能手機
2016年10月4日加利福尼亞州三藩市,Google產品管理總監艾理斯,介紹名為“像素”(Pixel)的新款智能手機。這是繼Nexus這個親生仔之後又一力作.它將會代替Nexus推出智能手機和平板電腦。
螢幕方面Pixel採用5.0英寸1080p螢幕,而Pixel XL採用2K解析度5.5英寸顯示幕。配置方面兩款手機近乎相同,採用驍龍821處理器輔以4GB運行記憶體+32GB/128GB存儲空間,搭載Android 7.1系統,支援DayDream VR平臺。32GB存儲的售價為649美元(約合人民幣4327元),而128GB的版本則為749美元(約合人民幣4995元),價格高的嚇死人,有“很黑”“真藍”“非常銀”三種顏色。將於今日在美國、澳大利亞、加拿大等地開始預約,13日在印度上線。中國大陸就別想了,雖由HTC代工生產. 但軟硬體則完全由Google自己設計。
1230萬圖元高品質的後置相機, 國外權威相機測試機構DxOMark給了它高於iPhone 7分數.
該機還擁有快充功能,充電15分鐘,就能用7小時。
谷歌首席執行官皮采表示,這款“谷歌助理”軟體使用了人工智慧技術,能夠“為每一位用戶提供個人化的Google服務”。 谷歌助手可以不斷學習,通過你的使用習慣和行為獲知你的喜好、需要和方位。主動為你提供合理化建議,而不是像往常一樣等待你的命令。

雅虎為美國情報機構監控郵件
2016年10月4日, 據路透社報導, 雅虎在去年在收到美國國家安全局(NSA)或聯邦調查局(FBI)的機密指令後對數以億計電郵帳戶進行了掃描。秘密創建掃描所有電郵帳戶接收郵件的程式。美國情報機構提供的關鍵字和詞語. 目前尚不清楚情報官員想獲得哪些資訊.也不清楚此郵件掃描程式是否仍在使用中。
此消息原自三名前雅虎雇員和熟悉這一事件的另外一位身份不明人士的講話.
雅虎首席執行官梅耶爾決定不違抗情報官員的命令,導致該公司首席資訊安全官亞曆克斯·斯塔莫斯(Alex Stamos)和至少一名安全人員辭職。
雅虎的資訊安全團隊直到2015年5月才發現這一軟體,他們最初的判斷是系統被駭客攻擊。
雅虎在回應路透社詢問後發表一篇簡短聲明中表示,“雅虎是一家遵紀守法的公司,遵守美國的法律。”並沒有就此事發表更多評論。而美國國家安全局(NSA)或聯邦調查局(FBI)都沒有對這報導置評。

Google Android系統遭歐盟反壟斷指控
Google公司多年來壟斷互聯網搜索入口,互聯網廣告,移動作業系統,移動操作應用商店,移動廣告,移動應用直付,對廣告用戶和網站主很多蠻橫做法,等等,成為標準國際壟斷集團.
2016年4月20日歐盟盯上Android系統, 停止向手機廠商預裝Play Store (應用商店)發放補貼, 不再強制預裝其專有應用, 如果Google繼續這種壟斷行為,等待它的將是一筆高額罰款。罰款數額的計算將基於歐洲用戶點擊AdWords廣告,通過Google搜索產品進行搜索,通過GooglePlay商店購買應用,以及AdMob應用內廣告產生的營收。
這次反壟斷調查起源於遊說團體 FairSearch 在 2013 年發起的投訴。FairSearch是一家于2010年成立的反Google聯盟.Google在搜索引擎領域壟斷地位, 令多家公司團結起來成立FairSearch, 避免Google繼續壟斷整個搜索領域, FairSearch此前就對Google提起過多項指控。

豐田迷你機器人Kirobo Mini
在獨自駕駛的途中,如果有人陪伴將會是非常有趣的,日本豐田汽車發佈迷你聊天機器人Kirobo Mini,手掌大小, 10釐米高. 定價39800日元(392美元), 名字來源於“kibo”和“robot”的組合, 意思是“希望”和“機器人”, 智商相當於5歲的兒童. 為駕駛者提供情感陪伴,或與小朋友聊天. 具有面部識別的功能,察言觀色, 當你情緒不好的話,它會主動安慰你.它能夠記錄司機的日常資料, 常去的地方和走的路線, 喜歡的音樂,GPS指路.
kirobo mini 的前身kirobo 機器人(2013年),它是第一個登上國際空間站的機器人。
豐田投入了許多資源開發自動駕駛汽車AI技術。Kirobo Mini是一塊跳板,以此為基礎開發更先進的機器人.
隨同機器人一起銷售的還有“搖籃”,作為機器人的嬰兒座椅使用,可以放置在汽車杯架上。將於2016年底在日本開始預售, 暫沒有海外銷售計畫.

太陽能玻璃窗
窗戶採集太陽能,一直是科學家努力實現的目標,試想當窗戶能採集太陽能,並把它存儲起來使用,能大幅能夠顯著降低發電對煤炭,天燃汽的依賴.
位於馬里蘭州哥倫比亞市的太陽窗科技公司, 首席執行官約翰•康克林說: 太陽能窗戶可以做成完全透明,或彩色,而彩色會提升其制電效率。控制顏色讓它變得更暗或者明亮, 或帶有藍綠色、綠灰色或者棕色.能被可見光透過的電池板效率要降低一半,這是因為透明的光電池只能從光譜中紫外與紅外的範圍中進行光電轉化。

農夫機器人(FarmBot)
農夫種植需要大量的體力,汗水和時間, 農夫機器人FarmBot的出現令一切變的輕鬆。
FarmBot像3D印表機一樣有XYZ三個方向,但配備感測器,種子注射器、耕犁和花灑噴嘴, 精確地定位一系列的操作如,整地,播種,澆水,施肥,除草,蔬菜收穫和資料獲取。
這機器由“農夫機器人公司”的首席執行官Rory Landon Aronson發明.這是一款為小型家庭種植糧食蔬果而設計的全套系統,在床墊大小的菜園裏,組裝一個機器人大約需要八小時。組件由鋁、不銹鋼和3D列印的塑膠製成,因此能夠經受住潮濕環境的侵蝕。售價3100美元. 但這家公司正計畫製造能夠適用於小型商業溫室種植園的更大的機器人。

互聯網名稱與數字位址分配機構
互聯網名稱與數字地址分配機構,(Internet Corporation for Assigned Names and Numbers,簡稱ICANN),創建於1998年9月18日, 克林頓政府時期, 非營利國際組織, 總部坐落於”加利福尼亞州洛杉磯”,該機構一直在美國商務部控制下, ICANN與美國政府(商務部)是合同關係,自成立以來負責全球互聯網域名和IP地址分配等相關職責.
亞利桑那、俄克拉荷馬、內華達和得克薩斯州的州司法部長本星期聯名簽署了訴狀,他們爭辯說,奧巴馬移交互聯網域名控制權的計劃是非法轉移美國聯邦財產,這類財產轉移需得到國會批准。試圖阻止這項移交。法官于星期五(9月30日)拒絕了這項請求。
美國政府對互聯網網名域名控制歷時40年的管轄權將終結。從2016年10月1日開始,負責ICANN日常業務的高管和董事會將向世界各大洲的所謂互聯網”利益攸關方小區”報告。
。
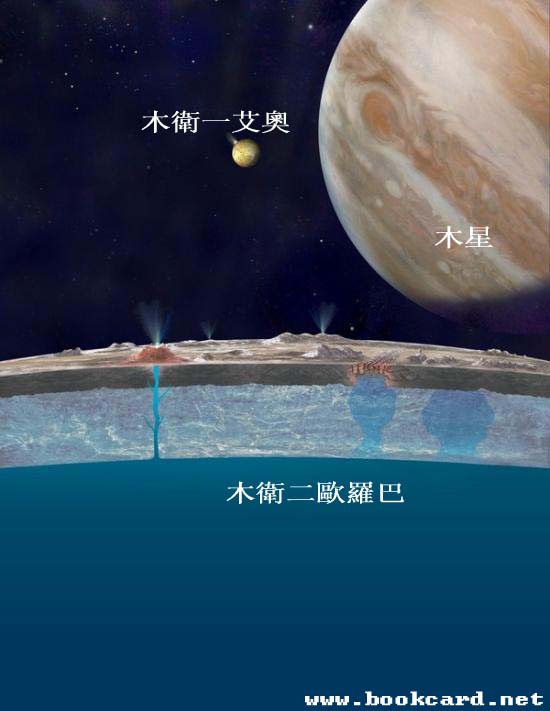
木衛二歐羅巴可能存在生命.
美國國家航空航天局(NASA),通過哈勃太空望遠鏡的觀察,木星衛星歐羅巴(Europa)存在地下海洋, NASA公佈了三張哈勃太空望遠鏡拍攝的歐羅巴的照片, 歐羅巴南極間歇性噴出羽狀水蒸氣,水汽噴發據估計有200公里那麼高,大量物質在被噴射到高空之後再落回木衛二表面, 估算其水量相當於地球水量的兩倍,這足以證據證明歐羅巴數英里厚的冰層下可能存在液態海洋,這是最有可能孕育生命的有利條件,這為科學研究提供了方便,科學家也許不用在木星著陸,也不用鑽穿冰層,就可以提取歐羅巴上的液態水.
NASA正在籌畫一個太陽能探測器進入木星軌道,對衛星歐羅巴的地表,大氣以及可能存在的內部海洋進行更深入的探測.
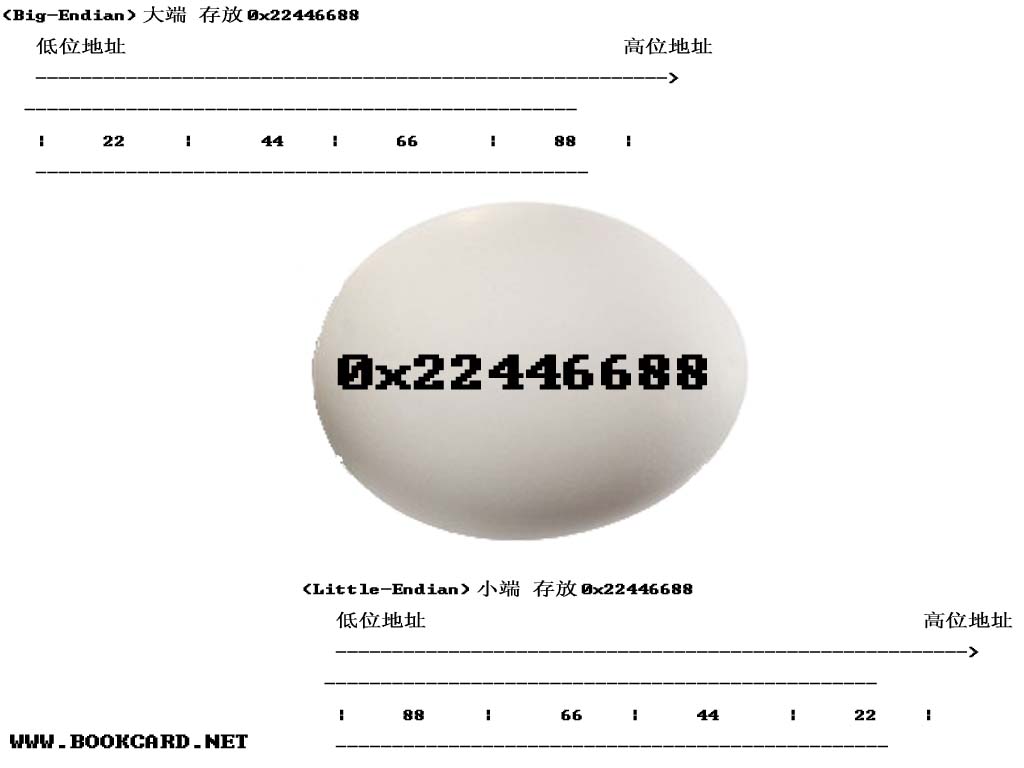
大端與小端
小人國的兩個派系因為水煮蛋時該從大的一端剝開還是小的一端剝開而爭論,發生六次判亂, 其中一個皇帝送了命,另一個丟了王位. 出自喬納森•斯威夫特的小說”格列佛遊記”
在1974年4月 Intel(英代爾)推出8080 CPU,它採用(Little-Endian)小端方式存取資料, 即低位優先,存取從最低位址開始按順序存放.因位Inter的X86的霸主地位,CPU運算都是小端, 稱為主機字節.
(Little-Endian)小端 存放0x22446688
低位地址 高位地址
——————————————————–>
————————————————-
| 88 | 66 | 44 | 22 |
————————————————-
在1974年8月Motorola(摩托羅拉)推出6800 CPU,它採用(Big-Endian)大端方式存取資料,即高位優先,存取從最高位址開始按順序存放.後來所大部分的網路資料均採用大端方式,稱為網路字節.
(Big-Endian)大端 存放0x22446688
低位地址 高位地址
——————————————————–>
————————————————-
| 22 | 44 | 66 | 88 |
————————————————-

倫敦皇家藝術學院設計師飛利浦·霍爾菲爾德設計的Grow Frame可折疊式水育農場. 在空置的集裝箱裏,每株植物種在一個盛著水和養料的容器裏, 加上可調節亮度的LED燈提供合適的光線. 種植白菜,菠菜,生菜和豆芽, 這些植物會製造氧氣,在種植蘑菇, 它吸收氧氣轉成二氧化碳, 令整系統自己保持平衡.
全球有每年1300萬個空集裝箱, 每個集裝箱占地12平方米,集裝箱運出去的是貨物,帶回的將會糧食,帶來很大經濟效益.

三星Note 7在上市之後光在美國就發生多起電池爆炸事件,造成55起汽車或房屋損毀,26人燒傷,被美國政府以及許多運輸業者對三星發出禁令.
三星為給蘋果的iPhone7的一記重擊並佔據市場,給予Note7高規格配置,特別在電池上造得更薄,容量更大,更快充電速度, 而問題就出在電池上.
因為在生產線品質控制不嚴.導致正負極發生接觸.導致了電池燃燒和爆炸.
為了增強續航,Note 7採用了3500mAh的電池,其實這電池容量也並不太高,我給老豆買的小米MAX電池容量就達到4850h, 我反而認為三星在電池使用上相當保守,完全是電池生產廠商品質控制不嚴所造成的.
三星的電池生產分別是SDI和ALT兩家.現在出現問題的是SDI,中國大陸則是由ATL生產.
SDI(Samsung SDI Co.) 三星子公司
ATL(Amperex Technology Ltd)香港新能源科技有限公司
此前三星預測,Note7第三季出貨量達400~500萬部,第四季度出貨量達800萬~900萬部.更令三星喜出望外的是,Note 7在發售之後的數周就達到250萬部的銷量,本可以iPhone7給一記重擊,現在卻麻煩不斷, 三星在9月2號停止Note7銷售.三星股價跳崖式大跌11%,市值蒸發掉了260億美元,超過10億美元召回成本,營收將會減少50億美元,年利潤率則降低5%.
一子錯滿盤皆落索,做生意就是這樣,其中一個環節出錯就可以帶來嚴重的損傷.
這給蘋果一次喘息的機會, 但iPhone7也沒有很大的改進,依然封閉,所以我並不看好蘋果,因為封閉不會帶來長久的繁榮.只有開放人別人參與分享,才會帶來長久的繁榮.

美國雅虎於2016年9月22日對外界公佈,其電郵系統5億用戶資料遭人竊取,包括姓名, 電子郵箱,電話號碼,生日,密碼.
密碼遭人盜取只講明一個問題,保存密碼的是明文,而不是保存密文,也就是密碼的指紋.通過一種不可易哈希演算法計算取的密文.
而人在密碼的使用上,通常會在不同的帳後使用相同或相近的密碼,這樣更大問題接種而來,你的姓名,電話號碼和生日,密碼,可被用來撞庫,那麼你的其他帳後也會被輕易攻破.
所以駭客為什麼要大量的用戶資訊. 雅虎郵箱從1996年開始提供服務,有大量用戶使用,更多用戶將會洩密.

全球有四款不同插頭與插座標準,英標,歐標,美標,澳標.
當你外出的時,你手機充電器,手提電腦充電器很可能與當地插座不匹配,這款萬能轉換器可幫到你!
使用方法很簡單.使用時先解鎖UNLOCK,彈出插腳後在鎖定LOCK.
英標式插腳: 半絕緣實心四方插腳,帶有防觸電保護.
英國,新西蘭,印度,巴基斯坦,香港,澳門,馬爾代夫,新加坡,馬來西亞,巴林群島,不丹,汶萊,博茨瓦納,賽普勒斯,葉門,加納,肯雅,卡塔爾,坦桑尼亞,辛巴威,阿聯酋等.
歐式插腳:半絕緣實心全銅插腳,帶有防觸電保護.
德國,法國,荷蘭,比利時,丹麥,芬蘭,挪威,瑞士,瑞典,波蘭,希臘,德國,盧森堡,奧地利,匈牙利,捷克,俄羅斯,羅馬利亞,義大利,西班牙,葡萄牙,印尼,印度,尼泊爾,孟加拉,巴基斯坦,土耳其,智利,埃及,摩洛哥.
美式插腳:全銅插片
兩直插:中國,美國,日本,澳大利亞,加拿大,臺灣,哥倫比亞,越南.
澳式插腳:全銅插片
兩扁插:美國,日本,澳大利亞,加拿大,臺灣,哥倫比亞,越南.